Doblador de camisetas automático – La Dobletta
Curso 2024 – 2025
Alex Polo Rodríguez – Alberto Garrote Salamanca – David Huertas Salas
Introducción
En el mundo actual, la automatización se ha convertido en un elemento clave para optimizar procesos, mejorar la eficiencia y simplificar las tareas cotidianas. En este contexto, este proyecto aborda el diseño y desarrollo de un doblador de camisetas automático utilizando tecnología Arduino, con el objetivo de transformar una actividad doméstica común en un proceso rápido, eficiente y estandarizado.
La inspiración para este proyecto surge de la necesidad de agilizar el doblado de camisetas, una tarea que, aunque sencilla, consume tiempo y puede ser repetitiva. Al emplear un sistema automatizado basado en Arduino, se busca no solo reducir el esfuerzo humano, sino también proporcionar una solución accesible y funcional que pueda ser implementada en entornos domésticos y comerciales, como lavanderías o tiendas de ropa.
Este documento detalla todas las etapas del proyecto, desde la implementación y validación del prototipo, hasta los problemas que han surgido y las soluciones a éstos. Asimismo, se describen los componentes utilizados, las técnicas de programación aplicadas y las pruebas realizadas para asegurar el correcto funcionamiento del dispositivo.
El resultado esperado es un doblador de camisetas que combine simplicidad en su uso, bajo costo de producción y un diseño modular que facilite su mantenimiento y personalización. Este proyecto no solo representa un avance en la integración de la tecnología en las tareas del hogar, sino también un ejemplo del potencial de Arduino como herramienta para el desarrollo de soluciones innovadoras y prácticas en la vida cotidiana.
Pasos dados e implementación
Inicialmente, se “jugó” un poco con los servomotores para familiarizarse con ellos y se hicieron unas pruebas de sincronización con dos de los servomotores. Estas pruebas consistían en entender a la perfección a qué ángulos necesitaban los servomotores estar inicializados antes de empezar a moverse. Además, el principal código se empezó a realizar aquí antes de acoplar ningúna pieza a los servomotores.
El principal problema que ha persistido durante todo el proyecto ha sido la fuerza que tenían los servomotores para mover los diferentes módulos. Después de sincronizarlos y entender bien su funcionamiento, hicimos pruebas iniciales moviendo unos folios pegados para comprobar cuánta fuerza tenían. Estas pruebas fueron un éxito rotundo y pudimos comprobar que también se podía mover con una camiseta encima.
Posteriormente, se compró un doblador prefabricado de plástico el cual se tenía pensado que fuese la principal estructura de los diferentes módulos que formarían el doblador de camisetas. Sin embargo, después de varios días de pruebas y de intentar eliminar peso de las diferentes partes de plástico, los servomotores no tenían la suficiente fuerza para mover ese tipo de material.
Se miraron alternativas y teniendo las medidas del doblador prefabricado, se recortaron 3 placas de cartón del mismo tamaño. Con estas piezas mucho más ligeras que las anteriores, se realizaron de nuevo pruebas con los diferentes módulos. Esta vez sí que tenían la fuerza suficiente los servomotores para realizar el movimiento requerido.
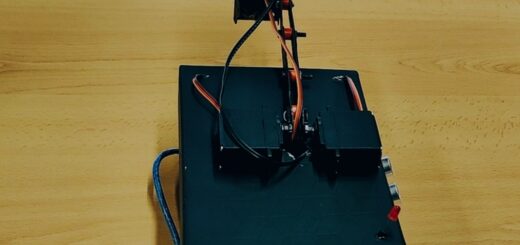
Una vez comprobado el correcto funcionamiento de las diferentes partes, se empezó a montar lo que sería la estructura principal del doblador donde irían acoplados los motores. Utilizamos 3 tablas de madera conectadas en un rectángulo e hicimos unas muescas donde acoplamos los servomotores. A esta estructura le atornillamos una patas para poder esconder el cableado por debajo de la estructura. En el hueco central, atornillamos una base de contrachapado por debajo del nivel de los servomotores que contendría la placa Arduino, la PCB y todas las conexiones.
Después de tener toda la estructura preparada y el mecanismo en funcionamiento, se ajustaron las conexiones utilizando cinta aislante, se formalizó el código y se introdujeron los motores en sus respectivas muescas. Se realizaron diferentes pruebas antes de pegar y ajustar los motores en sus posiciones finales.
Por último, se verificó el funcionamiento una vez más y se comprobó la integridad de la estructura, siendo todo un éxito.
Reparto de tareas
Todos probamos diferentes ideas para ver cómo podíamos afrontar este proyecto, es decir, este proyecto es una mezcla de las ideas de los 3 componentes del grupo.
