BlueEcoRadar


Introducción.
Nuestro
proyecto para la asignatura de Sistemas Empotrados y de Tiempo Real consiste en
la utilización de un radar que detecta objetos a 40 cm y lo muestra por pantalla,
al que hemos llamado “BlueEcoRadar(BER)” pues se controlara a través de un
dispositivo Android con bluetooth (un Smartphone, una Tablet, etc.) con una aplicación de Android y usa un sensor
de ultrasonido que recibe el eco.
para este proyecto consta de dos partes, uno para Arduino y otro para Processing;
y por otro lado para la aplicación de Android. EL Arduino se encargará de tomar
las medidas de distancia para cada posición del servo y mover este desde la
posición de 0° a 180° y viceversa, además de manejar los componentes según
reciba las ordenes por bluetooth al puerto serial.
Componentes del grupo 1:
Esquemas de conexión.
Un sensor ultrasónico
Un servomotor que moverá nuestro
sensor ultrasónico
Un láser que se encenderá cuando
detecte un objeto el sensor ultrasónico
Un módulo de bluetooth por donde
mandaremos ordenes al Arduino
La placa de Arduino Uno.
De un dispositivo Android con bluetooth
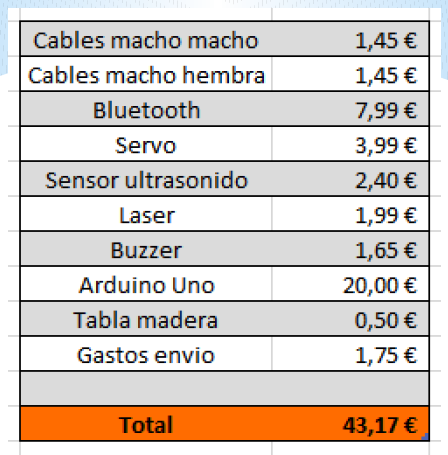
siguiente:
Coste total del proyecto
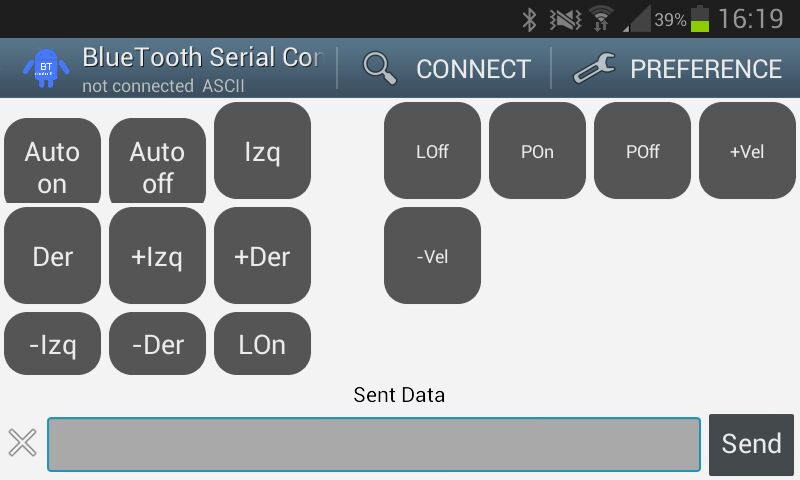
Funcionamiento básico de la
aplicación Android.
configurar programa Bluetooth
serial controller cuya funcionalidad consiste en enviar una letra distinta por
cada botón, y el Arduino, dependiendo de la letra recibida, realizamos una
acción u otra.
utiliza software serial por los pines 5 y 6.
Añadir |
Botón App |
Texto Enviado |
N.º Botón |
|
Poner en modo automático |
Autoon |
A |
1 |
|
Activar modo estático |
Autooff |
B |
2 |
|
En modo estático, mover izquierda |
Izq |
C |
3 |
|
En modo estático, mover derecha |
Der |
D |
4 |
|
Ángulo aumentar margen izquierdo |
+Izq |
E |
5 |
|
Ángulo disminuir margen izquierdo |
-Izq |
F |
7 |
|
Ángulo aumentar margen derecho |
+Der |
G |
6 |
|
Ángulo disminuir margen derecho |
-Der |
H |
8 |
|
Activar láser cuando detecte un objeto |
Lon |
I |
9 |
|
Desactivar láser cuando detecte un objeto |
Loff |
J |
10 |
|
Activar pitido cuando detecte un objeto |
Pon |
K |
11 |
|
Desactivar pitido cuando detecte un objeto |
Poff |
L |
12 |
|
En modo automático, aumentar velocidad |
+Vel |
M |
13 |
|
En modo estático, disminuir velocidad |
-Vel |
N |
14 |
Configuración del módulo bluetooth del Arduino
el Bluetooth con comandos AT.
configurado necesario desconectar pin key del Bluetooth.
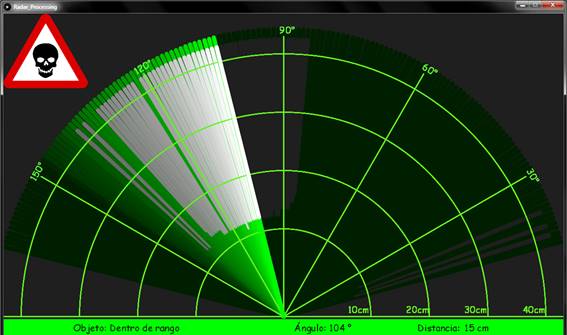
Funcionamiento Processing….
usar Processing con Arduino para crear un entorno de visualización de
datos mucho más atractivo visualmente y con más posibilidades que si usamos el
Monitor Serial del IDE de Arduino.
de Processing crearemos un entorno visual para usarlo con nuestro radar Arduino
Con un barrido de 180° podremos medir la distancia de un área y visualizar si
se producen cambios.
el ángulo recibido. 4 – Solo si la distancia recibida es menor que 40 cm se
dibuja la línea blanca y se muestra la distancia a la que está el objeto.
Debemos
tener conectado Arduino a nuestro PC mediante el cable USB y cargado con el
código Radar
con Arduino. Arduino nos envía una serie de parámetros por el
puerto serie que Processing debe descomponer e interpretar.
Enviamos a Processing la distancia calculada y el
ángulo en el que se encuentra el servo. Estos parámetros son
datos numéricos.
Posible funcionalidad
extra que podía darse
- Un juego
que consiste en murciélago caza mosquitos, donde cada vez que se come un
mosquito aumenta el tiempo para jugar la partida en 2 segundos. Finalizara,
cuando el tiempo se agote finalizara el juego.
Enlace
Video demostrativo (se subira)
Enlace códigos Arduino y Processing
- Utilizar
componentes de mejor calidad para tener mejores resultados. - Visualizar
el radar en el móvil. - Enviar
avisos (E-mail, SMS etc.) Al usuario al detectar objetos. 4 – Control a través
de WIFI en vez de Bluetooth.

