Proyecto: Parking Inteligente
Autores: Alejandro Jiménez Lázaro, Vicente Valentín Moya Guijarro, Aitor García Camargo
Introducción
Al decantarnos por este proyecto, nuestro objetivo de hacer un parking inteligente es principalmente controlar las plazas disponibles y ocupadas en función de la entrada y salida de vehículos. Nos centramos en 5 funcionalidades, por un lado dos servomotores que actúan de barrera en la entrada y salida del parking. Por otro lado, tenemos una pantalla LCD la cual muestra el número de plazas disponibles y en qué plaza debe aparcar el coche que entra. De forma paralela hemos implementado 6 leds que indican las plazas que están libres cuando están encendidos y ocupadas cuando están apagados. Además, mediante un sensor IR y su respectivo mando, podemos realizar varias funciones pulsando botones. Finalmente hemos incluido 2 sensores HC-SR04 el cual se encarga de detectar un coche cuando pasa por debajo para que actúen las demás funcionalidades(Subir la barrera, apagar o encender un led, actualizar la pantalla LCD).
Materiales y sus costes
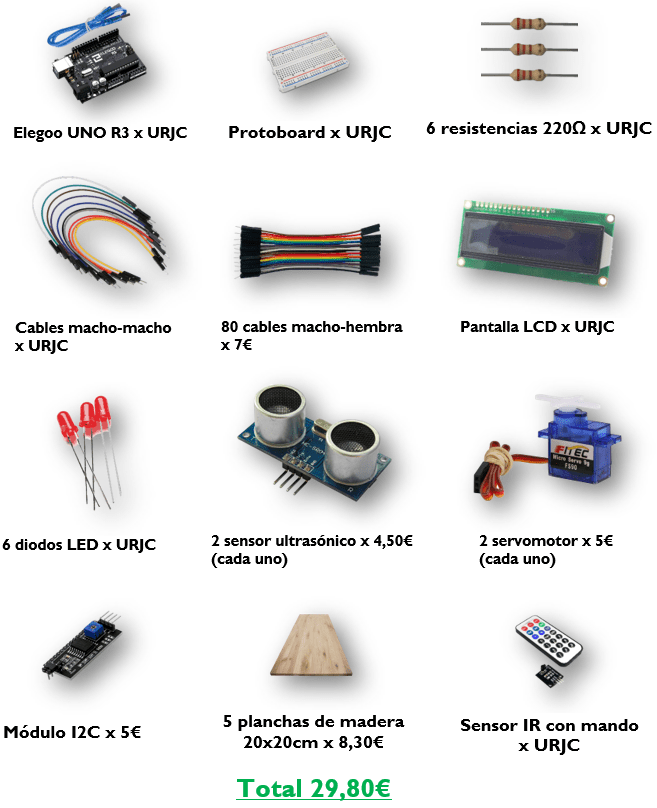
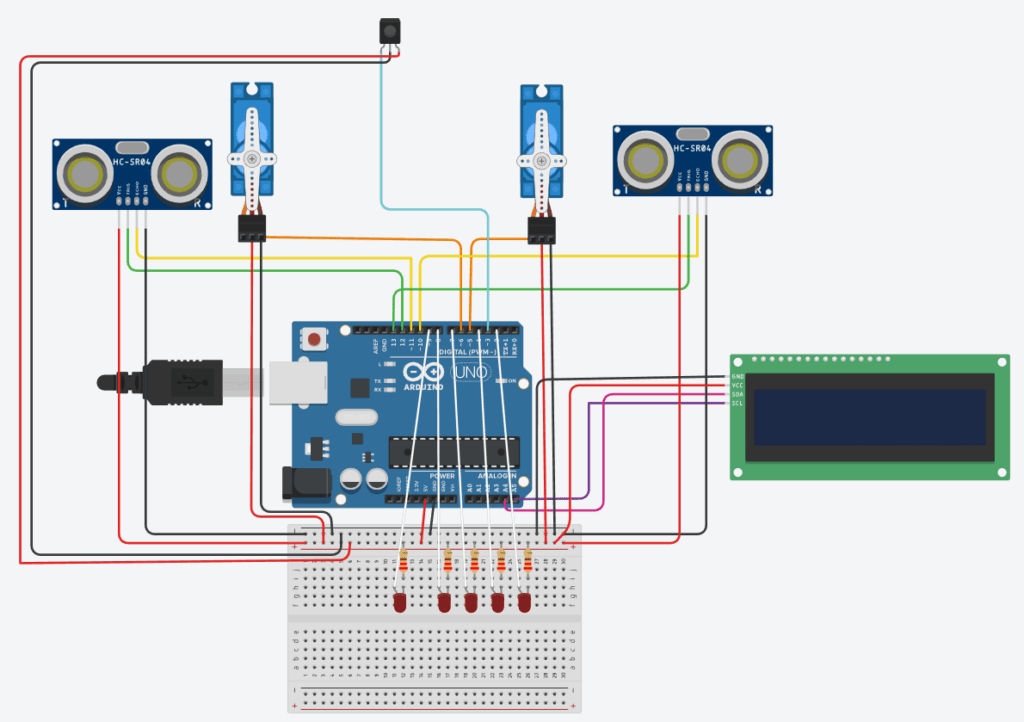
Esquema del Hardware
Proceso de montaje
- En primer lugar, una vez planteado el proyecto en cuestión, se procedió a adquirir las planchas de madera necesarias para la maqueta de lo que sería la estructura básica del parking. Una principal (y la más grande) que haría de suelo, 4 paredes y dos “tejados” para las puertas.
