SEyTR Vicálvaro Grupo 8 Comedero Arduino
1.
Introducción
e idea general
Introducción
e idea general
Con la práctica de Arduino decidimos solventar un problema
que está presente hoy en día en las casas de personas que tienen mascotas y que
no pueden llevarlas consigo en vacaciones o durante unos pocos días. Es por ello por lo que creamos un dispensador
de agua y comida automático que se encargará de proporcionársela a nuestra
mascota sin necesidad de preocuparnos.
que está presente hoy en día en las casas de personas que tienen mascotas y que
no pueden llevarlas consigo en vacaciones o durante unos pocos días. Es por ello por lo que creamos un dispensador
de agua y comida automático que se encargará de proporcionársela a nuestra
mascota sin necesidad de preocuparnos.
Se trata pues, de una solución al abandono o descuido de
mascotas en cuanto a la falta de agua y comida se refiere y de esta manera
conseguir un mejor cuidado de éstas.
mascotas en cuanto a la falta de agua y comida se refiere y de esta manera
conseguir un mejor cuidado de éstas.
El dispositivo funciona de forma autónoma, de tal manera que
la única preocupación que debe de tener el dueño es la recarga de los compartimentos de agua o comida. Aunque
sólo haya 4 compartimentos de comida en el prototipo, es posible aumentar esta
capacidad mediante la sustitución del cilindro que la contiene por otro de
mayor capacidad, aumentando así su autonomía.
la única preocupación que debe de tener el dueño es la recarga de los compartimentos de agua o comida. Aunque
sólo haya 4 compartimentos de comida en el prototipo, es posible aumentar esta
capacidad mediante la sustitución del cilindro que la contiene por otro de
mayor capacidad, aumentando así su autonomía.
Cuando uno de los compartimentos se vacía, se enciende un
led rojo que indica al dueño que el compartimento ha de rellenarse. Hay,
además, un sensor de proximidad que provoca la emisión de un pitido por parte
del piezoeléctrico y evita que el animal
se acerque al Arduino mientras se está echando agua o comida. Además dispone de
un sensor LDR que permite encender una bombilla cuando el nivel de luz baja para que la mascota pueda ver
perfectamente donde está su recipiente.
led rojo que indica al dueño que el compartimento ha de rellenarse. Hay,
además, un sensor de proximidad que provoca la emisión de un pitido por parte
del piezoeléctrico y evita que el animal
se acerque al Arduino mientras se está echando agua o comida. Además dispone de
un sensor LDR que permite encender una bombilla cuando el nivel de luz baja para que la mascota pueda ver
perfectamente donde está su recipiente.
Además, aunque por problemas técnicos no pudimos
utilizarlos, se podría disponer de unos sensores de presión que antes de echar
más comida a las horas programadas, miden si ya hay comida y en caso de haber
no echa más.
utilizarlos, se podría disponer de unos sensores de presión que antes de echar
más comida a las horas programadas, miden si ya hay comida y en caso de haber
no echa más.
3.
