Grupo 13- Campus Madrid
Álvaro Castillo Ferrero
Juan Baumann Zarate
Eric Fernández Sacristán
ROBOTZIL
Índice
1.Introduccion
2. Componentes
3. Funcionamiento
4. Mejoras
5. Problemas encontrados
1. Introducción
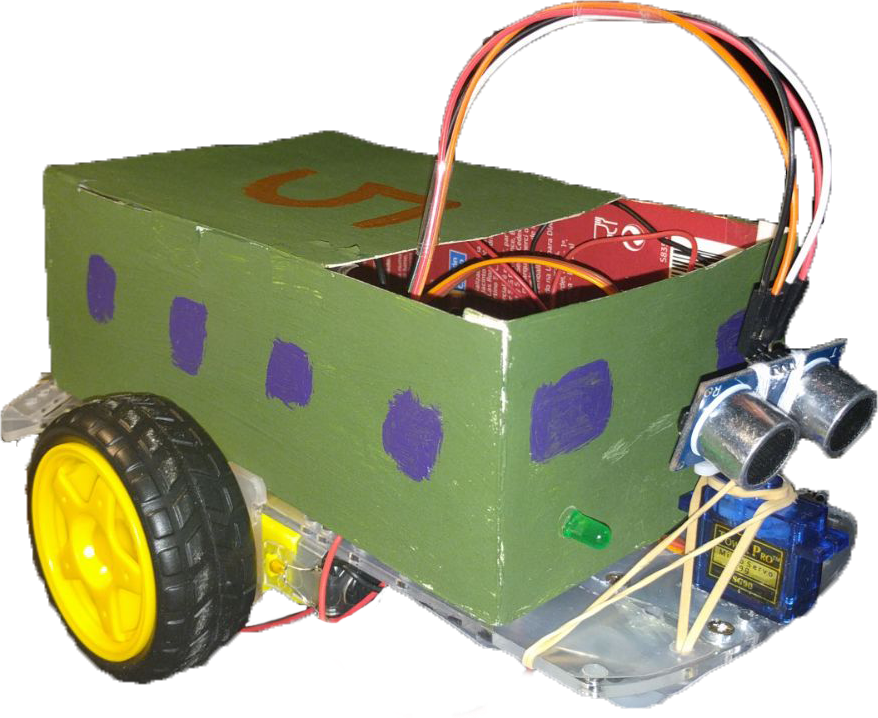
El proyecto ha consistido en la creación de un robot con movimiento autónomo que detecta y evita
los obstáculos que se pueda encontrar por el camino, con indicadores visuales lumínicos de su
dirección.
2.Componentes
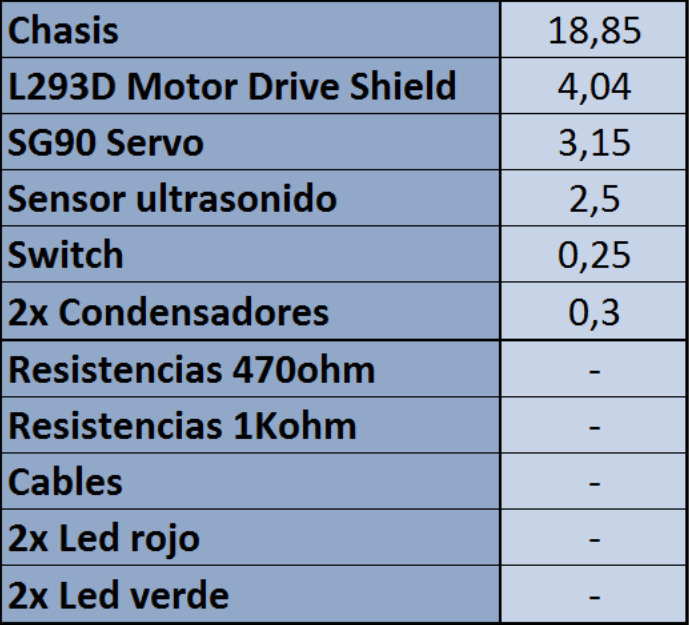
Los materiales han tenido un coste total de 29,09 euros .Los materiales que aparecen en la tabla y no tienen precio hacen referencia a los materiales proporcionados por la universidad
3. Funcionamiento
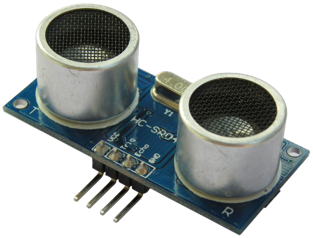
Hemos utilizado dos motores para poder facilitar el desplazamiento de nuestro robot y un sensor ultrasónico que actúa cuando nuestro robot detecta un obstáculo.
