Carrera de caballos “ARDUINO HORSE RACING”
Grupo 1: Víctor Cortinas Ruiz – Marco Cerejido Gutiérrez – Javier Haering Hijón
Índice
- Introducción
- Materiales usados y precios
- Montaje
- Código
- Problemas y soluciones
- Conclusión
Introducción
Al mismo comienzo de la asignatura, se nos planteó la tarea de realizar un proyecto con arduino para presentar a final del curso. Tras debatir y consultar con el profesor sobre varios proyectos finalmente nos decidimos a realizar una maqueta en donde sobre ella se lleve a cabo una carrera de caballos. Dicha carrera consiste en el encendido de 5 luces led mediante la pulsación de un botón, cuando las luces se apaguen darán paso al movimiento de tres caballos, se elige aleatoriamente el caballo que se va a mover y este se mueve una rotación de motor hacia delante en línea recta. Cuando un caballo llegue a la meta tras 5 movimientos este será el ganador y se dará por concluida la carrera, además se verá por la salida del display la información del caballo (que caballo ha ganado, cuánto tiempo ha tardado y la nacionalidad del caballo). Posteriormente comenzará a sonar el himno del país del caballo ganador y se elevará la bandera del país de dicho ganador. Finalmente se deberá pulsar otro botón para reiniciar el proceso y que los caballos vuelvan a la posición de salida para la siguiente carrera.

Materiales usados y precios
En cuanto al uso de materiales se nos proporcionó un kit de arduino por lo que todo lo incluido en este kid no nos generó ningún costo, tampoco lo hizo la madera que hemos necesitado pues se consiguió de forma gratuita gracias a un familiar de uno de los integrantes del grupo. A continuación detallamos todos los componentes usados y el costo tanto por componente extra como el costo total de estos componentes extras requeridos:
| Nombre | Foto | Cantidad | Precio por unidad |
| Stepper Motor | 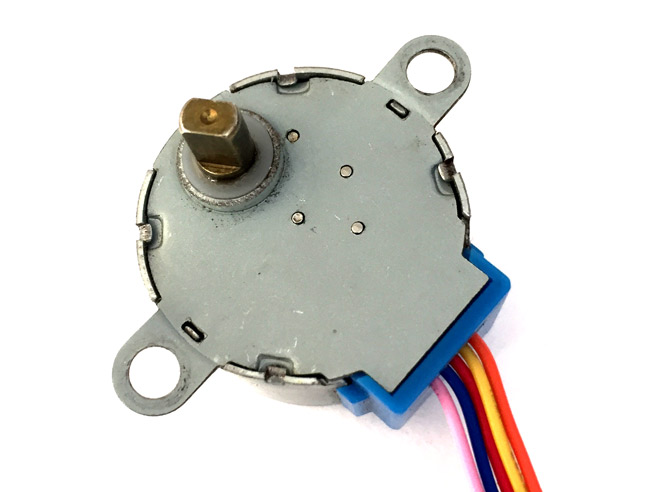 | 3 | Proporcionado por la universidad (0,99 €) |
| ULN2003 Stepper Motor Driver Module | 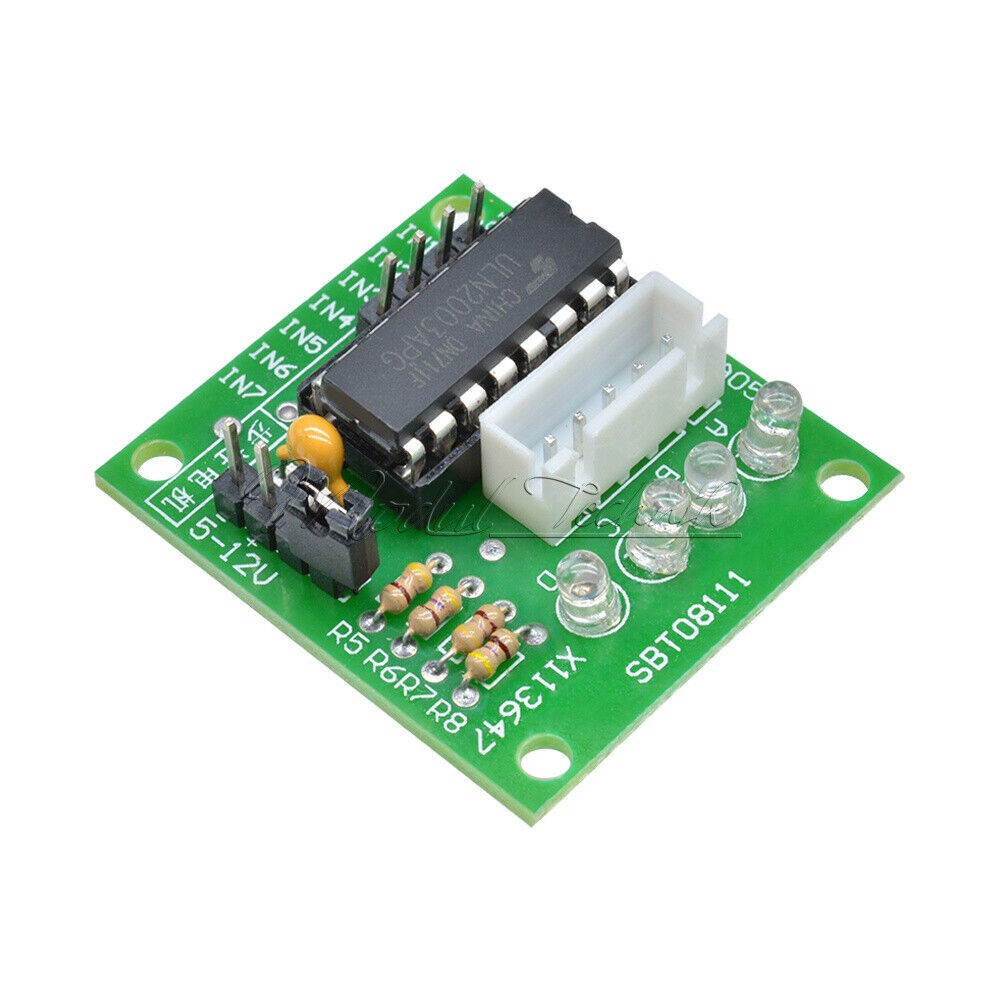 | 3 | Proporcionado por la universidad |
| Servo Motor SG90 |  | 3 | Proporcionado por la universidad (0,62 €) |