Esquema del
circuito
Esquema del
circuito
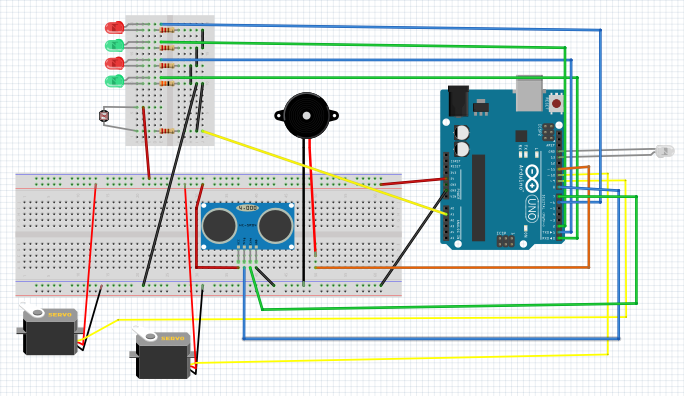
A continuación un esquema del circuito de nuestro proyecto:
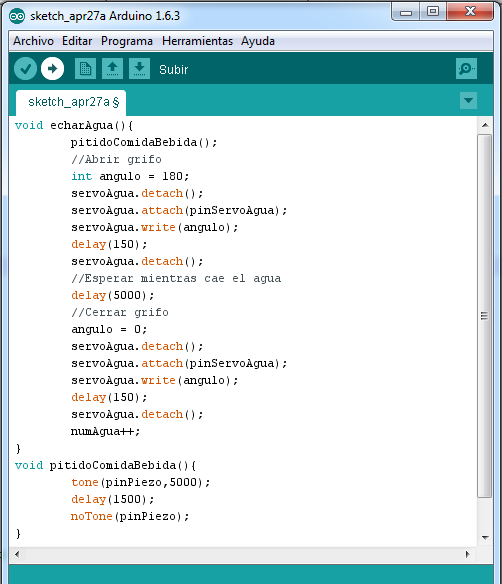
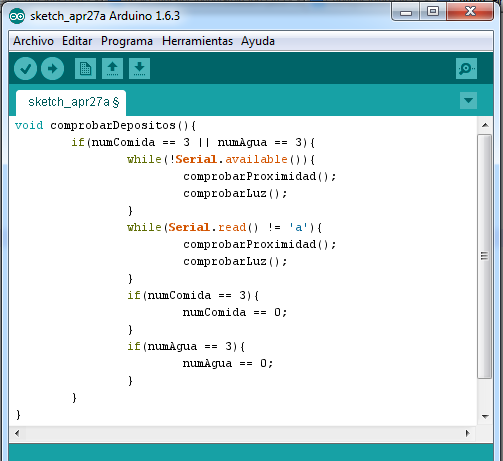
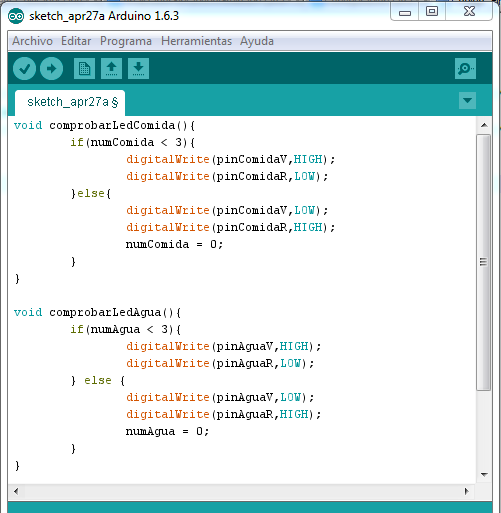
4.
Código
Arduino
Código
Arduino
5.
Lista de
componentes y precio
Lista de
componentes y precio
COMPONENTE |
PRECIO |
2x Protoboard |
16€ |
2x Sensor de fuerza |
26€ |
2x Servo motor de rotación continua |
28€ |
2x Bombilla |
5,5€ |
Grifo, cables, leds.. |
6€ |
Total |
67,5€ |
6.
