Empotragancho
Empotragancho
Grupo 1 – Moisés García
Jorge García
Isabel Hernández

1. Introducción
Nuestro
proyecto para la asignatura Sistemas empotrados consiste en un brazo robotizado
con pinzas que simula una máquina de feria llamada el “Empotragancho” que consistirá
en que el jugador maneje el robot pudiendo coger lo que el cliente desee.
proyecto para la asignatura Sistemas empotrados consiste en un brazo robotizado
con pinzas que simula una máquina de feria llamada el “Empotragancho” que consistirá
en que el jugador maneje el robot pudiendo coger lo que el cliente desee.
2. Presupuesto
Tipo |
Foto |
Precio |
Kit básico Brazo Robótico:
– Placa Arduino
– Placa base
– Jumpers
– Partes Robot
– Servos motores (x4) |
 |
42 € |
Cables Jumpers extras |
 |
12 € |
Pilas de petaca (x3) |
 |
4.25 € |
Potenciómetros (x5) |
 |
5 € |
Servos motores extras (x2) |
 |
6 € |
Caja cartón |
 |
6 € |
Pintura |
 |
5 € |
Herramientas |
0 € |
|
Pistola termofusible |
0 € |
|
Material proporcionado |
 |
0€ |
3. Implementación
En un
primer momento comenzamos con todo el proceso de construcción de la caja, ya
que el brazo robótico nos lo enviaron desde Alemania y tardó más tiempo del que
esperábamos. Realizamos el diseño que teníamos en mente y procedimos a realizar
los cortes y a darle varias capas de pintura.
primer momento comenzamos con todo el proceso de construcción de la caja, ya
que el brazo robótico nos lo enviaron desde Alemania y tardó más tiempo del que
esperábamos. Realizamos el diseño que teníamos en mente y procedimos a realizar
los cortes y a darle varias capas de pintura.


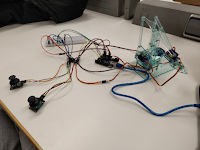
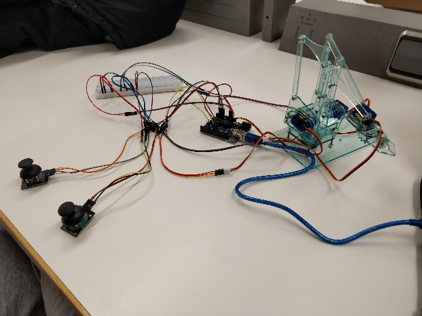
Una vez realizada la caja y con el brazo robótico en
nuestro taller, comenzamos a montarlo, algo que fue complicado debido a la
difícil lectura de las instrucciones y al tamaño de los elementos.


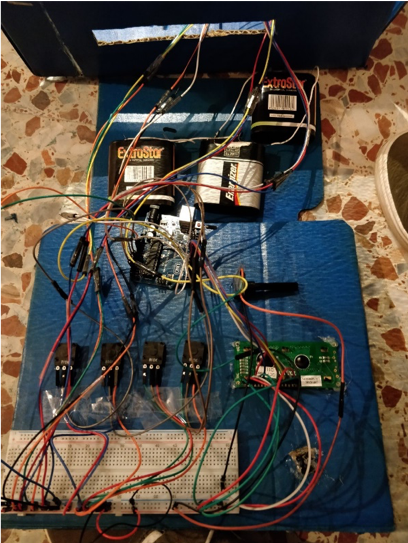
Con la estructura del brazo robótico ya montada, nos pusimos
con la parte de la electrónica. Primero intentamos realizar el control de las
direcciones con los joysticks incorporados en nuestro kit, sin embargo los
desechamos debido a la mala funcionalidad de los mismo y los sustituimos por 4
potenciómetros.