| 830 Tie-point Breadboard | 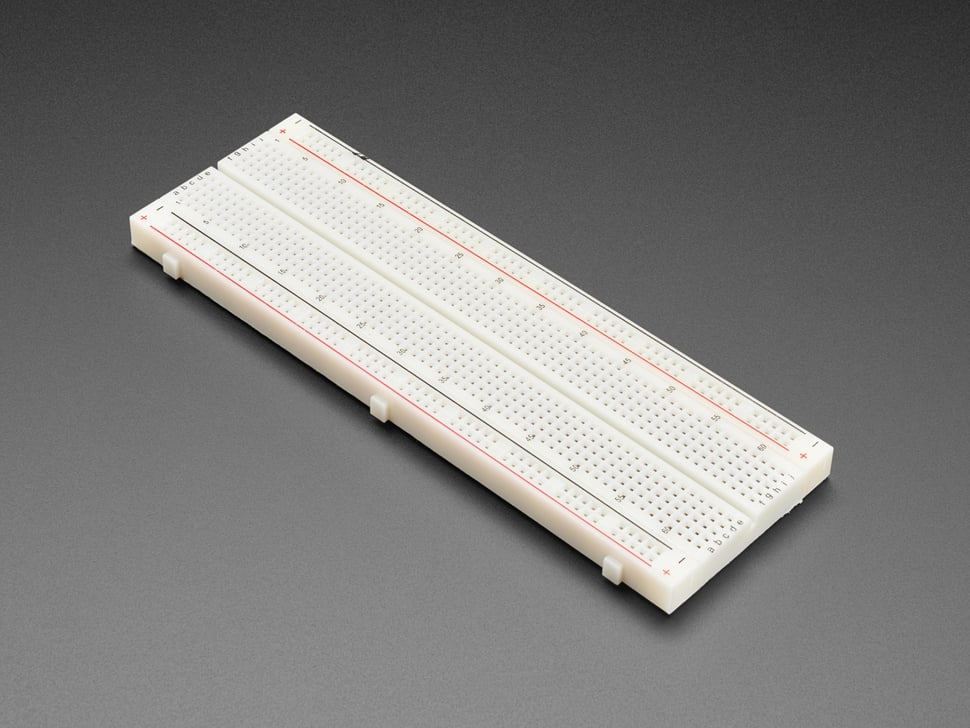 | 3 | Proporcionado por la universidad(3 €) |
| LCD 1602 Module | 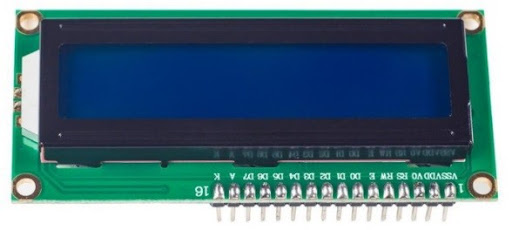 | 1 | Proporcionado por la universidad(0,82 €) |
| Button | 2 | Proporcionado por la universidad(0,15 €) | |
| Active buzzer |  | 1 | Proporcionado por la universidad(1,37 €) |
| Potenciómetro 10K |  | 1 | Proporcionado por la universidad (1,55 €) |
| LED Rojo | 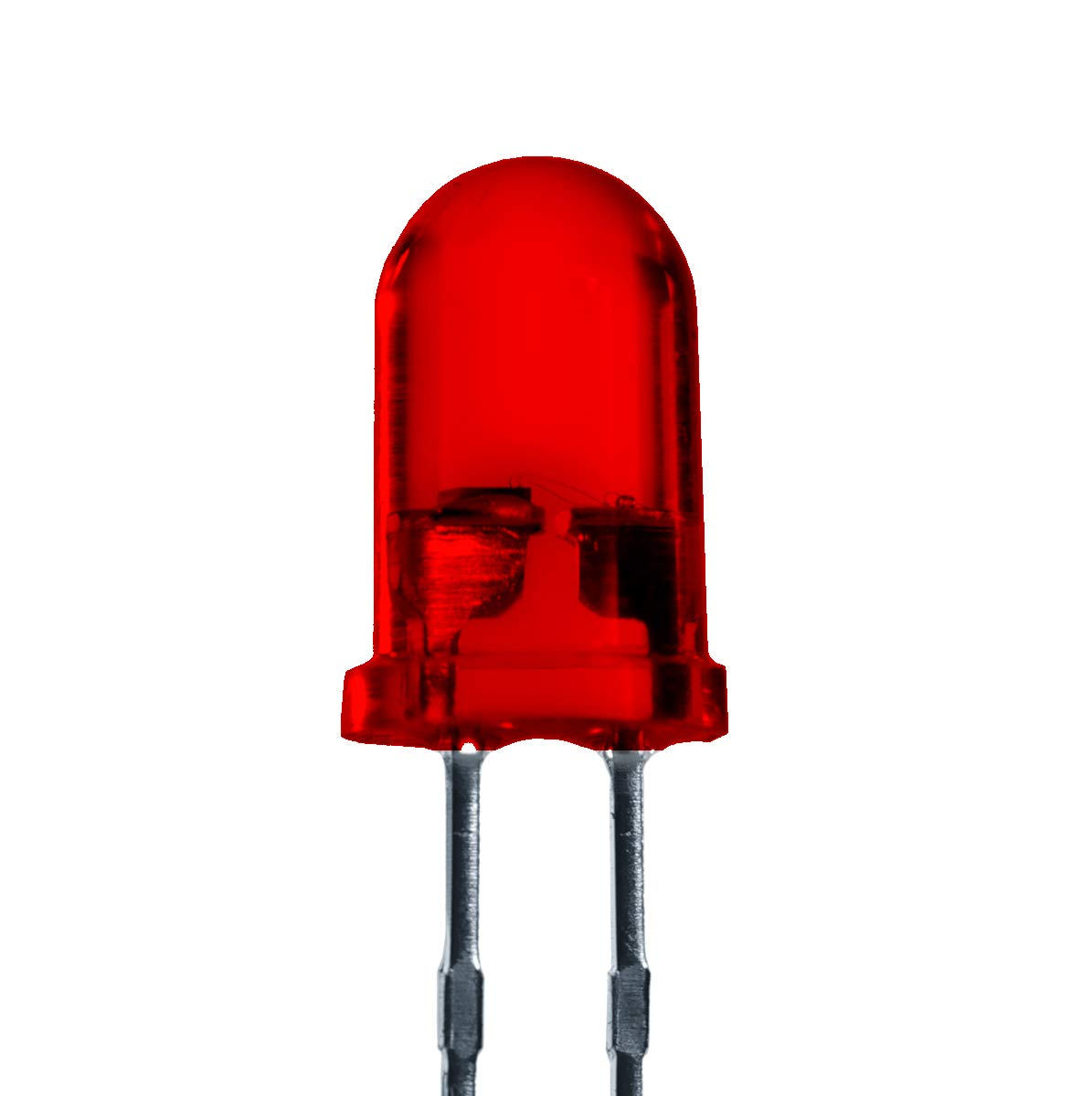 | 5 | Proporcionado por la universidad (0,15 €) |
| Arduino Mega | 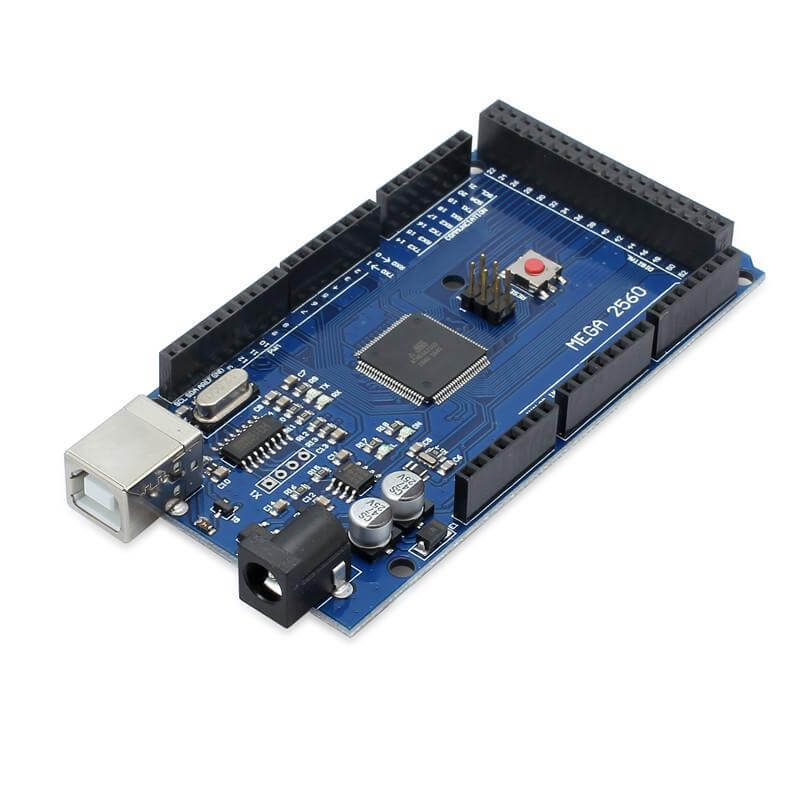 | 1 | 25,99 € |
| Cables |  | 50 | Proporcionado por la universidad (0,12 €) |
| Piezas de madera |  | 10 | Gratis |
| Pila 9V |  | 1 | 2,42 |
Montaje
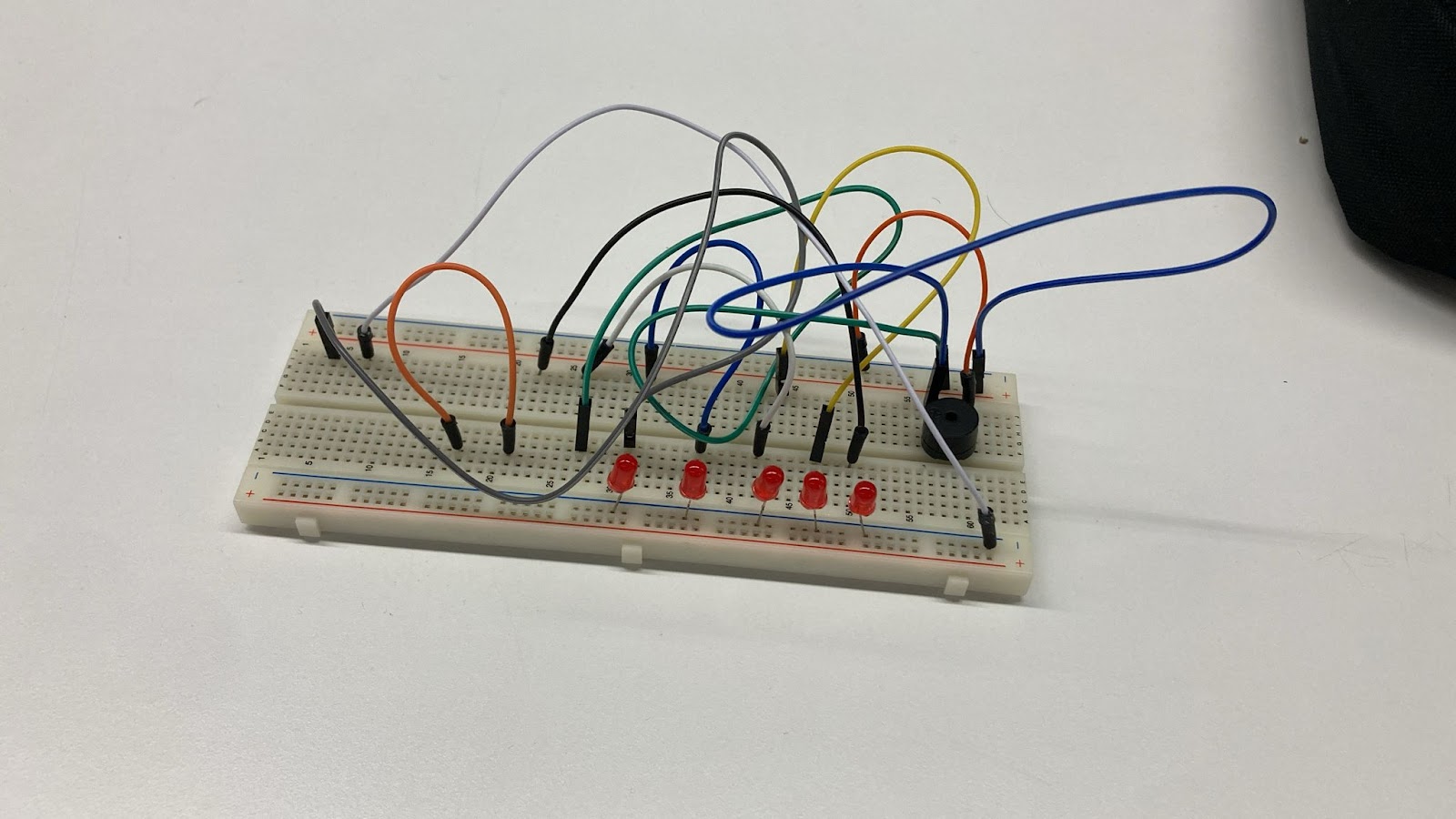
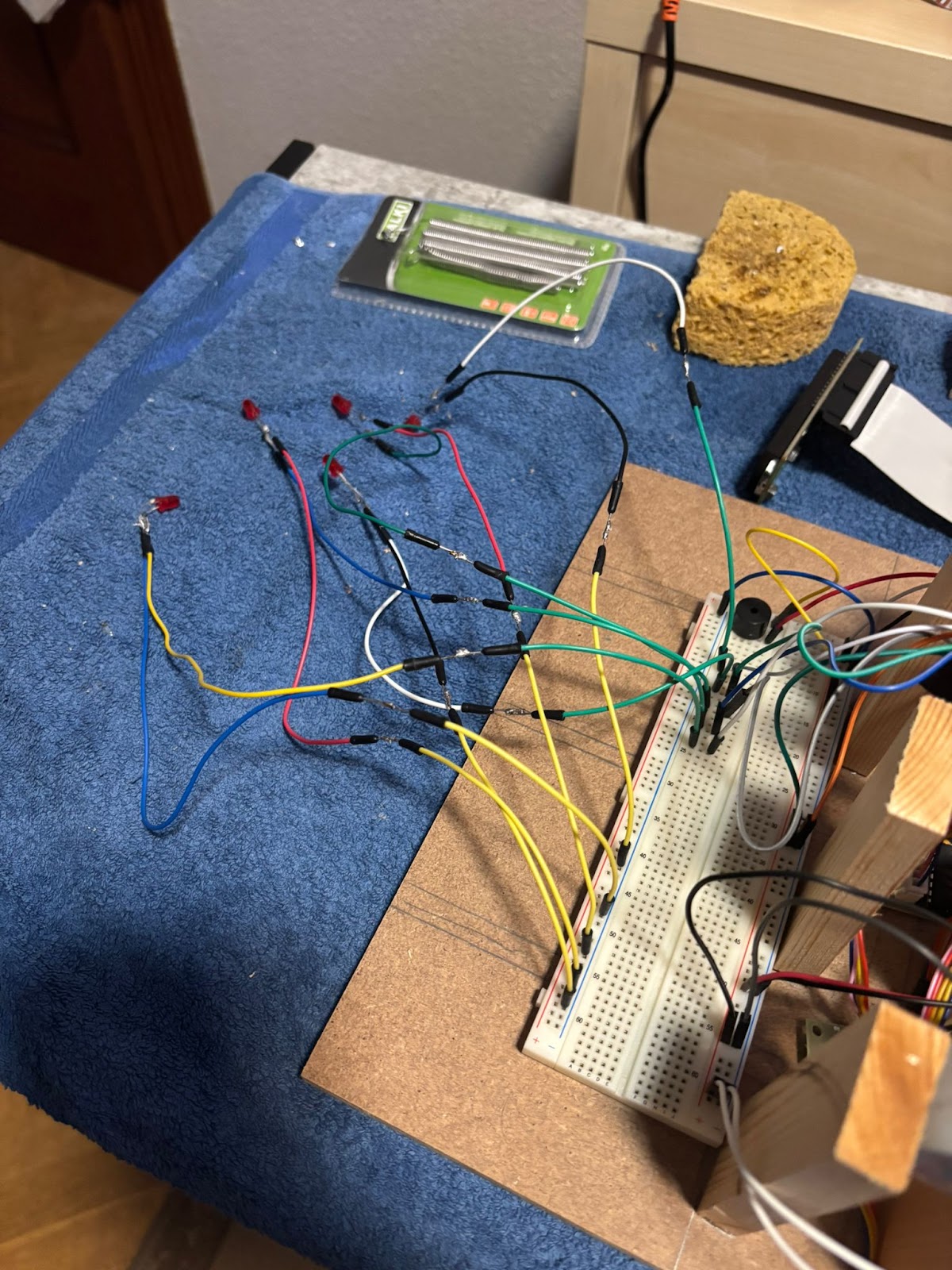
Para realizar el montaje decidimos hacerlo por partes, es decir fuimos probando las funcionalidades por separado, primero montamos en una protoboard los leds y el buzzer los programamos para que se encendieran como un semáforo de la Fórmula 1 y después probamos que el buzzer funcionase haciendo sonar el himno de España.