- Posteriormente, se llevó a cabo un recorte rectangular en cada pared del ancho para las puertas de acceso y salida, y junto a las mismas, un boquete reducido para cada servomotor; tres pequeñas perforaciones en cada pared del largo para ubicar los LEDs, y dos agujeros de mayor diámetro en cada techado para los sensores ultrasónicos. Acto seguido, se unieron las 7 planchas aplicando cola blanca en los puntos de anclaje, dejando secar durante 24 horas con sujeción en dichos puntos.
- Una vez completada la estructura, se ubicaron los LED en las paredes laterales, un servomotor en cada puerta, los sensores de ultrasonidos en cada techado, una pantalla LCD con un módulo I2C en el acceso de entrada, y el sensor IR para el mando a distancia. A continuación, se procedió con el cableado de todos los componentes, orientando todos los extremos a un mismo lugar, para finalmente conectarlos a los correspondientes puntos en la protoboard y/o en los pines de la placa de Arduino (Elegoo UNO R3).
- Al tener dispuestas todas las conexiones de los componentes, se comprueba el correcto funcionamiento de cada uno en Arduino conectándolo por separado y empleando un código de testeo. Por último, viendo que cada elemento individualmente marcha de la forma esperada, se elaboró el código definitivo para que el parking cumpliese con las funciones deseadas, y se ejecutó con todos los componentes conectados.
Problemas y soluciones
- Una vez comprados los materiales, caímos en la cuenta de que necesitábamos un sensor por plaza para poder controlar cada coche individualmente (modelo ideal).
- Para solucionarlo, se decidió que la salida del parking sea gestionada manualmente, es decir, como si de un control en la barrera de salida se tratara:
- Se le pregunta al coche saliente de qué plaza proviene, y al darle al sistema esa información
- nos devuelve el tiempo de estancia
- se actualiza el estado de esa plaza, de cara aforo y en el LED.
- Los sensores de ultrasonidos miden la distancia al objeto más cercano a su alcance, con lo cual se consideró oportuno que tuvieran algo fijo a lo que apuntar para cuando pasara un vehículo entre medias, la variación de lectura del sensor lo indicara.
- Para ello, era preciso montar alguna estructura con la que poder realizarlo.
- Se crearon los techados para los ultrasonidos porque eran más estéticos, prácticos y baratos que tener que construir dos paredes en cada acceso.

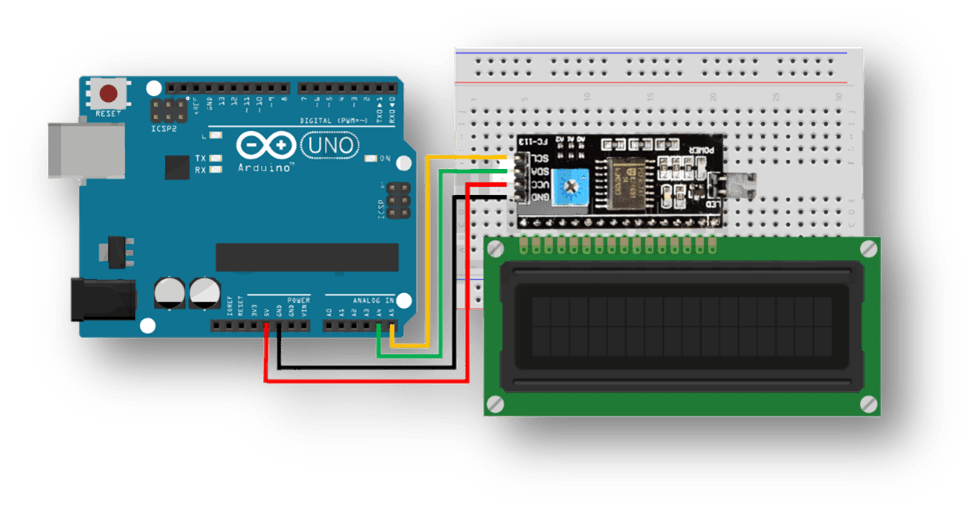
- La pantalla LCD ocupa en la placa de Arduino 6 pines E/S digitales, lo cual complica notoriamente la conexión del resto de componentes del sistema.
- Con la incorporación de un módulo I2C, que hace la función de convertir las 12 entradas/salidas digitales de la pantalla LCD en 2 analógicas en la parte inferior, nos queda mucho libre en la superior, atajando así el problema surgido.
Código
/* Librerías correspondientes a las funcionalidades */
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <Servo.h>
#include <HCSR04.h>
#include "IRremote.h"
/* Cremos los Objetos */
LiquidCrystal_I2C lcd(0x27, 16, 2); //Pantalla LCD
Servo servoE; //2 servos
Servo servoS;
UltraSonicDistanceSensor sensorE(12, 11); //2 sensores
UltraSonicDistanceSensor sensorS(13, 10);
/* Asignación de Pines */
int recividor = 3; //IR receptor en pin 3
int LED1 = 2; //LED 1 en pin 2
//int LED2=3; //LED 2 en pin 3
int LED3 = 4; //LED 3 en pin 4
int LED4 = 7; //LED 4 en pin 7
int LED5 = 8; //LED 5 en pin 8
int LED6 = 9; //LED 6 en pin 9
IRrecv mando(recividor); //Mando
decode_results resultados;
/* Variables para regular el parking */
boolean p[6] = { true, true, true, true, true, true }; //Array de plazas ocupadas
int plazas; //Contador de plazas para llevar la cuenta de cuantas hay libres
int ctr_sitioE; //Controlador del sitio al que tiene que aparcar
int ctr_sitioS; //Controlador del sitio que abandonan
//Variables usadas para regular los tiempos
unsigned long tini1;
unsigned long tini2;
unsigned long tini3;
unsigned long tini4;
unsigned long tini5;
unsigned long tini6;
unsigned long tfin1;
unsigned long tfin2;
unsigned long tfin3;
unsigned long tfin4;
unsigned long tfin5;
unsigned long tfin6;
unsigned long ttotal;
void setup() {
Serial.begin(9600);
mando.enableIRIn(); // Se enciende el recibidor del mando
for (int i = 0; i <= 5; i++) {
p[i] = true; //Inicializamos el array de plazas, todas disponibles
}
plazas = 6; //6 plazas para empezar disponibles
pinMode(LED1, OUTPUT); //Establecemos los leds como salida
//pinMode(LED2,OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED5, OUTPUT);
pinMode(LED6, OUTPUT);
servoE.attach(5); //Servo entrada en pin 5
servoS.attach(6); //Servo salida en pin 6
servoE.write(95); //Colocamos servo de entrada en posición para no dejar pasar
servoS.write(100); //Colocamos servo de salida en posición para no dejar pasar
lcd.init(); //iniciamos la LCD
lcd.backlight(); //Le damos luz
lcd.setCursor(0, 0); //
lcd.print("Plazas libres: "); //En primera línea de LCD escribimos "Plazas libres: 6"
lcd.print(plazas); //
lcd.setCursor(0, 1); //
lcd.print(" Bienvenidos "); // En segunda línea de LCD escribimos "Bienvenidos"
encenderLeds(); //Todos los leds encendidos, ya que todas las plazas están libres al principio
}
void loop() {
/* Seguimiento del mando */
if (mando.decode(&resultados)) {
mando1();
mando.resume();
}
/* Leer los valores de los sensores */
float distanceE = sensorE.measureDistanceCm();
float distanceS = sensorS.measureDistanceCm();
/* Mostramos por la consola de serial los valores leídos por ambos sensores */
Serial.print("Distancia entrada: ");
Serial.print(distanceE);
Serial.print(" / ");
Serial.print("Distancia salida: ");
Serial.println(distanceS);
delay(1000);
/* Funcionalidad de entradas */
if (plazas > 0 && distanceE < 7.00) { //Si hay plazas disponibles y detecta paso de un coche
plazas--;
SubirEntrada();
if (p[0] == true) { //Comprabamos plaza a plaza su disponibilidad
digitalWrite(LED1, LOW);
p[0] = false;
tini1 = millis(); //Obtenemos el momento en el que el coche aparca en la plaza
ctr_sitioE = 1;
} else if (p[1] == true) {
//digitalWrite(LED2, LOW);
p[1] = false;
tini2 = millis();
ctr_sitioE = 2;
} else if (p[2] == true) {
digitalWrite(LED3, LOW);
p[2] = false;
tini3 = millis();
ctr_sitioE = 3;
} else if (p[3] == true) {
digitalWrite(LED4, LOW);
p[3] = false;
tini4 = millis();
ctr_sitioE = 4;
} else if (p[4] == true) {
digitalWrite(LED5, LOW);
p[4] = false;
tini5 = millis();
ctr_sitioE = 5;
} else if (p[5] == true) {
digitalWrite(LED6, LOW);
p[5] = false;
tini6 = millis();
ctr_sitioE = 6;
}
/* Modificaciones de la pantalla lcd */
lcd.setCursor(15, 0); //Muestra las plazas disponibles
lcd.print(plazas);
lcd.setCursor(0, 1);
lcd.print("Aparque en la "); //Indica el sitio en el que debe aparcar
lcd.print(ctr_sitioE);
delay(5000);
lcd.setCursor(0, 1);
lcd.print(" Bienvenidos! ");
BajarEntrada(); //Baja la barrera de la entrada
}
/* Funcionalidad de salidas */
if (plazas < 6 && distanceS < 7.00) {
plazas++;
SubirSalida();
lcd.setCursor(15, 0);
lcd.print(plazas);
delay(5000);
BajarSalida();
}
}
/* Función de gestión del mando */
/* Aquí se implementan todas las funcionalidades que van a tener
cada uno de los botones */
void mando1() {
switch (resultados.value) { //En función del botón que pulsemos, realiza una acción u otra
case 0xFFA25D:
break;
case 0xFFE21D:
break;
case 0xFF629D:
break;
case 0xFF22DD: //Al pulsar el botón de retroceso, sube la barrera de entrada
SubirEntrada();
break;
case 0xFF02FD:
break;
case 0xFFC23D: //Al pulsar el botón de avanzar, sube la barrera de salida
SubirSalida();
break;
case 0xFFE01F: //Al pulsar el botón de bajar, baja la barrera de entrada
BajarEntrada();
break;
case 0xFFA857:
break;
case 0xFF906F: //Al pulsar el botón de subir, baja la barrera de salida
BajarSalida();
break;
case 0xFF9867: //Al pulsar el botón EQ, se reinicia el parking
encenderLeds();
servoE.write(95);
servoS.write(100);
plazas = 6;
for (int i = 0; i <= 5; i++) {
p[i] = true;
}
lcd.setCursor(0, 0);
lcd.print("Plazas libres: ");
lcd.print(plazas);
lcd.setCursor(0, 1);
lcd.print(" Bienvenidos ");
break;
case 0xFFB04F:
break;
case 0xFF6897:
break;
case 0xFF30CF: //Al pulsar el botón 1, decidimos que el coche abandona la posición 1
if (p[0] == false) { //Comprobación de que la plaza esté ocupada
digitalWrite(LED1, HIGH);
p[0] = true;
ctr_sitioS = 1;
Serial.print("Ha quedado libre la plaza ");
Serial.print(ctr_sitioS);
Serial.print("\n");
tfin1 = millis(); //Tiempo en el que se abandona el parking
imprimirTiempoTranscurrido();
ticketSerial();
} else {
Serial.print("La plaza no esta ocupada\n");
}
break;
case 0xFF18E7: //Al pulsar el botón 2, decidimos que el coche abandona la posición 2
if (p[1] == false) {
//digitalWrite(LED2, HIGH);
p[1] = true;
ctr_sitioS = 2;
Serial.print("Ha quedado libre la plaza ");
Serial.print(ctr_sitioS);
Serial.print("\n");
tfin2 = millis();
//ttotal= tfin2 - tini2;
imprimirTiempoTranscurrido();
ticketSerial();
} else {
Serial.print("La plaza no esta ocupada\n");
}
break;
case 0xFF7A85: //Al pulsar el botón 3, decidimos que el coche abandona la posición 3
if (p[2] == false) {
digitalWrite(LED3, HIGH);
p[2] = true;
ctr_sitioS = 3;
Serial.print("Ha quedado libre la plaza ");
Serial.print(ctr_sitioS);
Serial.print("\n");
tfin3 = millis();
imprimirTiempoTranscurrido();
ticketSerial();
} else {
Serial.print("La plaza no esta ocupada\n");
}
break;
case 0xFF10EF: //Al pulsar el botón 4, decidimos que el coche abandona la posición 4
if (p[3] == false) {