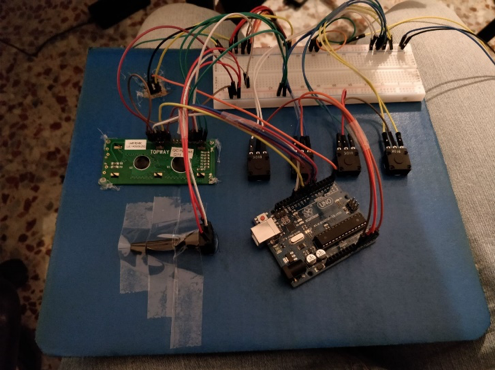
 Comenzamos primero montando todo el equipamiento de los
Comenzamos primero montando todo el equipamiento de los
servomotores con sus potenciómetros. Posteriormente probamos unicamente la
pantalla LCD y por último, insertamos ambos circuitos.

con la parte de la electrónica. Primero intentamos realizar el control de las
direcciones con los joysticks incorporados en nuestro kit, sin embargo los
desechamos debido a la mala funcionalidad de los mismo y los sustituimos por 4
potenciómetros.

servomotores con sus potenciómetros. Posteriormente probamos unicamente la
pantalla LCD y por último, insertamos ambos circuitos.
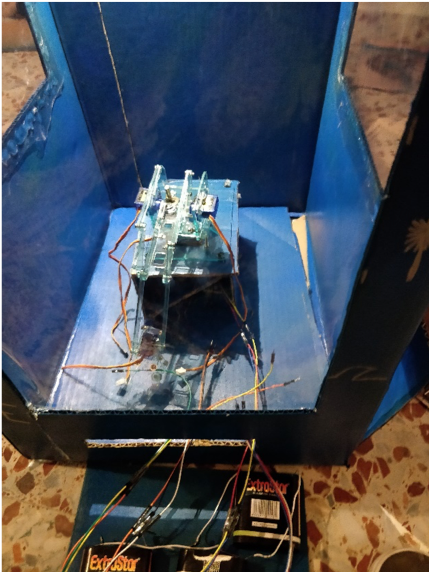
Después
de realizar muchas pruebas hasta dar con el código correcto, conseguimos que
nuestro brazo robótico funcionase. Ya viendo que funcionaba pudimos incluirlo
en la caja y hacer las últimas pruebas.

de realizar muchas pruebas hasta dar con el código correcto, conseguimos que
nuestro brazo robótico funcionase. Ya viendo que funcionaba pudimos incluirlo
en la caja y hacer las últimas pruebas.
4.
Funcionamiento
Nuestro
brazo robótico “Empotragancho” funciona de la siguiente manera:
brazo robótico “Empotragancho” funciona de la siguiente manera:
–
Lo
primero que hacemos es subir el código a la placa de Arduino UNO, en ese
momento se iniciará un contador en la pantalla LCD de 50 segundos además de
ponerse el brazo robótico en la posición inicial marca por los potenciómetros.
Lo
primero que hacemos es subir el código a la placa de Arduino UNO, en ese
momento se iniciará un contador en la pantalla LCD de 50 segundos además de
ponerse el brazo robótico en la posición inicial marca por los potenciómetros.
–
A
continuación, el brazo robótico responderá a los diferentes movimientos que se
pueden hacer por parte del jugador. El brazo robótico consta de 4 servomotores
controlados estos por 4 potenciómetros, cada potenciómetro controla un servo.
Los movimientos que se podrán realizar con estos servos serán los de mover la
base 180º, elevar el brazo, alargar el brazo y abrir y cerrar la pinza.
Mientras tanto, por la pantalla LCD se mostrará el tiempo que le queda al
jugador para poder usar el brazo.
A
continuación, el brazo robótico responderá a los diferentes movimientos que se
pueden hacer por parte del jugador. El brazo robótico consta de 4 servomotores
controlados estos por 4 potenciómetros, cada potenciómetro controla un servo.
Los movimientos que se podrán realizar con estos servos serán los de mover la
base 180º, elevar el brazo, alargar el brazo y abrir y cerrar la pinza.
Mientras tanto, por la pantalla LCD se mostrará el tiempo que le queda al
jugador para poder usar el brazo.