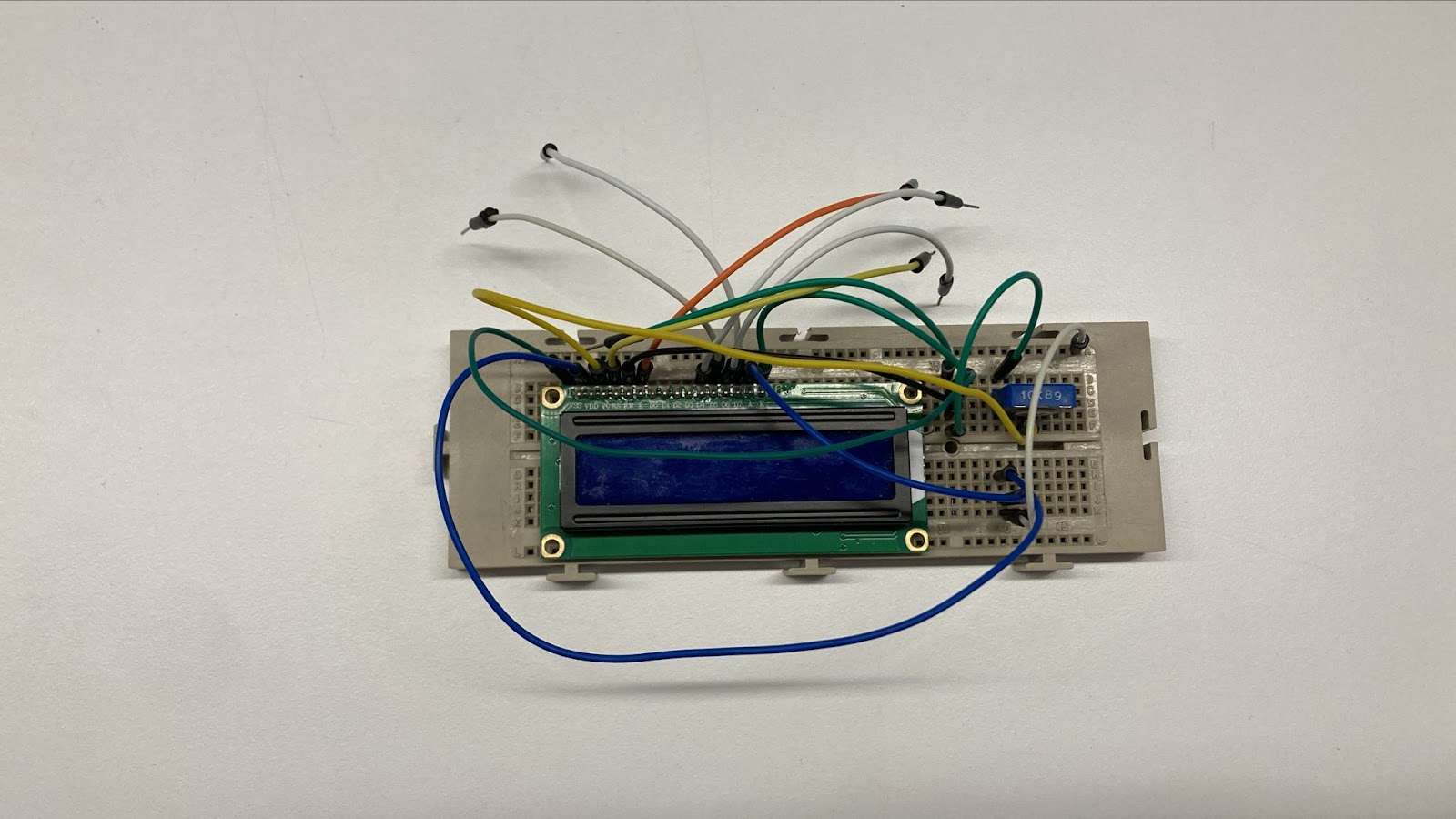
Después nos pusimos a montar y programar el display con un potenciómetro para regular el brillo del display, conseguimos hacer que funcione y que mostrara por pantalla el caballo ganador, el tiempo que ha tardado en llegar a meta y su nacionalidad.
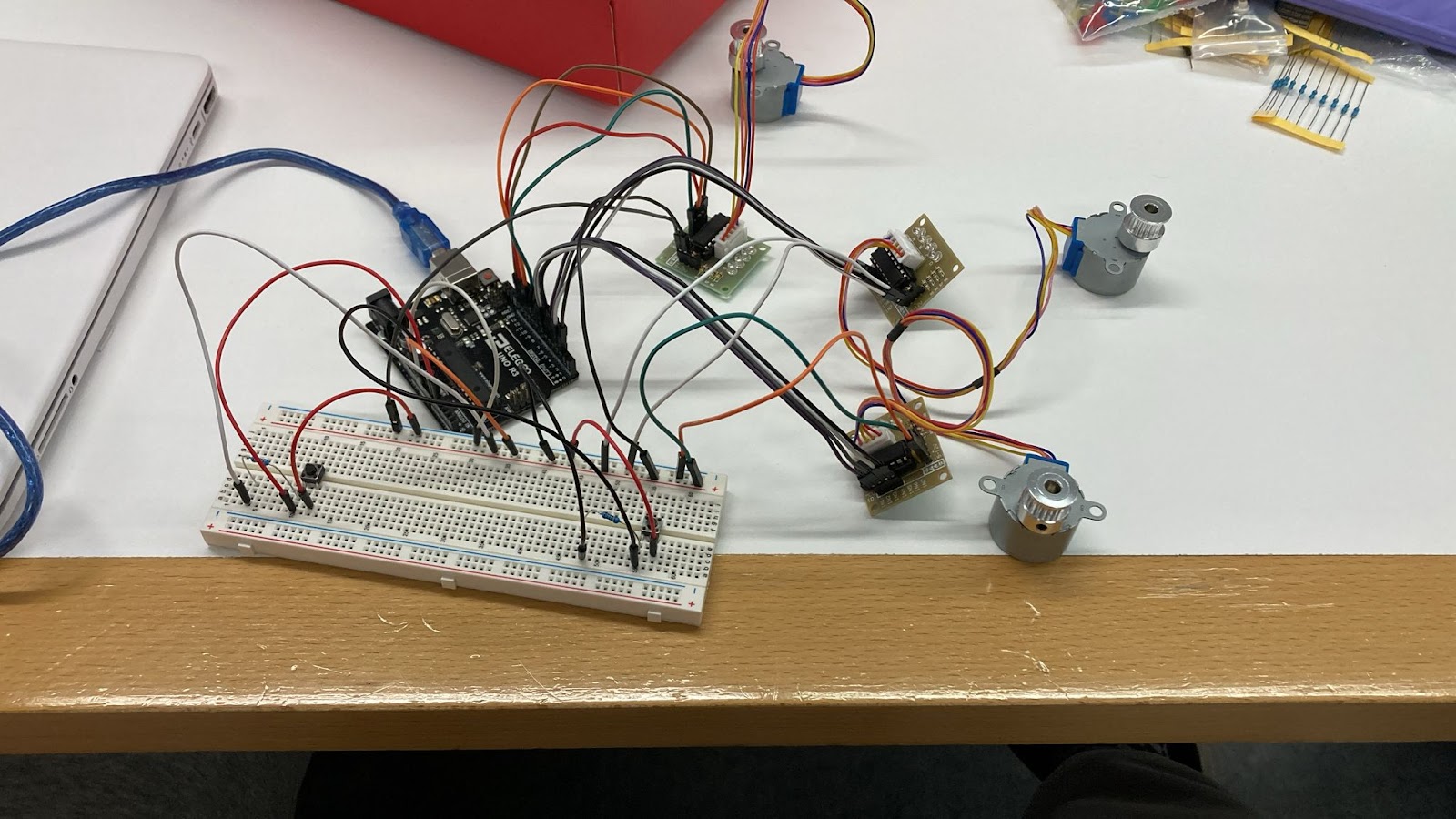
Por último montamos los tres motores con los botones de inicio y de reinicio, tras varias pruebas de ensayo-error conseguimos hacer que funcionaran correctamente, tanto hacia adelante como hacia atrás.
Una vez que tuvimos un funcionamiento correcto de todas las funcionalidades empezamos a montar el conjunto entero y combinar las funcionalidades entre sí y con el material externo que necesitamos.
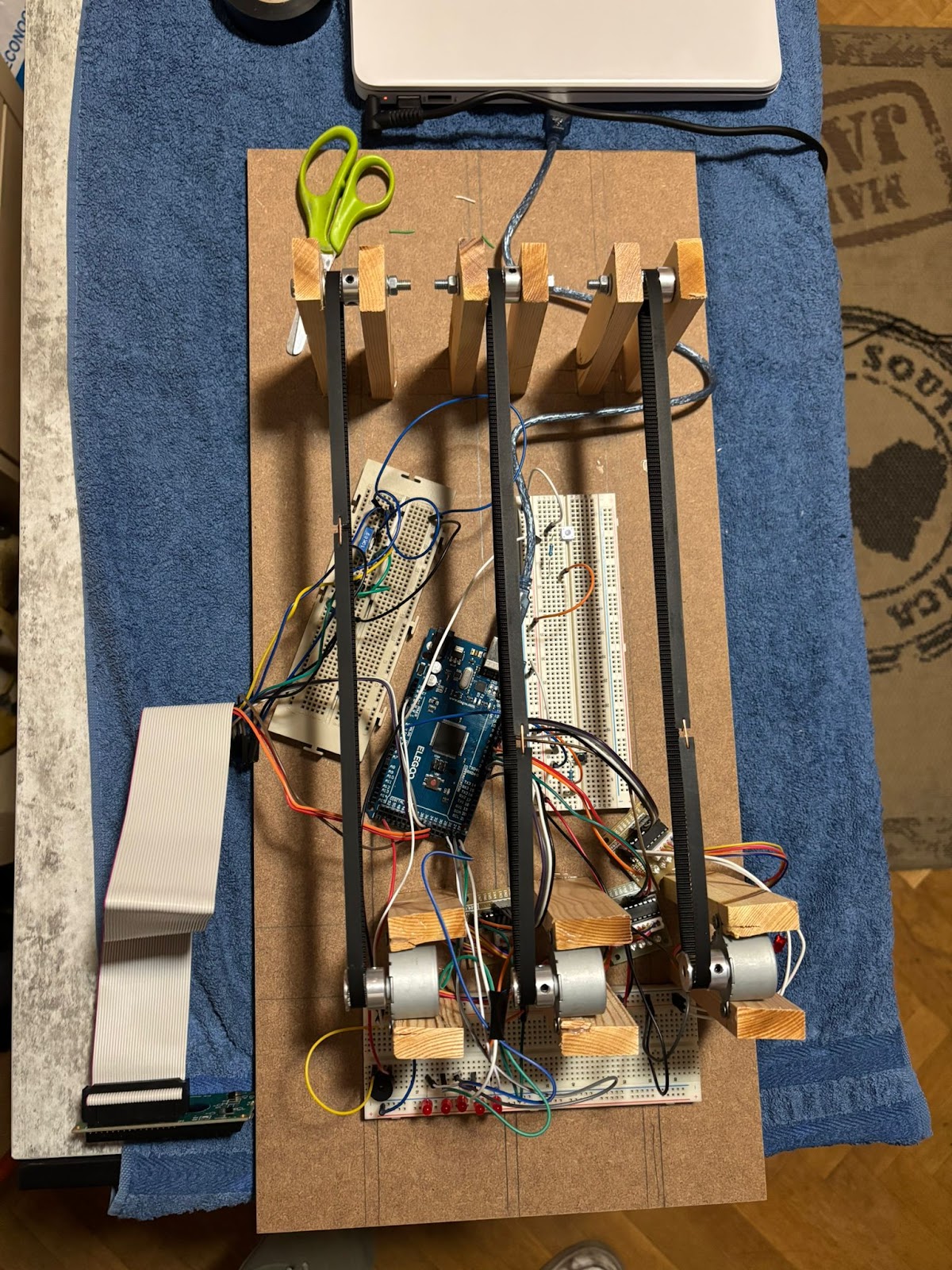
Juntando tenemos un primer prototipo final
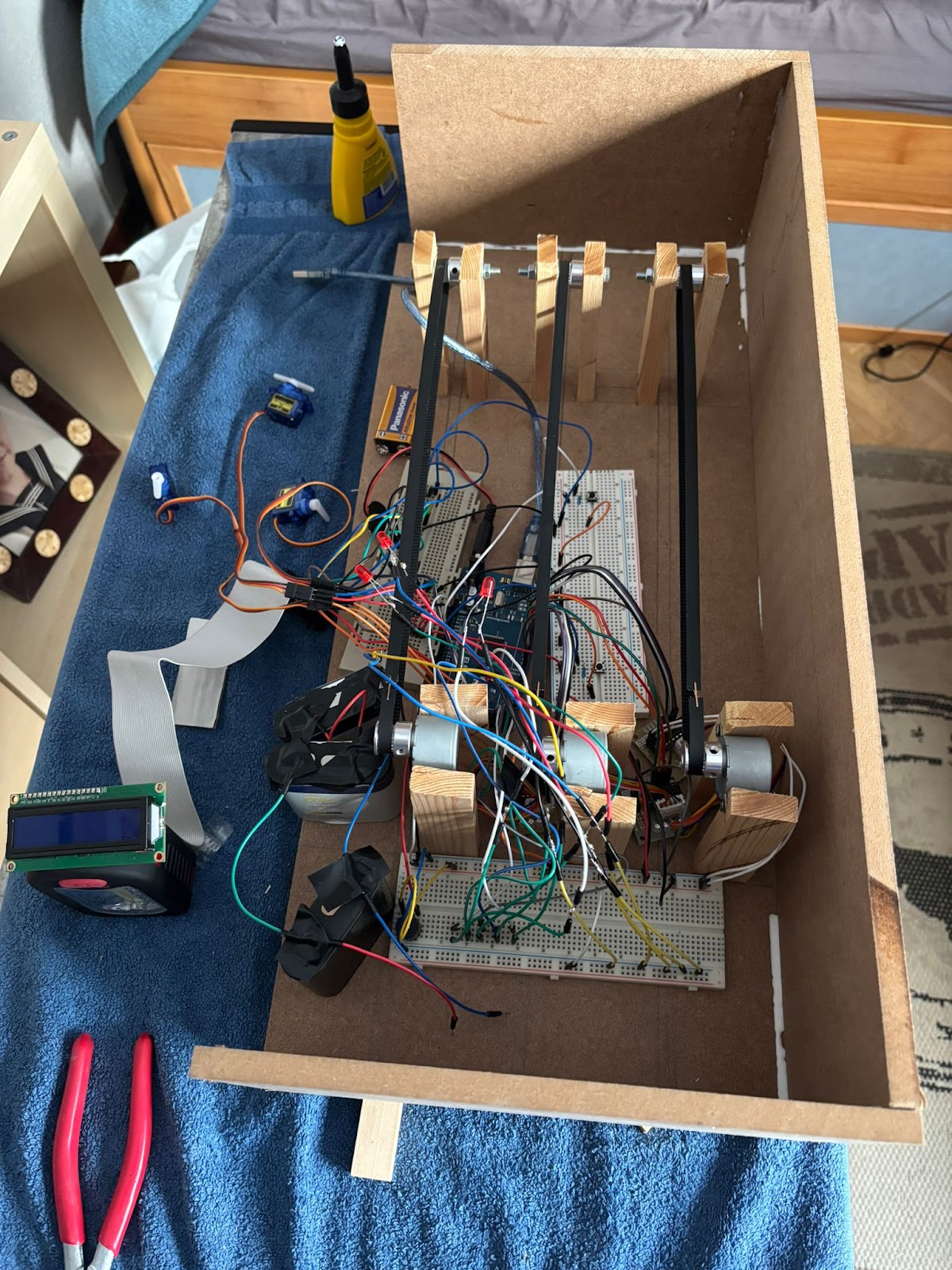
Como resultado de todo el montaje obtenemos la maqueta final del proyecto:

Código
#include <Stepper.h>
#include <LiquidCrystal.h>
#include <Servo.h>
// NOTAS HIMNO ESPAÑA
#define DO 523.25
#define RE 587.33
#define MI 659.26
#define FA 698.46
#define SOL 783.99
#define LA 880
#define SI 987.77
#define RE2 1174.66
#define DO2 1062
#define DoS 554.37
#define RES 622.25
#define FAS 739.99
#define SOLS 830.61
#define FAS2 1479.98
#define a 1000
#define b 500
// NOTAS HIMNO EEUU
int NOTE_B0 = 31;
int NOTE_C1 = 33;
int NOTE_CS1 = 35;
int NOTE_D1 = 37;
int NOTE_DS1 = 39;
int NOTE_E1 = 41;
int NOTE_F1 = 44;
int NOTE_FS1 = 46;
int NOTE_G1 = 49;
int NOTE_GS1 = 52;
int NOTE_A1 = 55;
int NOTE_AS1 = 58;
int NOTE_B1 = 62;
int NOTE_C2 = 65;
int NOTE_CS2 = 69;
int NOTE_D2 = 73;
int NOTE_E2 = 82;
int NOTE_F2 = 87;
int NOTE_FS2 = 93;
int NOTE_G2 = 98;
int NOTE_GS2 = 104;
int NOTE_A2 = 110;
int NOTE_AS2 = 117;
int NOTE_B2 = 123;
int NOTE_C3 = 131;
int NOTE_CS3 = 139;
int NOTE_D3 = 147;
int NOTE_DS3 = 156;
int NOTE_E3 = 165;
int NOTE_F3 = 175;
int NOTE_FS3 = 185;
int NOTE_G3 = 196;
int NOTE_GS3 = 208;
int NOTE_A3 = 220;
int NOTE_AS3 = 233;
int NOTE_B3 = 247;
int NOTE_C4 = 262;
int NOTE_CS4 = 277;
int NOTE_D4 = 294;
int NOTE_DS4 = 311;
int NOTE_E4 = 330;
int NOTE_F4 = 349;
int NOTE_FS4 = 370;
int NOTE_G4 = 392;
int NOTE_GS4 = 415;
int NOTE_A4 = 440;
int NOTE_AS4 = 466;
int NOTE_B4 = 494;
int NOTE_C5 = 523;
int NOTE_CS5 = 554;
int NOTE_D5 = 587;
int NOTE_DS5 = 622;
int NOTE_E5 = 659;
int NOTE_F5 = 698;
int NOTE_FS5 = 740;
int NOTE_G5 = 784;
int NOTE_GS5 = 831;
int NOTE_A5 = 880;
int NOTE_AS5 = 932;
int NOTE_B5 = 988;
int NOTE_C6 = 1047;
int NOTE_CS6 = 1109;
int NOTE_D6 = 1175;
int NOTE_DS6 = 1245;
int NOTE_E6 = 1319;
int NOTE_F6 = 1397;
int NOTE_FS6 = 1480;
int NOTE_G6 = 1568;
int NOTE_GS6 = 1661;
int NOTE_A6 = 1760;
int NOTE_AS6 = 1865;
int NOTE_B6 = 1976;
int NOTE_C7 = 2093;
int NOTE_CS7 = 2217;
int NOTE_D7 = 2349;
int NOTE_DS7 = 2489;
int NOTE_E7 = 2637;
int NOTE_F7 = 2794;
int NOTE_FS7 = 2960;
int NOTE_G7 = 3136;
int NOTE_GS7 = 3322;
int NOTE_A7 = 3520;
int NOTE_AS7 = 3729;
int NOTE_B7 = 3951;
int NOTE_C8 = 4186;
int NOTE_CS8 = 4435;
int NOTE_D8 = 4699;
int NOTE_DS8 = 4978;
int tempo = 500;
// NOTAS HIMNO INGLATERRA
const int a4 = 440;
const int b4 = 493.88;
const int cs5 = 570;
const int d5 = 587.33;
const int e5 = 659.25;
const int fs5 = 740;
const int g5 = 784;
const int gs5 = 830.61;
const int a5 = 885;
const int as5 = 920;
const int b5 = 987.77;
const int c6 = 1046.5;
const int cs6 = 1107.73;
const int d6 = 1174.66;
const int e6 = 1318.51;
const int f6 = 1396.91;
const int fs6 = 1479.98;
const int gs6 = 1661.22;
const int as6 = 1864.66;
const int notebreak = 50;
// DECLARACIÓN DE PINES Y VARIABLES
int buzzer = 53;
int BOTON_INICIO = A0;
int botonInicioNuevo;
int botonInicioAntiguo = 1;
int BOTON_RESET = A1;
int botonResetNuevo;
int botonResetAntiguo = 1;
int contadorBoton = 0;
int LED1 = 22;
int LED2 = 23;
int LED3 = 24;
int LED4 = 25;
int LED5 = 26;
int empezar = 0;
int pasosPorRevolucion1 = 2048;
int velocidadMotor1 = 15;
int pasosPorRevolucion2 = 2048;
int velocidadMotor2 = 15;
int pasosPorRevolucion3 = 2048;
int velocidadMotor3 = 15;
long numeroAleatorio;
int contadorCaballo1 = 0;
int contadorCaballo2 = 0;
int contadorCaballo3 = 0;
int tiempoDelay = 5000;
Stepper motor1(pasosPorRevolucion1, 10, 12, 11, 13);
Stepper motor2(pasosPorRevolucion2, 6, 8, 7, 9);
Stepper motor3(pasosPorRevolucion3, 2, 4, 3, 5);
int motor1_IN1 = 13;
int motor1_IN2 = 12;
int motor1_IN3 = 11;
int motor1_IN4 = 10;
int motor2_IN1 = 9;
int motor2_IN2 = 8;
int motor2_IN3 = 7;
int motor2_IN4 = 6;
int motor3_IN1 = 5;
int motor3_IN2 = 4;
int motor3_IN3 = 3;
int motor3_IN4 = 2;
LiquidCrystal lcd(35, 34, 36, 37, 38, 39);
// Variables de tiempo
unsigned long tiempoInicio = 0;
unsigned long tiempoFin = 0;
Servo servoMotor1;
Servo servoMotor2;
Servo servoMotor3;
// INICIALIZAMOS LOS COMPONENTES
void setup() {
Serial.begin(9600);
randomSeed(analogRead(0));
motor1.setSpeed(velocidadMotor1);
motor2.setSpeed(velocidadMotor2);
motor3.setSpeed(velocidadMotor3);
pinMode(BOTON_INICIO, INPUT);
pinMode(BOTON_RESET, INPUT);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED5, OUTPUT);
pinMode(buzzer, OUTPUT);
servoMotor1.attach(46);
servoMotor2.attach(47);
servoMotor3.attach(49);
servoMotor1.write(0);
servoMotor2.write(0);
servoMotor3.write(0);
}
void loop() {
// Pulsando el boton se inicializa la carrera
botonInicioNuevo = digitalRead(BOTON_INICIO);
delay(100);
// Comprobamos el valor del boton y si se ha pulsado, comienza la carrera
if ((botonInicioNuevo == 0 && botonInicioAntiguo == 1) || contadorBoton == 1) {
contadorBoton = 1;
// Comienza el semaforo
if (empezar == 0) {
digitalWrite(LED1, HIGH);
tone(buzzer, 500);
delay(500);
noTone(buzzer);
delay(500);
digitalWrite(LED2, HIGH);
tone(buzzer, 500);
delay(500);
noTone(buzzer);
delay(500);
digitalWrite(LED3, HIGH);
tone(buzzer, 500);
delay(500);
noTone(buzzer);
delay(500);
digitalWrite(LED4, HIGH);
tone(buzzer, 500);
delay(500);
noTone(buzzer);
delay(500);
digitalWrite(LED5, HIGH);
tone(buzzer, 600);
delay(500);
noTone(buzzer);
delay(500);
digitalWrite(LED1, LOW);
digitalWrite(LED2, LOW);
digitalWrite(LED3, LOW);
digitalWrite(LED4, LOW);
digitalWrite(LED5, LOW);
empezar++;
// Almacena la hora en la que ha empezado la carrera
tiempoInicio = millis();
}
// Genera y almacena el numero aleatorio
numeroAleatorio = random(1, 4);
Serial.println("Numero Aleatorio: " + String(numeroAleatorio));
// Comprueba si se ha llegado a la meta con un contador de movimientos
if (contadorCaballo1 < 5 || contadorCaballo2 < 5 || contadorCaballo3 < 5) {
// Si sale el UNO de forma aleatoria, se activa el motor 1 y avanza la cinta con el caballo
if (numeroAleatorio == 1) {
Serial.println("Numero Aleatorio que es UNO: " + String(numeroAleatorio));
Serial.println("¡Se mueve caballo UNO!");
encender(motor1_IN1, motor1_IN2, motor1_IN3, motor1_IN4);
motor1.step(pasosPorRevolucion1);
apagar(motor1_IN1, motor1_IN2, motor1_IN3, motor1_IN4);
contadorCaballo1++;
Serial.println("Contador: " + String(contadorCaballo1));
delay(tiempoDelay);
} else if (numeroAleatorio == 2) { // Si sale el DOS de forma aleatoria, se activa el motor 2 y avanza la cinta con el caballo
Serial.println("Numero Aleatorio que es DOS:" + String(numeroAleatorio));
Serial.println("¡Se mueve caballo DOS!");
encender(motor2_IN1, motor2_IN2, motor2_IN3, motor2_IN4);
motor2.step(pasosPorRevolucion2);
apagar(motor2_IN1, motor2_IN2, motor2_IN3, motor2_IN4);
contadorCaballo2++;
Serial.println("Contador: " + String(contadorCaballo2));
delay(tiempoDelay);
} else { // Si sale el TRES de forma aleatoria, se activa el motor 3 y avanza la cinta con el caballo
Serial.println("Numero Aleatorio que es TRES:" + String(numeroAleatorio));
Serial.println("¡Se mueve caballo TRES!");
encender(motor3_IN1, motor3_IN2, motor3_IN3, motor3_IN4);
motor3.step(pasosPorRevolucion3);
apagar(motor3_IN1, motor3_IN2, motor3_IN3, motor3_IN4);
contadorCaballo3++;
Serial.println("Contador: " + String(contadorCaballo3));
delay(tiempoDelay);
}
}
// Comprueba si ha ganado y comienza el protocolo de victoria, con el display, la bandera y el himno
if (contadorCaballo1 == 5) {
// Almacena la hora en la que ha finalizado la carrera
tiempoFin = millis();
// Resta los valores de inicio y fin para calcular el tiempo que ha transcurrido en la carrera
unsigned long tiempoTotal = tiempoFin - tiempoInicio;
// Calculamos los segundos y minutos
unsigned long segundos = tiempoTotal / 1000;
unsigned long minutos = segundos / 60;
segundos = segundos % 60;
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print("GANADOR DE");
lcd.setCursor(0, 1);
lcd.print("LA CARRERA");
delay(5000);
String nombre = "V. Cortinas";
String nacionalidad = "ESP";
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(nombre);
lcd.setCursor(13, 0);
lcd.print(nacionalidad);
lcd.setCursor(0, 1);
lcd.print("TIEMPO:");
lcd.setCursor(9, 1);
if (minutos < 10) {
lcd.print("0");
}
lcd.print(minutos);
lcd.print(":");
if (segundos < 10) {
lcd.print("0");
}
lcd.print(segundos);
Serial.println("¡Ha GANADO el caballo UNO!");
for (int i = 0; i <= 90; i++) {
servoMotor1.write(i);
delay(100);
}
himnoEspana();
contadorBoton--;
empezar = 0;
}
// Comprueba si ha ganado y comienza el protocolo de victoria, con el display, la bandera y el himno
if (contadorCaballo2 == 5) {
// Almacena la hora en la que ha finalizado la carrera
tiempoFin = millis();
// Resta los valores de inicio y fin para calcular el tiempo que ha transcurrido en la carrera
unsigned long tiempoTotal = tiempoFin - tiempoInicio;
// Calculamos los segundos y minutos
unsigned long segundos = tiempoTotal / 1000;
unsigned long minutos = segundos / 60;
segundos = segundos % 60;
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print("GANADOR DE");
lcd.setCursor(0, 1);
lcd.print("LA CARRERA");
delay(5000);
String nombre = "M. Cerejido";
String nacionalidad = "USA";
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(nombre);
lcd.setCursor(13, 0);
lcd.print(nacionalidad);
lcd.setCursor(0, 1);
lcd.print("TIEMPO:");
lcd.setCursor(9, 1);
if (minutos < 10) {
lcd.print("0");
}
lcd.print(minutos);
lcd.print(":");
if (segundos < 10) {
lcd.print("0");
}
lcd.print(segundos);
Serial.println("¡Ha GANADO el caballo DOS!");
for (int i = 0; i <= 90; i++) {
servoMotor2.write(i);
delay(100);
}
himnoEEUU();
contadorBoton--;
empezar = 0;
}
// Comprueba si ha ganado y comienza el protocolo de victoria, con el display, la bandera y el himno
if (contadorCaballo3 == 5) {
// Almacena la hora en la que ha finalizado la carrera
tiempoFin = millis();
// Resta los valores de inicio y fin para calcular el tiempo que ha transcurrido en la carrera
unsigned long tiempoTotal = tiempoFin - tiempoInicio;
// Calculamos los segundos y minutos
unsigned long segundos = tiempoTotal / 1000;
unsigned long minutos = segundos / 60;
segundos = segundos % 60;
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print("GANADOR DE");
lcd.setCursor(0, 1);
lcd.print("LA CARRERA");
delay(5000);
String nombre = "J. Haering";
String nacionalidad = "ENG";
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(nombre);
lcd.setCursor(13, 0);
lcd.print(nacionalidad);
lcd.setCursor(0, 1);
lcd.print("TIEMPO:");
lcd.setCursor(9, 1);
if (minutos < 10) {
lcd.print("0");
}
lcd.print(minutos);
lcd.print(":");
if (segundos < 10) {
lcd.print("0");
}
lcd.print(segundos);
Serial.println("¡Ha GANADO el caballo TRES!");
for (int i = 0; i <= 90; i++) {
servoMotor3.write(i);
delay(100);
}
himnoInglaterra();
contadorBoton--;
empezar = 0;
}
}
botonInicioAntiguo = botonInicioNuevo;
// Pulsando el boton se reinician todos los valores y los caballos vuelven a la posicion de salida
botonResetNuevo = digitalRead(BOTON_RESET);
delay(100);
if (botonResetNuevo == 0 && botonResetAntiguo == 1) {
// Se resetea el motor UNO
for (int i = 1; i <= contadorCaballo1; i++) {
encender(motor1_IN1, motor1_IN2, motor1_IN3, motor1_IN4);
motor1.step(-pasosPorRevolucion1);
apagar(motor1_IN1, motor1_IN2, motor1_IN3, motor1_IN4);
}
// Se resetea el motor DOS
for (int i = 1; i <= contadorCaballo2; i++) {
encender(motor2_IN1, motor2_IN2, motor2_IN3, motor2_IN4);
motor2.step(-pasosPorRevolucion2);
apagar(motor2_IN1, motor2_IN2, motor2_IN3, motor2_IN4);
}
// Se resetea el motor TRES
for (int i = 1; i <= contadorCaballo3; i++) {
encender(motor3_IN1, motor3_IN2, motor3_IN3, motor3_IN4);
motor3.step(-pasosPorRevolucion3);
apagar(motor3_IN1, motor3_IN2, motor3_IN3, motor3_IN4);
}
// Se resetean los datos del display
lcd.clear();
// Se resetea el servo UNO
if (contadorCaballo1 == 5 ) {
for (int i = 90; i >= 0; i--) {
servoMotor1.write(i);
delay(100);
}
}
// Se resetea el servo DOS
if (contadorCaballo2 == 5 ) {
for (int i = 90; i >= 0; i--) {
servoMotor2.write(i);
delay(100);
}
}
// Se resetea el servo TRES
if (contadorCaballo3 == 5 ) {
for (int i = 90; i >= 0; i--) {
servoMotor3.write(i);
delay(100);
}
}
tiempoInicio = 0;
tiempoFin = 0;
contadorCaballo1 = 0;
contadorCaballo2 = 0;
contadorCaballo3 = 0;
}
botonResetAntiguo = botonResetNuevo;
}
// Funcion para ENCENDER el motor stepper cada vez que se utiliza
void encender (int in1, int in2, int in3, int in4) {
digitalWrite (in1, HIGH);
digitalWrite (in2, HIGH);
digitalWrite (in3, HIGH);
digitalWrite (in4, HIGH);
}
// Funcion para APAGAR el motor stepper cada vez que se deja de utilizar
void apagar (int in1, int in2, int in3, int in4) {
digitalWrite (in1, LOW);
digitalWrite (in2, LOW);
digitalWrite (in3, LOW);
digitalWrite (in4, LOW);
}
// Funcion para generar las notas del HIMNO DE ESPAÑA
void himnoEspana() {
Serial.println("¡Ha GANADO el caballo UNO!");
tone(buzzer, SOL , a);
delay(500);
noTone(buzzer);
tone(buzzer, RE , a);
delay(500);
noTone(buzzer);
tone(buzzer, SI , a);
delay(500);
noTone(buzzer);
tone(buzzer, SOL , b);
delay(500);
noTone(buzzer);
tone(buzzer, RE2 , b);
delay(400);
noTone(buzzer);
tone(buzzer, DO2 , b);
delay(400);
noTone(buzzer);
tone(buzzer, SI , b);
delay(400);
noTone(buzzer);
tone(buzzer, LA , b);
delay(400);
noTone(buzzer);
tone(buzzer, SOL , b);
delay(400);
noTone(buzzer);
tone(buzzer, SOL , b);
delay(400);
noTone(buzzer);
tone(buzzer, FAS , b);
delay(400);
noTone(buzzer);
tone(buzzer, MI , b);
delay(400);
noTone(buzzer);
tone(buzzer, RE , b);
delay(400);
noTone(buzzer);
tone(buzzer, SOL , a);
delay(500);
noTone(buzzer);
tone(buzzer, LA , a);
delay(500);
noTone(buzzer);
tone(buzzer, SI , 1500);
delay(1000);
noTone(buzzer);
tone(buzzer, RE2 , b);
delay(400);
tone(buzzer, DO2 , b);
delay(400);
tone(buzzer, SI , b);
delay(400);
tone(buzzer, LA , b);
delay(400);
tone(buzzer, SOL , b);
delay(400);
tone(buzzer, RE2 , 2000);
delay(1000);
//--------------------- SEGUNDA PARTE
tone(buzzer, RE2 , a);
delay(500);
tone(buzzer, SI , 250);
delay(500);
tone(buzzer, RE2 , 250);
delay(400);
tone(buzzer, DO2 , a);
delay(400);
tone(buzzer, LA , 250);
delay(500);
tone(buzzer, DO2 , 250);
delay(400);
tone(buzzer, SI , a);
delay(500);
tone(buzzer, SOL , 250);
delay(400);
tone(buzzer, SI , 250);
delay(400);
tone(buzzer, LA , b);
delay(400);
tone(buzzer, RE , b);
delay(400);
tone(buzzer, MI , b);
delay(400);
tone(buzzer, FAS , b);
delay(400);
tone(buzzer, SOL , a);
delay(500);
tone(buzzer, LA , a);
delay(500);
tone(buzzer, SI , 250);
delay(500);
tone(buzzer, DO2 , 250);
delay(400);
tone(buzzer, RE2 , b);
delay(400);
tone(buzzer, DO2 , b);
delay(400);
tone(buzzer, SI , a);
delay(500);
tone(buzzer, LA , a);
delay(500);
tone(buzzer, SOL , 2000);
delay(1000);
}
// Funcion para generar las notas del HIMNO DE EEUU
void himnoEEUU() {
Serial.println("¡Ha GANADO el caballo DOS!");
tone(buzzer, NOTE_G5);
delay(tempo);
tone(buzzer, NOTE_E5);
delay(tempo / 3);
tone(buzzer, NOTE_C5);
delay(tempo);
tone(buzzer, NOTE_E5);
delay(tempo);
tone(buzzer, NOTE_G5);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo * 2);
tone(buzzer, NOTE_E6);
delay(tempo);
tone(buzzer, NOTE_D6);
delay(tempo / 3);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_E5);
delay(tempo);
tone(buzzer, NOTE_FS5);
delay(tempo);
tone(buzzer, NOTE_G5);
delay(tempo * 2);
tone(buzzer, NOTE_G5);
delay(tempo / 3);
tone(buzzer, NOTE_E6);
delay(tempo * 1.5);
tone(buzzer, NOTE_D6);
delay(tempo / 3);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_B5);
delay(tempo);
tone(buzzer, NOTE_A5);
delay(tempo);
tone(buzzer, NOTE_B5);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_G5);
delay(tempo);
tone(buzzer, NOTE_E5);
delay(tempo);
tone(buzzer, NOTE_C5);
delay(tempo);
tone(buzzer, NOTE_E6);
delay(tempo);
tone(buzzer, NOTE_E6);
delay(tempo / 3);
tone(buzzer, NOTE_E6);
delay(tempo);
tone(buzzer, NOTE_F6);
delay(tempo / 3);
tone(buzzer, NOTE_G6);
delay(tempo);
tone(buzzer, NOTE_G6);
delay(tempo);
tone(buzzer, NOTE_F6);
delay(tempo / 2);
tone(buzzer, NOTE_E6);
delay(tempo / 2);
tone(buzzer, NOTE_D6);
delay(tempo * 2);
tone(buzzer, NOTE_E6);
delay(tempo / 3);
tone(buzzer, NOTE_F6);
delay(tempo);
tone(buzzer, NOTE_F6);
delay(tempo);
tone(buzzer, NOTE_F6);
delay(tempo);
tone(buzzer, NOTE_E6);
delay(tempo);
tone(buzzer, NOTE_D6);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_B5);
delay(tempo);
tone(buzzer, NOTE_A5);
delay(tempo);
tone(buzzer, NOTE_B5);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_G5);
delay(tempo);
tone(buzzer, NOTE_E5);
delay(tempo);