Para cuando encontremos un obstáculo nuestro robot funciona de la siguiente manera:
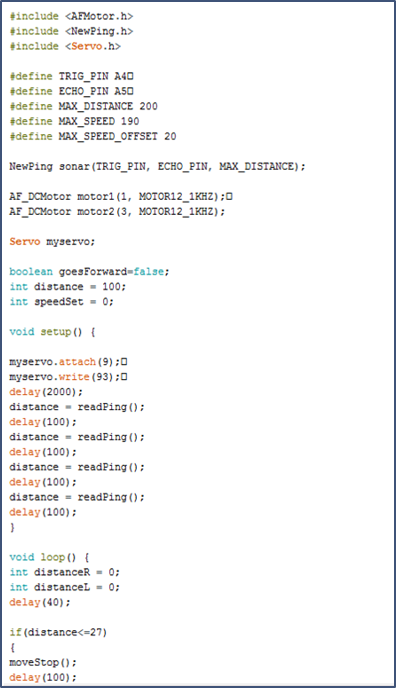
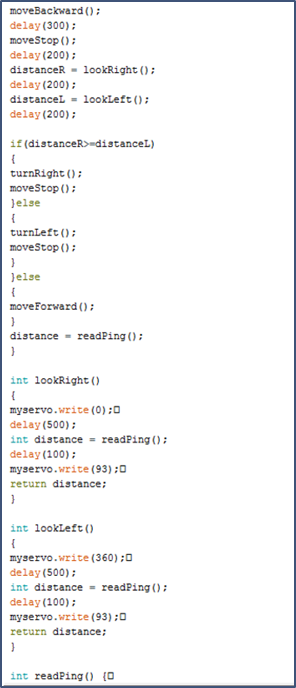
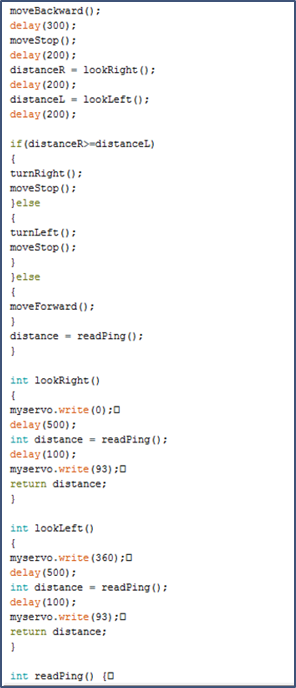
Tomamos como variables en la programación de nuestro Arduino la distancia que recorre y la velocidad a la que se desplaza y como métodos los desplazamientos como parar ante el obstáculo, el avance hacia delante y hacia atrás y los movimientos de giro hacia la derecha o hacia la izquierda según lo que queramos que haga
En estas dos imágenes tomamos como referencia la distancia que recorren teniendo en cuenta también hacia donde se mueve
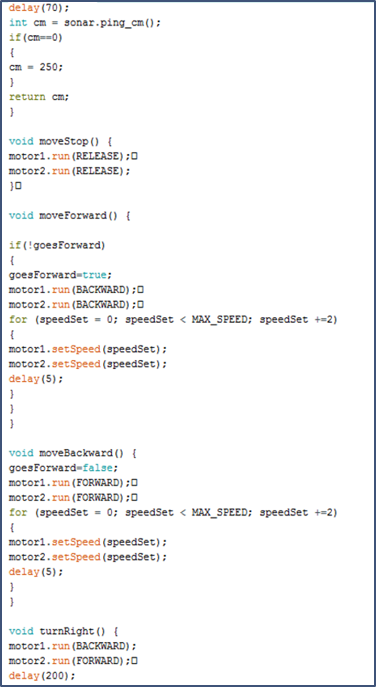
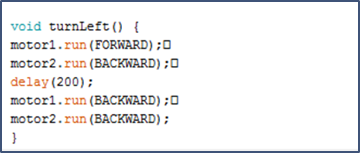
En estas dos imágenes vemos los métodos de desplazamiento y el funcionamiento del robot ante obstáculos encontrados en su recorrido
4.Mejoras
Hemos
añadido dos leds, uno de color rojo y otro verde para los cuales hemos añadido otros métodos para que se
encienda uno u otro según el desplazamiento del robot. En nuestro caso, el led
rojo se encenderá cuando el robot encuentre el obstáculo y se tenga que parar para
evitarlo. En caso contrario si el robot no encuentra obstáculo o si lo
encuentra y lo supera se encenderá el led verde
5.Problemas encontrados
-Necesidad de soldar debido al movimiento y a la poca sujeción de los pines del Shield
– El coche hacia las acciones contrarias. Posible problema de polaridad en el montaje
Solución : Cambiar instrucciones del código
– La poca luz dada por los leds, sobre todo de los verdes . Solución: Resistencias de menor ohmiaje.
– Tuvimos que modificar los cables macho-macho por macho-hembra para el sensor
– Encontrar la posición exacta para que el servo motor estuviese centrado durante la marcha
– Problemas de detección de distancia real con el ultrasonido. Existen problemas en superficies que encuentra en diagonal, ya que el eco no vuelve.
– La conexión a través de USB no suministraba energía a los motores
– No se podía modificar código sin energía externa. El coche debía estar ON
– La placa del chasis llegó rota
A continuación de la explicación de nuestro proyecto incluiremos el enlace del Drive en el que podemos ver los videos del funcionamiento de nuestro coche , la presentación , la memoria y el código Arduino utilizado




{kind=link}