–
Por
último, cuando el temporizador de la pantalla LCD llegue a 0 se mostrará un
mensaje de tiempo agotado y a partir de ese momento todo movimiento realizado
por el jugador no provocará ninguna reacción en el robot ya que éste queda
paralizado.
Por
último, cuando el temporizador de la pantalla LCD llegue a 0 se mostrará un
mensaje de tiempo agotado y a partir de ese momento todo movimiento realizado
por el jugador no provocará ninguna reacción en el robot ya que éste queda
paralizado.
5. Problemas
Los problemas
principales (no contaremos aquí errores o problemas con el código) han sido los
siguientes:
1 El brazo solicitado al fabricante era demasiado pequeño en comparación
con la caja que habíamos diseñado. La solución implementada fue la de reducir
las dimensiones de la caja adaptándolas a las medidas de nuestro brazo robótico.
2 Al
ser de plástico algunas de nuestras piezas, estas se quebraron, teniendo que
ser reemplazadas por otras piezas sobrantes o en su defecto se hicieron
arreglos con celo y cartón.
 A
A
la hora de poner en funcionamiento nuestro brazo robótico, los servos no eran
capaces de mover las piezas correspondientes. Esto se debía a dos
inconvenientes: por un lado, los servomotores junto con la placa LCD consumían
demasiada energía como para poder alimentarse solo a través del ordenador. Esto
nos obligó a conectarlo a la red y colocarle tres pilas de petaca de 4.5 V en
serie. Por otro lado, algunos tornillos los habíamos apretado con demasiada
fuerza, por lo que impedían el giro de las articulaciones.
Los
potenciómetros cuentan con un ruido debido a su inestabilidad que al trasladar
las lecturas a los servomotores a través de la placa de Arduino provocaba una
fuerte inestabilidad en estos con movimientos esporádicos. Esto se solucionó
fijando bien los potenciómetros al tablero.
principales (no contaremos aquí errores o problemas con el código) han sido los
siguientes:
con la caja que habíamos diseñado. La solución implementada fue la de reducir
las dimensiones de la caja adaptándolas a las medidas de nuestro brazo robótico.
ser de plástico algunas de nuestras piezas, estas se quebraron, teniendo que
ser reemplazadas por otras piezas sobrantes o en su defecto se hicieron
arreglos con celo y cartón.
la hora de poner en funcionamiento nuestro brazo robótico, los servos no eran
capaces de mover las piezas correspondientes. Esto se debía a dos
inconvenientes: por un lado, los servomotores junto con la placa LCD consumían
demasiada energía como para poder alimentarse solo a través del ordenador. Esto
nos obligó a conectarlo a la red y colocarle tres pilas de petaca de 4.5 V en
serie. Por otro lado, algunos tornillos los habíamos apretado con demasiada
fuerza, por lo que impedían el giro de las articulaciones.
potenciómetros cuentan con un ruido debido a su inestabilidad que al trasladar
las lecturas a los servomotores a través de la placa de Arduino provocaba una
fuerte inestabilidad en estos con movimientos esporádicos. Esto se solucionó
fijando bien los potenciómetros al tablero.
6. Posibles mejoras
Dentro
de las posibles mejoras que hemos pensado implementar en nuestro proyecto de
cara a un futuro se encuentran las siguientes:
de las posibles mejoras que hemos pensado implementar en nuestro proyecto de
cara a un futuro se encuentran las siguientes:
·
Proveer
de una mayor potencia al brazo robótico. Los movimientos de los servomotores
podrían estar más definidos y la placa se iluminaría mejor si nuestro brazo
robótico contase con una fuente de potencia mayor. Por eso en un futuro
sustituiremos las pilas de petaca de 4.5 V por fuentes de potencia variables.
Proveer
de una mayor potencia al brazo robótico. Los movimientos de los servomotores
podrían estar más definidos y la placa se iluminaría mejor si nuestro brazo
robótico contase con una fuente de potencia mayor. Por eso en un futuro
sustituiremos las pilas de petaca de 4.5 V por fuentes de potencia variables.
