TURBOLINEA GTI
Grupo 23:
Jaime Noguerales Urbanos
Beatriz Esteban Alcántara
Lía Campos Vélez
Manuel Martín Sierra
Índice
– 1. Resumen
– 2. Materiales
– 3. Montaje
– 4. Funcionamiento
– 5. Problemas-Potencia , problemas con cables,pantalla,siguelineas.
– 6. Conclusiones . Esquivar obstáculos y botones por bluetooth
– 7. Código del Programa
– 8. Vídeo
– 1. Resumen
En un momento en el que los coches autónomos están tan presentes, hemos querido aproximarnos lo máximo posible a esa idea. Este proyecto, por tanto, realizamos un coche con la funcionalidad habitual de seguir líneas, detectar colores,evitar obstáculos,variar la velocidad y le añadimos funciones extra como son:
En un momento en el que los coches autónomos están tan presentes, hemos querido aproximarnos lo máximo posible a esa idea. Este proyecto, por tanto, realizamos un coche con la funcionalidad habitual de seguir líneas, detectar colores,evitar obstáculos,variar la velocidad y le añadimos funciones extra como son:
- Control por bluetooth
- Sonido del claxon
- Coche fantástico(Leds delanteros)
– 2. Materiales
Pieza |
Foto |
Cantidad |
Precio |
Arduino UNO |
 |
2 |
20,00€ |
Chasis con motores |
 |
1 |
15,99€ |
Driver L298N |
 |
1 |
5,99€ |
Siguelíneas |
 |
2 |
9,50€ |
Sensor de color |
 |
1 |
8,42€ |
Sensor de inflarrojos |
 |
1 |
3,99€ |
Módulo bluetooth hc-06 |
 |
1 |
8,49€ |
Led rojo |
 |
4 |
0.20€ |
Placa protoboard |
 |
1 |
1,81€ |
Pantalla LCD 16×2 |
 |
1 |
2,90€ |
Zumbador |
 |
1 |
1,56€ |
Pilas 9V |
 |
8 |
1,27€ |
Conector arduino con la pila. |
 |
2 |
2,18€ |
Total gastado: 123,42€
– 3. Montaje





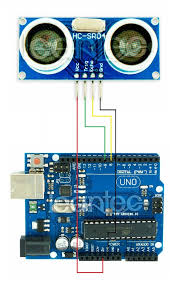

Lo primero que hicimos fue conectar el driver L298N a las dos ruedas delanteras.
Después conectamos los siguelíneas
Sensores de color
A continuación, anclamos la placa de arriba del chasis, la cual recoge a: el segundo arduino, la pantalla LCD 16×2, la protoboard en la que van conectada el zumbador y los leds, y el sensor de infrarrojos.
Zumbador
Bluetooth
Sensor de infrarrojos
Pantalla LCD
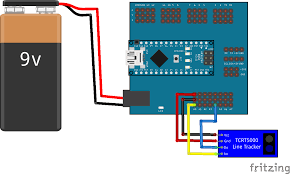
- Primer arduino UNO: bluetooth, sensor de infrarrojos, driver L298N y sensor siguelineas.
- Segundo arduino UNO: pantalla LCD, sensor de color, zumbador y leds.
Para la conexión entre ambos arduinos utilizamos su puertos serie intercambiados. TX1 con RX2 y Rx1 con TX2. Y conectamos un pin GND de uno con otro GND del otro arduino.
– 4. Funcionamiento
Turbolinea GTI funciona desde el móvil mediante bluetooth. Para ello utilizamos una aplicación ya implementada: Arduino bluetooth RC car.
Al estar la aplicación ya implementada, la hemos adaptado a nuestras necesidades. El menú de la aplicación es el que aparece en la segunda foto:



Al estar la aplicación ya implementada, la hemos adaptado a nuestras necesidades. El menú de la aplicación es el que aparece en la segunda foto:
- Con las flechas controlamos la dirección que lleva nuestro coche.
- Con el velocímetro: Controlamos la velocidad de nuestro coche, que varia de 0 hasta 250(Arriba a la derecha)
- Las luces de delante: activan el modo “Coche fantástico” en el que se encienden los leds de delante haciendo el efecto del coche fantástico.(Icono parte delantera coche)
- Con las luces de atrás: activan el modo “Seguir líneas”, en que el coche de manera automática comienza a buscar líneas y si encuentra alguna la comienza a seguir.(Icono parte delantera coche)
- Con el claxon: Activamos el claxon de nuestro coche mientras el botón esté activado.(Altavoz)
- Y por último con el triángulo: activamos el modo “Destino color x”, en el que el coche se para si encuentra el color x, que puede ser rojo, azul o verde.
Mientras no pulsemos el triángulo, el coche no se parará en ninguno de esos tres colores, pero sí detectará estos tres colores y los mostrará por la pantalla LCD.
Sin detectar ningún color, muestra “Hola Hola Hola”:
Detectando el color rojo:
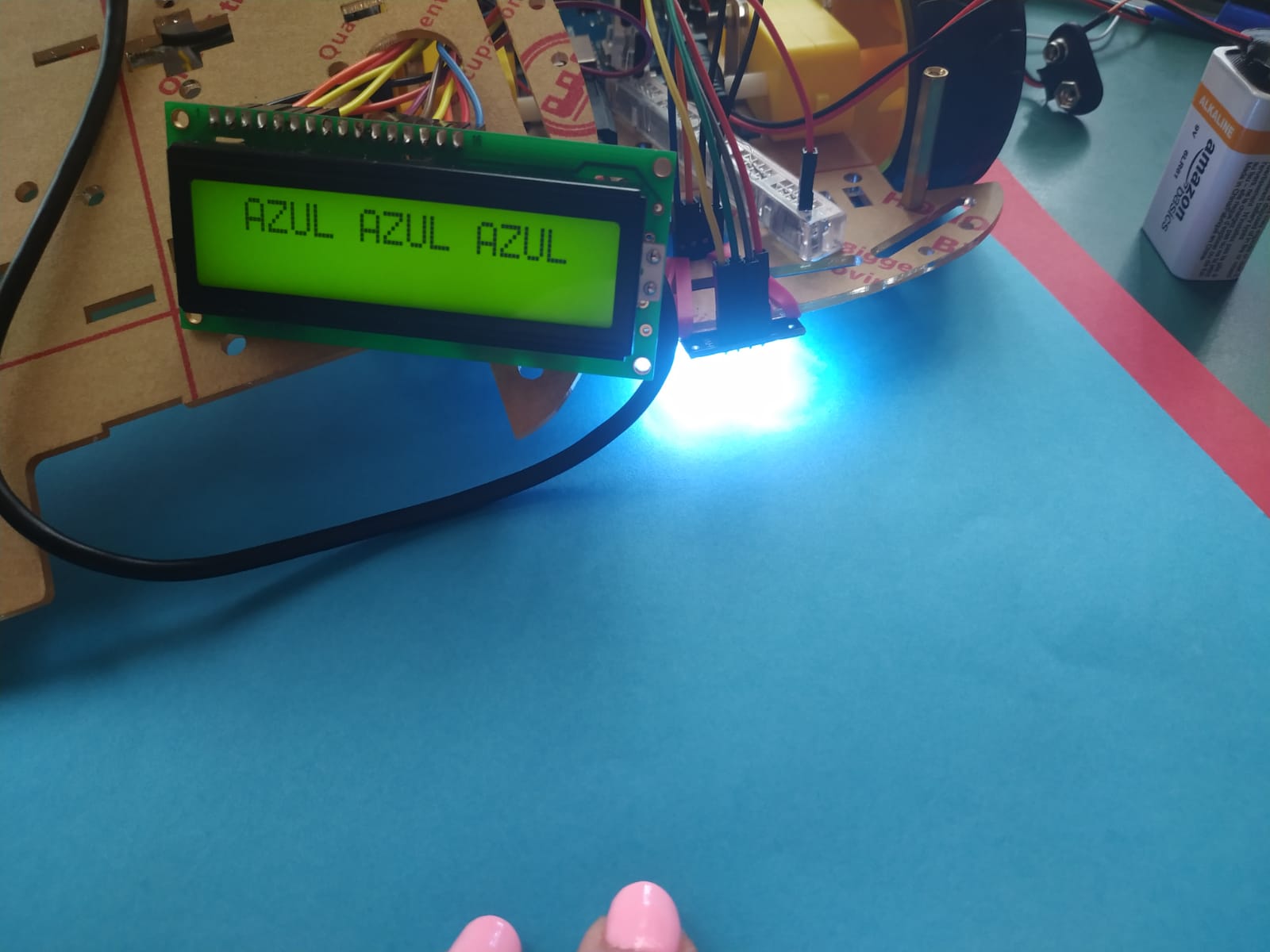
Detectando el color azul:
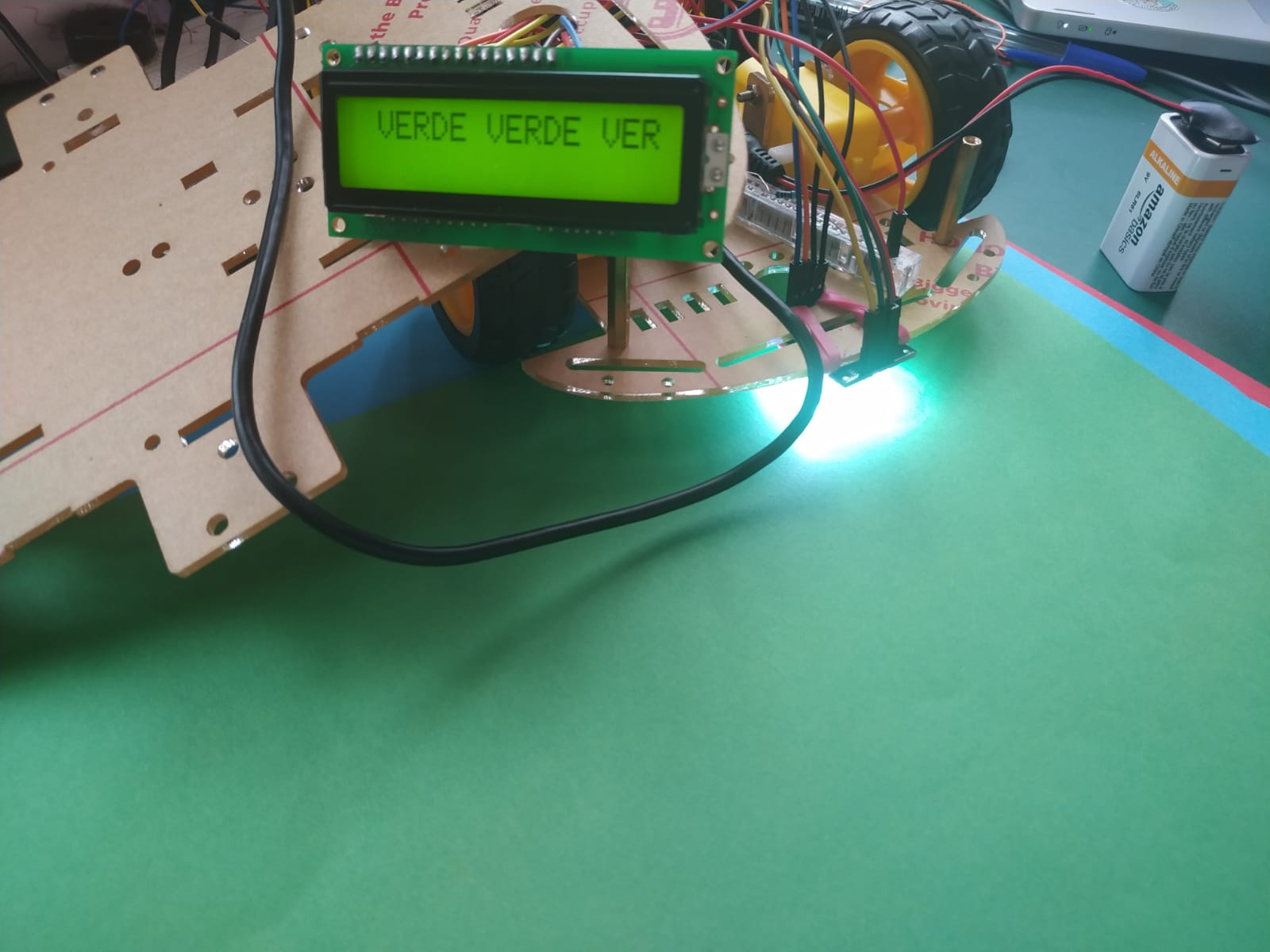
Detectando el culo verde:
– 5. Problemas
Los principales problemas encontrados han sido:
- Problema con una rueda por voltaje insuficiente. Poca o nulo movilidad de las ruedas al aplicar 5V.
- Solución: Conectar el driver a una pila de 9V.
- Trabajar con un gran número de cables. Una forma de aminorar el problema ha sido agrupar o sujetar ciertos cables con gomas.
- Modulo bluetooth HC-06 venía con una velocidad cambiada (distinta a 9600 baudios)
- Solución: Al configurar el módulo bluetooth, a parte de establecer su nombre y su pin, cambiar la velocidad a 9600 baudios.
- Pines insuficientes para poder conectar todos los componentes.
- Solución: Utilizar dos dispositivos de arduino conectados entre sí.
- Conectar los dos arduinos por puerto serie y a la vez trabajar con el bluetooth.
- Solución(posible): Crear otro puerto serie artificial o convertir el puerto serie físico del arduino en uno artificial al cual si poder aplicar la función listen.
– 6. Conclusiones
Estamos ante un coche muy versátil en cuanto a funcionalidad y con un sello propio de diseño, pues visualmente es distinto a ya lo presentado en clase.
Aún así, y como todo, no está exento de mejoras, y proponemos estas mejoras futuras para Turbolinea GTI:
Estamos ante un coche muy versátil en cuanto a funcionalidad y con un sello propio de diseño, pues visualmente es distinto a ya lo presentado en clase.
Aún así, y como todo, no está exento de mejoras, y proponemos estas mejoras futuras para Turbolinea GTI:
- Control por wifi
- Aumentar la velocidad máxima del coche
- Añadir cámara frontal
– 7. Código del Programa
– 8. Vídeo