- Alberto: Fue la persona que más se encargó del código, ya que estaba más familiarizado con él , ayudando en el hardware sobre todo en la etapa de sincronizar los servomotores.
- David: Ayudó en el montaje de la estructura y el cableado además de revisar el código
- Alex: Coordinó el hardware y el montaje de la estructura así como el cableado y parte del código
Las diferentes tareas, la realización de pruebas y el desarrollo final del proyecto se realizaron de forma equitativa entre todos los integrantes.
Costes de materiales
Los materiales que se han empleado en el proyecto son los siguientes:
| MATERIAL | PRECIO | USO |
| 6X Servomotores | 3 PRESTADOS3 COMPRADOS = 11€ | Fuerza de doblado. |
| Doblador Plástico | 10€ | Desechado y reemplazado. |
| Maderas | Reutilizado. | Estructura. |
| Cables | Prestados. | Conexiones servomotores. |
| PCB | Prestados. | Control. |
| Arduino | Prestados. | Principal estructura. |
Como podemos observar, el precio final del proyecto es muy asequible. Esto lo convierte en una opción óptima para realizar la función para la cual se ha creado.
| Precio final | 11€ |
Problemas y soluciones encontradas
El primer problema que encontramos fue que los servomotores que usamos no tenían la suficiente fuerza como para mover mucho peso, lo que limitó en gran parte el proyecto.
Indirectamente, esto hizo que tuviéramos que cambiar los materiales del doblador, porque no conseguimos que se movieran correctamente. El hecho de hacer los módulos del doblador de cartón fue la mejor solución a priori que encontramos.
Después, la mayoría de los cables que nos proporcionaron en nuestro kit no se conectaban a la protoboard por completo, por lo que daba muchos fallos de alimentación a los servomotores, que funcionaban de manera intermitente. Para solucionar este problema simplemente utilizamos los cables de un kit propio que teníamos en casa, además de otra placa protoboard.
Otro de los problemas más significativos fue el código y los fallos de Arduino, ya que, al estar hecho de una manera secuencial, había momentos en los que algunos de los servomotores, sobre todo los de la última sección del doblador, no se sincronizaban correctamente. Esto, sumado a que las conexiones de los cables no eran las más eficientes, dió muchos dolores de cabeza. La solución a esto fue optimizar el código lo máximo posible, quitando algunos delays, que se alguna forma hacían que dejará de funcionar correctamente y acortando el código, porque nos dimos cuenta que, cuantas más líneas hubiera, más limitado llegaba al final de la ejecución, perdiendo potencia y sincronización.
Por último, una vez estaba montado, los servomotores y los módulos rozaban con la estructura de madera y algunos de los cables. Llegados a este punto no supuso ninguna complejidad, ya que simplemente hicimos algunos cortes en la parte móvil del doblador para que ya no existiera este rozamiento.
Código
Se va a explicar el código desarrollado para el correcto funcionamiento del doblador de camisetas.
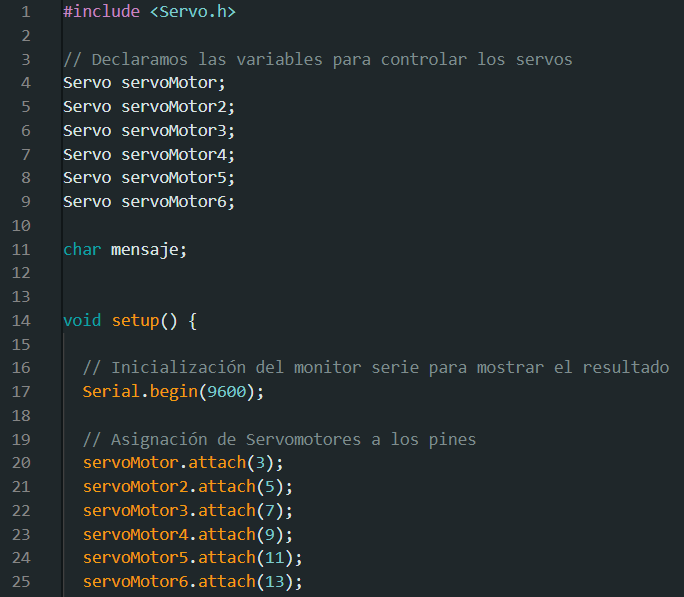
Código de declaración de las variables relacionadas con los servomotores, la variable que contendrá el mensaje escrito en el monitor serie y void setup, donde se ha inicializado el monitor serie y se han asignado los diferentes servomotores a un pin digital.
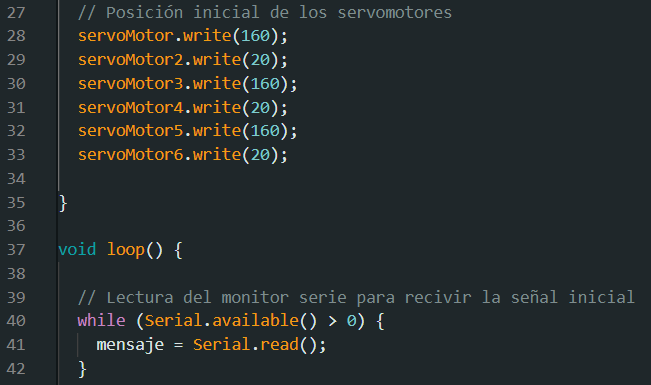
Código donde se define la posición inicial de los módulos. Como podemos ver, cada par de servomotores se inicializan en una posición contraria respecto a los 180 grados. Por ejemplo, el servomotor 1 empieza a 160 grados mientras que el servomotor 2 debe inicializarse a 20 grados. También se inicializa el bucle while dentro de la función void loop que se encargará de leer los caracteres escritos en el monitor serie y guardar dicho mensaje en la variable correspondiente.
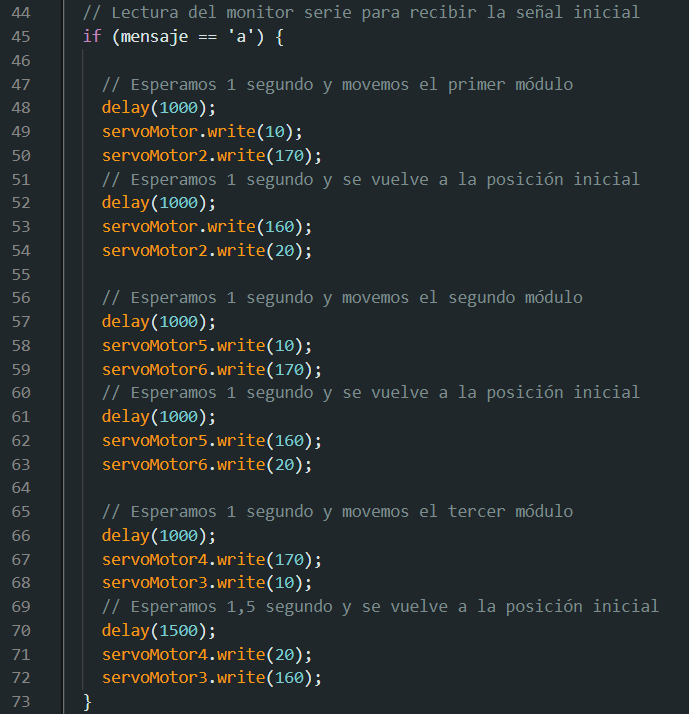
Código con la principal implementación de la secuencia de movimientos de los servomotores. Cuando se detecta que el mensaje escrito en el monitor serie es una “a” minúscula, se inicia la secuencia de movimientos. Tal y como se ha comentado en el código, los servomotores que pertenecen a cada módulo se mueven 150 grados, esperan un segundo y vuelven a la posición inicial para dar paso al siguiente módulo que repetirá el mismo movimiento.
Casos de uso
En este apartado se tratará el esquema principal de funcionamiento del proyecto.

- El primer paso trata de enviar una señal para comenzar el movimiento de los servomotores. En nuestro caso utilizamos el monitor serie. La secuencia empezará cuando se envíe por el monitor serie el carácter “a”.
- Al recibir la señal, se empieza con el movimiento de los servomotores del módulo izquierdo. Están colocados en modo espejo. Como hemos visto en la parte del código, en cada par de servomotores uno de ellos empezará a 160 grados y el otro a 20 grados. Cada uno de ellos se moverá unos 150 grados y luego volverán a su posición inicial pasado un segundo.
- Cuando termina el primer módulo, se activa el derecho y se repite el movimiento en el otro lado.
- Por último, se mueve el último módulo y la camiseta queda doblada.
Mejoras para el futuro
Aunque el producto cumple con su principal función, existen algunas mejoras para el futuro:
La principal mejora que puede tener este proyecto es el presupuesto. Si se hubiese tenido un presupuesto mayor, al utilizar unos mejores motores se podría haber utilizado la estructura principal de plástico que se tuvo que desechar.
Un cambio que podría hacerse, aunque no se trate de una mejora, es desacoplar el arduino para que no esté conectado a un PC y obtenga la alimentación de una pila. Con esta implementación se podría utilizar un botón en vez del monitor serie, como es nuestro caso.
La última mejora posible sería la decoración del producto. Una estructura más vistosa o pintar la estructura general podría mejorar la imagen del producto.