digitalWrite(LED4, HIGH);
p[3] = true;
ctr_sitioS = 4;
Serial.print("Ha quedado libre la plaza ");
Serial.print(ctr_sitioS);
Serial.print("\n");
tfin4 = millis();
imprimirTiempoTranscurrido();
ticketSerial();
} else {
Serial.print("La plaza no esta ocupada\n");
}
break;
case 0xFF38C7: //Al pulsar el botón 5, decidimos que el coche abandona la posición 5
if (p[4] == false) {
digitalWrite(LED5, HIGH);
p[4] = true;
ctr_sitioS = 5;
Serial.print("Ha quedado libre la plaza ");
Serial.print(ctr_sitioS);
Serial.print("\n");
tfin5 = millis();
imprimirTiempoTranscurrido();
ticketSerial();
} else {
Serial.print("La plaza no esta ocupada\n");
}
break;
case 0xFF5AA5: //Al pulsar el botón 6, decidimos que el coche abandona la posición 6
if(p[5]==false){
digitalWrite(LED6, HIGH);
p[5] = true;
ctr_sitioS = 6;
Serial.print("Ha quedado libre la plaza ");
Serial.print(ctr_sitioS);
Serial.print("\n");
tfin6 = millis();
imprimirTiempoTranscurrido();
ticketSerial();
}
else {
Serial.print("La plaza no esta ocupada\n");
}
break;
case 0xFF42BD:
break;
case 0xFF4AB5:
break;
case 0xFF52AD:
break;
case 0xFFFFFFFF:
break;
}
delay(500);
}
/* Función para encender todos los leds */
void encenderLeds() {
digitalWrite(LED1, HIGH);
//digitalWrite(LED2, HIGH);
digitalWrite(LED3, HIGH);
digitalWrite(LED4, HIGH);
digitalWrite(LED5, HIGH);
digitalWrite(LED6, HIGH);
}
/* Función de subir la entrada */
/* Esta función sube la barrera de la entrada despacio
subiendola un grado cada 10 ms */
void SubirEntrada() {
for (int pos = 95; pos <= 180; pos += 1) {
servoE.write(pos);
delay(10);
}
}
/* Función de bajar la entrada */
/* Esta función baja la barrera de la entrada despacio
bajandola un grado cada 10 ms */
void BajarEntrada() {
for (int pos = 180; pos >= 95; pos -= 1) {
servoE.write(pos);
delay(10);
}
}
/* Función de subir la salida */
/* Esta función sube la barrera de la salida despacio
subiéndola un grado cada 10 ms */
void SubirSalida() {
for (int pos = 100; pos <= 180; pos += 1) {
servoS.write(pos);
delay(10);
}
}
/* Función de bajar la salida */
/* Esta función baja la barrera de la salida despacio
bajandola un grado cada 10 ms */
void BajarSalida() {
for (int pos = 180; pos >= 100; pos -= 1) {
servoS.write(pos);
delay(10);
}
}
/* Función de mostrar tiempo */
/* Esta función se encarga de calcular el tiempo final
que se usa una plaza concreta y a su vez imprime en la
consola de Serial su valor expresado en segundos */
void imprimirTiempoTranscurrido() {
switch (ctr_sitioS) {
case 1:
ttotal = tfin1 - tini1;
break;
case 2:
ttotal = tfin2 - tini2;
break;
case 3:
ttotal = tfin3 - tini3;
break;
case 4:
ttotal = tfin4 - tini4;
break;
case 5:
ttotal = tfin5 - tini5;
break;
case 6:
ttotal = tfin6 - tini6;
break;
}
Serial.print("La plaza ");
Serial.print(ctr_sitioS);
Serial.print(" ha sido ocupada durante ");
Serial.print(ttotal / 1000);
}
/* Función que genera un ticket mostrado por consola */
/* Esta función genera un ticket con los datos de la plaza,
el tiempo, y el precio que le costaría al conductor.
Todo esto se muestra en la consola de Serial */
void ticketSerial() {
unsigned long precioSEG = ttotal * 0.5;
Serial.print("\n ******************* \n");
Serial.print(" TICKET \n\n Plaza ocupada: ");
Serial.print(ctr_sitioS);
Serial.print("\n Tiempo ocupada: ");
Serial.print(ttotal / 1000);
Serial.print("\n ---------------- \n Total a pagar: ");
Serial.print(precioSEG / 1000);
Serial.print("\n ******************* \n");
}