·
Colocar
un pulsador que reinicie el brazo robótico cuando se acabe el tiempo. Así no
habrá que volver a ejecutar el código cada vez que deseemos volver a ponerlo en
marcha.
Colocar
un pulsador que reinicie el brazo robótico cuando se acabe el tiempo. Así no
habrá que volver a ejecutar el código cada vez que deseemos volver a ponerlo en
marcha.
·
Iniciar
el brazo robótico a través de un sensor de movimiento. La idea es que se
inserte una moneda en una ranura del tablero, este movimiento será leído por un
sensor de movimiento que iniciará el juego.
Iniciar
el brazo robótico a través de un sensor de movimiento. La idea es que se
inserte una moneda en una ranura del tablero, este movimiento será leído por un
sensor de movimiento que iniciará el juego.
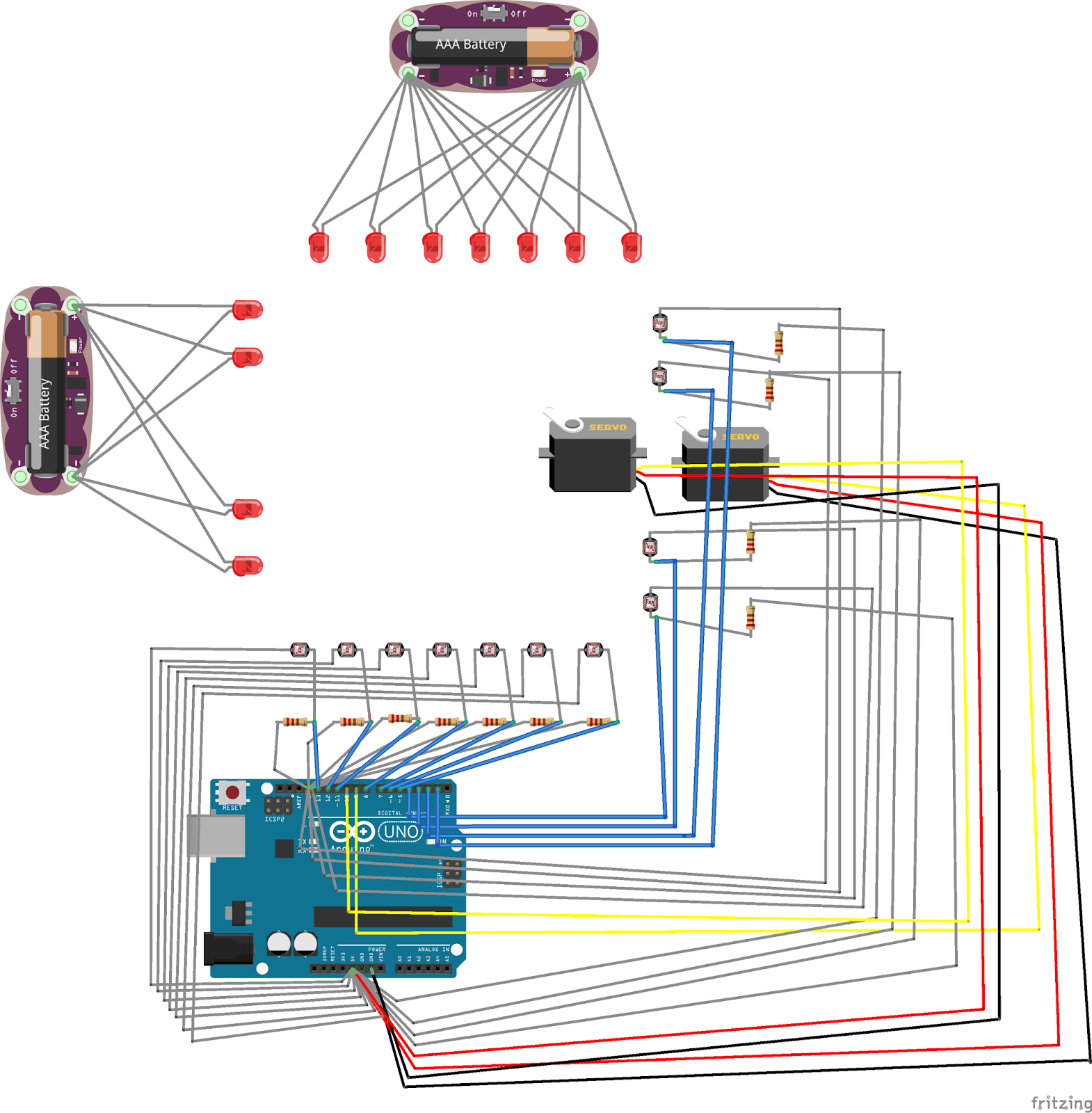
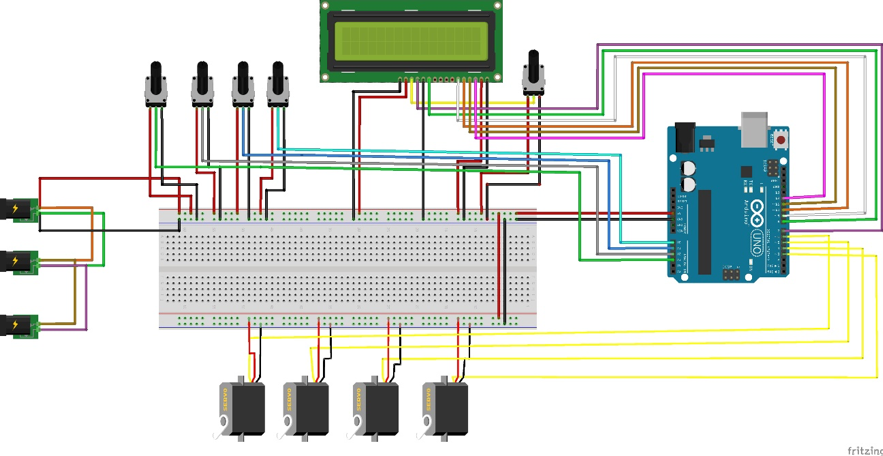
7. Esquema del circuito
8. Conclusiones
El
“Empotragancho” ha sido diseñado principalmente como instrumento de diversión.
Nuestro comprador podrá colocar en el interior de la caja todo aquello que
quiera que el público gane. Con la mejora del sensor de movimiento conseguiremos
además que sirva como fuente de recaudación.
“Empotragancho” ha sido diseñado principalmente como instrumento de diversión.
Nuestro comprador podrá colocar en el interior de la caja todo aquello que
quiera que el público gane. Con la mejora del sensor de movimiento conseguiremos