Fotos y
videos del montaje y funcionamiento
Fotos y
videos del montaje y funcionamiento
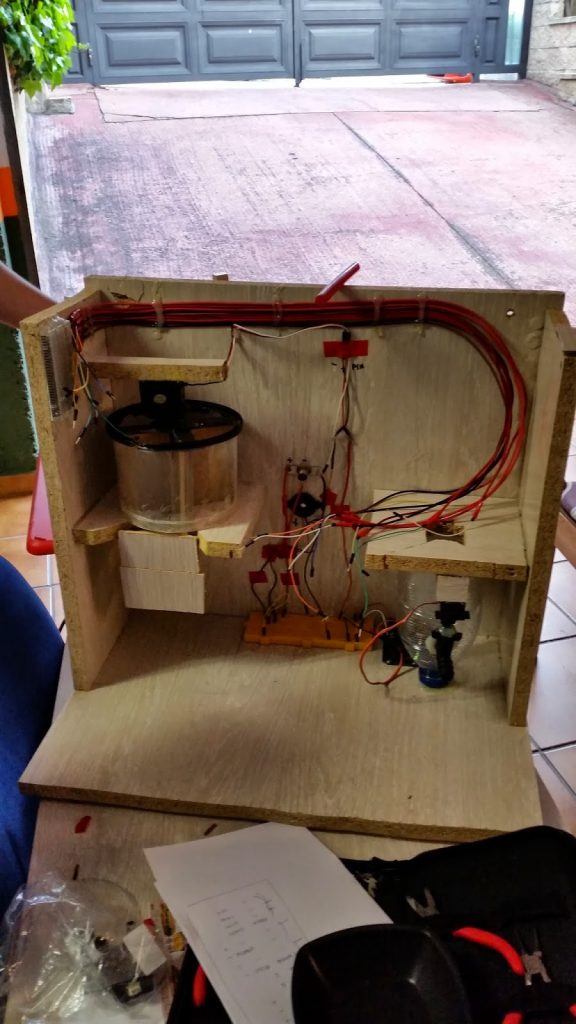
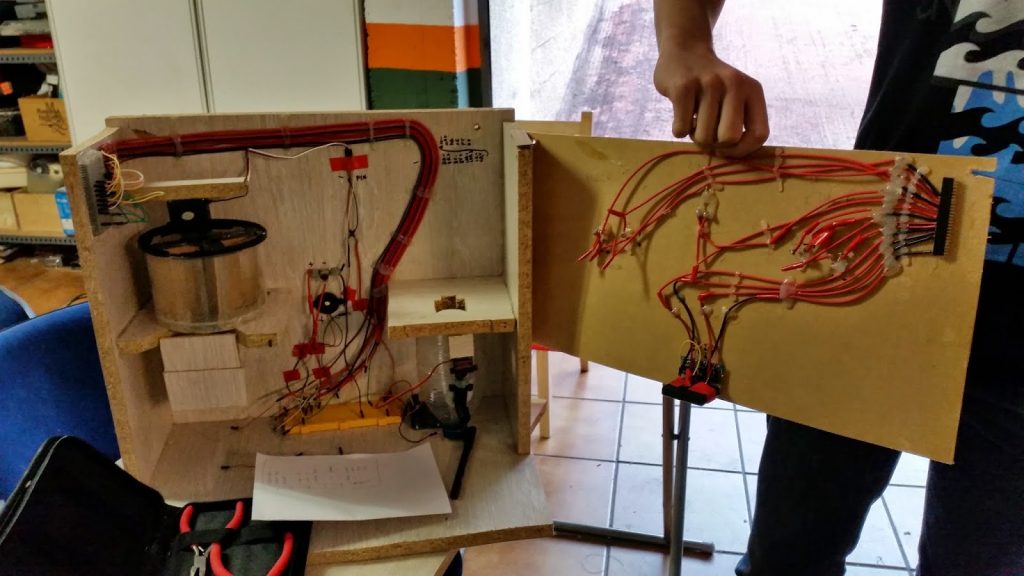
Montaje:
Inicios

Proceso de construcción
Cableado tapa

Cableado tapa terminado
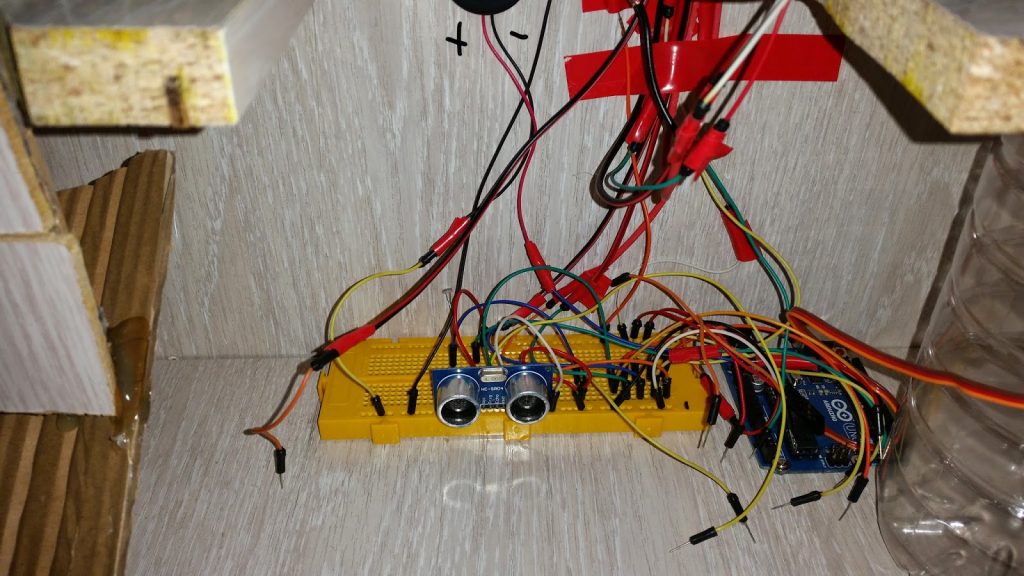
Probando el cableado

Conectando los sensores
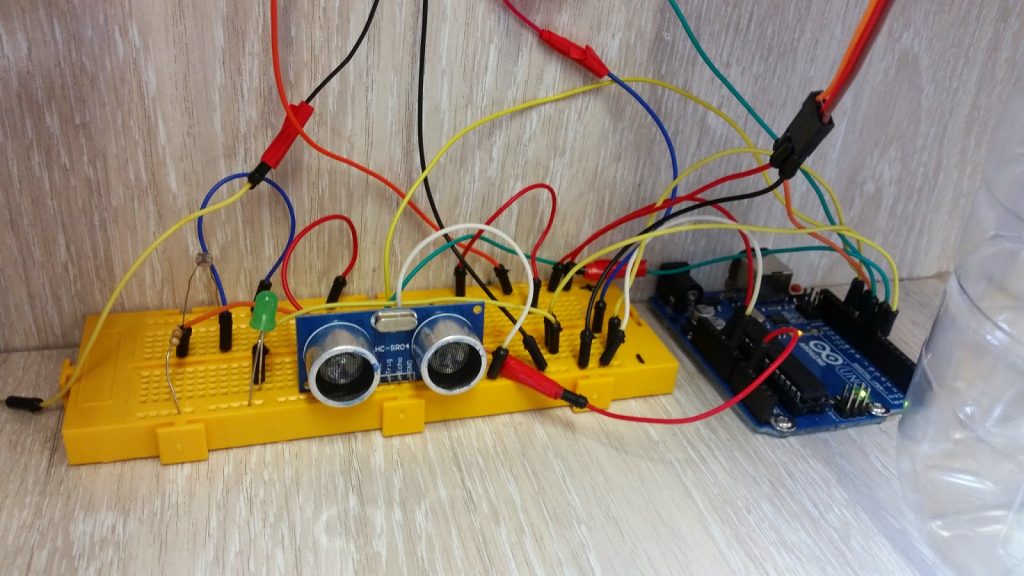
Cableado de los sensores
Proyecto finalizado

Videos del
funcionamiento:
funcionamiento:
A continuación se puede observar un video que realiza un recorrido por los puntos clave del
proyecto:
proyecto:
El funcionamiento de cada funcionalidad por separado se puede
observar en los siguientes videos:
observar en los siguientes videos:
Dispensador de
comida:
comida:
Dispensador de
bebida:
bebida:
Sensor LDR:
Sensor de proximidad:
Por último el comedero
finalizado en funcionamiento es el siguiente:
finalizado en funcionamiento es el siguiente:


