Grupo 2 Robot de Cocina
COOKING ARDUINO 3000
Descripción del proyecto:
Nuestro sistema permite preparar de forma automática la comida,
contando con un hornillo, una olla, un sistema de dispensadores de
alimentos sólidos y un recipiente para líquidos; además de una pequeña
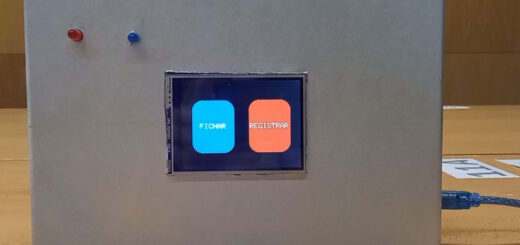
“interfaz” que dispone de una pantalla LCD y dos botones de control.
Mediante los botones se puede seleccionar una de las recetas que viene
programada, tras lo cual se pedirá introducir la cantidad de agua o líquido
necesario y los ingredientes sólidos, convenientemente troceados, en los
recipientes indicados. A partir de ese momento, nuestro programa
funciona de forma autónoma, activando el hornillo mediante un
servomotor, controlando el tiempo de cocción, la temperatura (dispone
de un sensor de humedad y temperatura para controlar posibles fallos) y
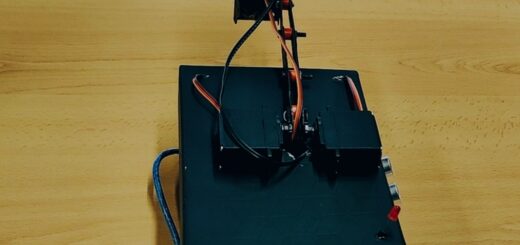
dispensando los ingredientes. Para el líquido utiliza una bomba de agua,
mientras que para los sólidos dispone de una plataforma giratoria, movida
mediante un motor paso a paso y un sistema de trampillas, accionadas
mediante otro servomotor, que permite colocar cada recipiente encima
de la olla (controlándolo mediante un sensor de proximidad que detecta
cuándo cada botella está en la posición adecuada) y volcar la comida.
Etapas de diseño y rectificaciones:
Nuestro primer enfoque pasaba por mover los dispensadores (que
originalmente eran tanto para líquidos como para sólidos) mediante un
sistema de raíles, abriendo y cerrando las botellas con un sistema de
lengüeta accionado por un motor, aunque pronto comprendimos que este
planteamiento podía dar problemas en cuanto al peso de los ingredientes
y la cantidad de motores (y, por tanto, potencia) requerida. En cuanto al
hornillo, la idea original era controlarlo mediante Arduino
completamente, pero tras comprobar que tenía un sistema de resistencias
variables muy complejo (fundiendo un multímetro en el proceso)
decidimos dejarlo estar y controlar simplemente la rueda de temperatura
y encendido/apagado mediante un servomotor, “destopado” para poder
girar 360º.
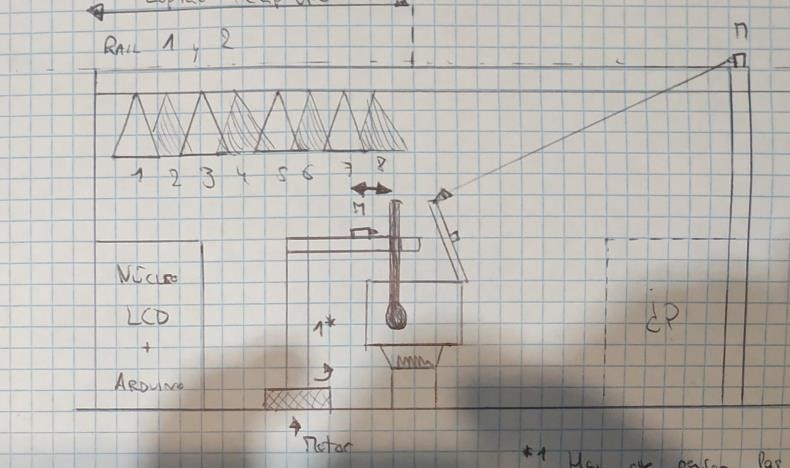
Una vez que decidimos utilizar el método de la plataforma giratoria, a la
que irían pegadas las botellas con los sólidos y que giraría gracias a una
barra de metal unida a un rodamiento por abajo y a un motor paso a paso
por arriba, el sistema que probamos fue combinar esta plataforma
giratoria (sin trampillas) con una fija que tuviera una sola trampilla; de
forma que cuando el recipiente en cuestión se alineara, esta se abriría y
caería el contenido. Sin embargo, este sistema nos daba el problema de
que, por muy pegadas que estuvieran ambas plataformas, la comida
pequeña (lentejas, arroz) se colaba entre ambas y atascaba la trampilla o
dificultaba el giro, además de que el propio rozamiento de una plataforma
y otra hacía muy difícil el movimiento para el motor. En el anteproyecto se
consideró la posibilidad de usar un par de engranajes para proporcionar
dicha fuerza, pero el precio de estos (tanto comprarlos de metal como
imprimirlos en 3D) se salía del presupuesto.
Así pues, nuestro diseño final consiste en una sola plataforma móvil en la
que todos los recipientes tienen su propia trampilla, tensada mediante un
sistema de gomas elásticas y en el que que un único servomotor se va
moviendo sincronizadamente con la plataforma para engancharse a cada
trampilla (mediante una pestaña que tienen estas) y abrirlas. En cuanto al
agua, se optó por una bomba de agua unida a un tubo de riego. Esta
bomba intentó hacerse a mano (mediante tapones), pero, tras varios
intentos fallidos, comprobamos que los motores DC estándar no tenían
fuerza suficiente, por lo que acabamos por comprarla.
Lista de materiales y presupuesto:
(En rojo los materiales que no aparecían en el anteproyecto, en verde los que ya teníamos
nosotros o hemos conseguido gratis, en azul los proporcionados en la caja.)
Placas y circuitería:
Arduino UNO
Controlador de motores Adafruit v1 L293D 2.86€
Pantalla LCD
2 Protoboard (1 incluída)
Interfaz I2C TWI SPI serie 2.06€
Componentes electrónicos:
2 Servomotores 5V 2.84€
Bomba de agua 5V 3.47€
Motor Stepper 5V 4.00€
Sensor de temperatura y humedad DHT11 1.39€
2 resistencias de 10k Ω
2 pulsadores
1 interruptor 0.75€
360 cables 10cm (M-M, M-H y H-H) 10.54€
Sensor de proximidad
Led azul
Batería 9V
Materiales de bricolaje:
Olla de cocina
Hornillo eléctrico
Tablero de madera (plataforma) 80x40cm 5.25€
3 listones de madera gruesa 90cm 8.07€
2 tablas finas de contrachapado 60x30cm 5.38€
Tubo de riego de 5m 8.65€
Barra hueca de aluminio 60cm x 2cm Ø 3.95€
Varilla de madera lisa 1m x 1.5cm Ø 1.79€
Caja de zapatos
6 botellas de agua 50cl 3.42€
Garrafa de agua 5l
1 rodamiento 2cm Ø 6€
4 escuadras 1.00€
6 bisagras 5.00€
Barra pequeña de madera (palillo chino)
Goma elástica 0.75€
Herramientas y utensilios:
Pistola de silicona caliente
5 paquetes de barras de silicona 5€
Martillo, barrena, taladro, sierra, lima, gato, soldador y estaño 2.50€
Chinchetas
Cinta americana, cinta aislante 1.20€ y pegamento “super glue” 3.50€
Multímetro 11.20€
Tijeras, cúter, cuchillo, alicates, pelacables
PRESUPUESTO FINAL: 97.30€

Video explicativo de uso. Demostracion de uso