además que sirva como fuente de recaudación.
A
través de este proyecto hemos podido poner en práctica nuestros conocimientos
acerca de la asignatura de Sistemas Empotrados y de Tiempo Real, conociendo más
profundamente el código Arduino y familiarizándonos con todos los instrumentos
que podemos utilizar con este lenguaje (servomotores, potenciómetros, pantalla
LCD,…).
través de este proyecto hemos podido poner en práctica nuestros conocimientos
acerca de la asignatura de Sistemas Empotrados y de Tiempo Real, conociendo más
profundamente el código Arduino y familiarizándonos con todos los instrumentos
que podemos utilizar con este lenguaje (servomotores, potenciómetros, pantalla
LCD,…).
Hemos
potenciado también nuestras habilidades comunicativas pues este trabajo ha sido
desarrollado entre los tres miembros equitativamente, siendo necesario quedar
durante varios días en la casa de uno de los integrantes y en las salas de la
Biblioteca. Así mismo hemos utilizado la aplicación WhatsApp para una mayor
comunicación.
potenciado también nuestras habilidades comunicativas pues este trabajo ha sido
desarrollado entre los tres miembros equitativamente, siendo necesario quedar
durante varios días en la casa de uno de los integrantes y en las salas de la
Biblioteca. Así mismo hemos utilizado la aplicación WhatsApp para una mayor
comunicación.
Presentación
Código fuente
Video demostración
Acceso a la memoria formato PDF