tone(buzzer, NOTE_C5);
delay(tempo);
tone(buzzer, NOTE_G5);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo / 2);
tone(buzzer, NOTE_B5);
delay(tempo / 2);
tone(buzzer, NOTE_A5);
delay(tempo);
tone(buzzer, NOTE_A5);
delay(tempo);
tone(buzzer, NOTE_A5);
delay(tempo);
tone(buzzer,NOTE_D6);
delay(tempo);
tone(buzzer, NOTE_F6);
delay(tempo / 2);
tone(buzzer,NOTE_E6);
delay(tempo / 2);
tone(buzzer,NOTE_D6);
delay(tempo / 2);
tone(buzzer, NOTE_C6);
delay(tempo / 2);
tone(buzzer, NOTE_C6);
delay(tempo);
tone(buzzer, NOTE_B5);
delay(tempo * 4);
tone(buzzer, NOTE_G5);
delay(tempo);
tone(buzzer, NOTE_G5);
delay(tempo);
tone(buzzer, NOTE_C6);
delay(tempo * 2);
tone(buzzer, NOTE_D6);
delay(tempo / 2);
tone(buzzer, NOTE_E6);
delay(tempo / 2);
tone(buzzer, NOTE_F6);
delay(tempo / 2);
tone(buzzer, NOTE_G6);
delay(tempo * 6);
tone(buzzer, NOTE_C6);
delay(tempo * 1.5);
tone(buzzer, NOTE_D6);
delay(tempo * 1.5);
tone(buzzer, NOTE_E6);
delay(tempo * 2);
tone(buzzer, NOTE_F6);
delay(tempo);
tone(buzzer, NOTE_D6);
delay(tempo * 2.5);
tone(buzzer, NOTE_C6);
noTone(buzzer);
}
void playNote(int note, int time){
tone(buzzer, note, time);
delay(time + notebreak);
}
// Funcion para generar las notas del HIMNO DE INGLATERRA
void himnoInglaterra() {
Serial.println("¡Ha GANADO el caballo TRES!");
const int q = 300;
const int c = 600;
const int qb = q + notebreak;
const int cb = c + notebreak;
playNote(g5, c);
playNote(g5, c);
playNote(a5, c);
playNote(fs5, c + q);
playNote(g5, q);
playNote(a5, c);
playNote(b5, c);
playNote(b5, c);
playNote(c6, c);
playNote(b5, c + q);
playNote(a5, q);
playNote(g5, c);
playNote(a5, c);
playNote(g5, c);
playNote(fs5, c);
playNote(g5, c);
playNote(g5, q);
playNote(a5, q);
playNote(b5, q);
playNote(c6, q);
playNote(d6, c);
playNote(d6, c);
playNote(d6, c);
playNote(d6, c + q);
playNote(c6, q);
playNote(b5, c);
playNote(c6, c);
playNote(c6, c);
playNote(c6, c);
playNote(c6, c + q);
playNote(b5, q);
playNote(a5, c);
playNote(b5, c);
playNote(c6, q);
playNote(b5, q);
playNote(a5, q);
playNote(g5, q);
playNote(b5, c + q);
playNote(c6, q);
playNote(d6, c);
playNote(e6, q);
playNote(c6, q);
playNote(b5, c);
playNote(a5, c);
playNote(g5, (c * 3));
}Video del funcionamiento
Problemas y soluciones
- El primer problema al que nos enfrentamos fue la falta de pines, ya que necesitábamos un total de 27 pines, la solución fue la compra de multiplexores para buscar incrementar el número de salidas.
- El segundo problema fue que los multiplexores no funcionaban correctamente, por lo que tuvimos que descartar esta opción y requerimos de la compra de un Mega Arduino, el cual tiene 52 pines.
- Tras solucionar el problema de los pines tuvimos dificultades a la hora de hacer que los motores funcionasen correctamente, el problema consistía en que después de que un motor se moviera, este se quedaba consumiendo ya que se quedaba encendida una luz mientras otro se movía, por lo que los otros motores no tenían la potencia suficiente para moverse. Para resolver este inconveniente añadimos dos funciones, una de apagado y otra de encendido en el código, de manera que nos aseguramos que cuando un motor deja de moverse se apaga totalmente y no consume energía. (foto funciones)
- El cuarto problema que tuvimos es en referente a la potencia, los 5V del Arduino no son suficientes, ni siquiera son suficientes los 9V de la pila proporcionada por la universidad. Esto se resuelve conectando el proyecto a una corriente doméstica, obteniendo potencia más que suficiente para mover todo.
- El quinto problema surgió al implementar el semáforo, ya que la longitud de los cables no era suficiente tuvimos que soldar hasta 10 cables para poder sacar el semáforo fuera de la caja.
- El sexto problema fue que las correas necesarias para el movimiento de los caballos no se quedaban fijas con cinta adhesiva. Para solucionarlo las tuvimos que unir con grapas.
- Finalmente, nos encontramos con un problema del reloj, el cual tiene la función de cronometrar el tiempo que tarda la carrera, para ello inicialmente lo programamos con la función millis(). Nos dimos cuenta que en vez de medir la carrera, lo que hacía era cronometrar toda la ejecución desde empezaba el código hasta que finaliza cada carrera por lo que no era correcto ni tampoco lo que queríamos. Como solución hemos optado por guardar en una variable el tiempo o instante en el que empieza la carrera y otra variable que guarde el tiempo o instante en el que termina. Una vez terminada la carrera, en otra variable guardamos el resultado de la resta entre la variable del final menos la del inicio y obtenemos el tiempo exacto de la carrera. Por último, lo cambiamos de formato a segundos y minutos y lo mostramos por pantalla en el display.
Conclusión
Tras la finalización del proyecto podemos decir que estamos muy orgullosos del trabajo realizado, tanto durante todo el proceso como en el resultado final, hemos conseguido alcanzar todos los objetivos fijados en el inicio y plasmar en la maqueta final todos los detalles e ideas que teníamos en mente del proyecto. Hemos aprendido a diseñar un sistema empotrado pasando por fundir cables, pegar y atornillar piezas de madera, montar circuitos, usar Arduino y programar este para obtener un resultado sólido pero manejable, robusto y divertido con el que pasar un buen rato y poder ver en directo como todos los elementos físicos de la maqueta trabajan en conjunto para lograr mover tres caballos que buscan la victoria de la carrera.