Arduino de Limpieza con Movimiento Autónomo A.L.M.A.
a.l.m.a. |
Grupo 3
Diego Forte Jara
Víctor Manuel Martínez Severiano
Asier Ruano Peñas
Índice
Introducción
Nuestro proyecto de la asignatura de
Sistemas Empotrados y de Tiempo Real es un Arduino de Limpieza con Movimiento Autónomo
o “ALMA”.
Sistemas Empotrados y de Tiempo Real es un Arduino de Limpieza con Movimiento Autónomo
o “ALMA”.
Se trata de un aspirador automático
que mediante un recorrido programado limpia la habitación y al acabar vuelve al
punto de inicio.
que mediante un recorrido programado limpia la habitación y al acabar vuelve al
punto de inicio.
Materiales necesarios
Para la construcción de este
dispositivo se han utilizado los siguientes materiales:
dispositivo se han utilizado los siguientes materiales:
MATERIALES |
PRECIO |
Arduino Uno |
0 € (Prestado) |
Motor Driver L298 |
10,40 € |
Dos motores y dos ruedas |
10 € |
Cables |
0 € (Prestado) |
Turbina 5V |
2.50 € |
Dos Mopas |
1.50 € |
Cinta Adhesiva |
0 € (Propio) |
Cartón |
0 € (Propio) |
Clips |
0 € (Propio) |
Pelota de plástico |
0.50 € |
TOTAL |
24.90 € |
El coste total del proyecto asciende a 24.90 €. No es un
prototipo excesivamente caro y puede utilizarse como inicio en el mundo de los
sistemas empotrados.
Los materiales además son fáciles de encontrar por lo que
los retrasos en el inicio del proyecto por esperas de material son casi
inexistentes.
prototipo excesivamente caro y puede utilizarse como inicio en el mundo de los
sistemas empotrados.
los retrasos en el inicio del proyecto por esperas de material son casi
inexistentes.
Construcción
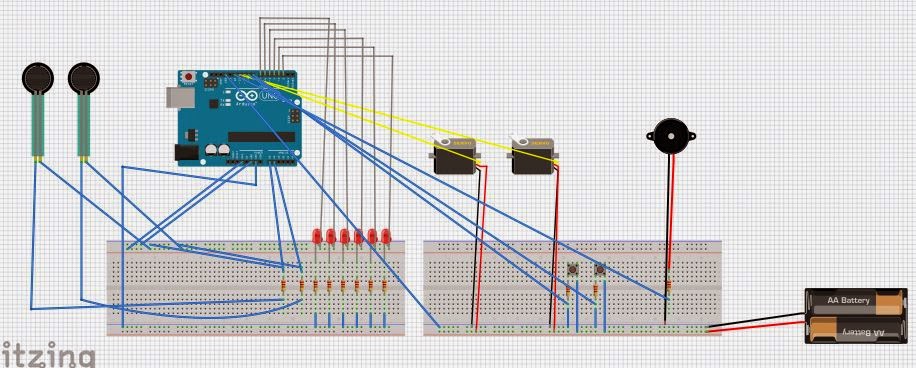
En primer lugar,
dada la dificultad de controlar las señales y evitar cortocircuitos en acciones
concretas como detectar impactos, se realizó el diseño del circuito eléctrico,
que es el siguiente:
dada la dificultad de controlar las señales y evitar cortocircuitos en acciones
concretas como detectar impactos, se realizó el diseño del circuito eléctrico,
que es el siguiente:

Una vez
realizado este circuito, se seleccionaron los materiales para preparar la
carcasa, teniendo en cuenta las dimensiones y peso de los componentes que
tenemos. Tras completar la carcasa, se implementó el circuito eléctrico.
La principal
dificultad del proyecto radica en la implementación de sensores y aparatos
externos, así como el control de movimiento del aparato.
dificultad del proyecto radica en la implementación de sensores y aparatos
externos, así como el control de movimiento del aparato.
El diseño del
código Arduino no representa una gran dificultad, centrándose en el control de
las señales de activación.
código Arduino no representa una gran dificultad, centrándose en el control de
las señales de activación.
Código de Arduino
El código ha sido programado en el entorno de programación
de Arduino. Consta de los recorridos preestablecidos de limpieza con sus
métodos de control de señales y el controlador de los parachoques que permite
al robot saber si ha impactado contra alguna pared.

de Arduino. Consta de los recorridos preestablecidos de limpieza con sus
métodos de control de señales y el controlador de los parachoques que permite
al robot saber si ha impactado contra alguna pared.
A continuación, se muestran algunos de los métodos que
permiten controlar el desplazamiento del aparato.
permiten controlar el desplazamiento del aparato.
El siguiente código pertenece al control de impactos
mediante parachoques de ALMA
mediante parachoques de ALMA

Funcionamiento
ALMA sigue un
patrón preestablecido cargado en Arduino. Si durante la ejecución del patrón es
interrumpido por un obstáculo, como una pared, realiza una función de retroceso
y sigue con la siguiente instrucción del patrón hasta que finaliza. Cuando ha
ejecutado el recorrido de limpieza, el aparato vuelve a la posición inicial
mediante la ejecución del método VolveraCasa y se detiene.
patrón preestablecido cargado en Arduino. Si durante la ejecución del patrón es
interrumpido por un obstáculo, como una pared, realiza una función de retroceso
y sigue con la siguiente instrucción del patrón hasta que finaliza. Cuando ha
ejecutado el recorrido de limpieza, el aparato vuelve a la posición inicial
mediante la ejecución del método VolveraCasa y se detiene.
Mejoras
futuras y problemas encontrados
Como principal
mejora, se implementará una conexión por mando a distancia que permite elegir
el patrón de limpieza utilizado por el robot. Ya se han implementado los tres
patrones que estarán disponibles que son los siguientes: Recorrido a
izquierdas, recorrido a derechas y recorrido libre con control mediante
impactos para controlar su movimiento.
Además, se va a completar el sistema de parachoques. Este sistema incorpora un
interruptor que detecta si el aparato ha alcanzado una pared, iniciando la
siguiente instrucción en el patrón de limpieza.
mejora, se implementará una conexión por mando a distancia que permite elegir
el patrón de limpieza utilizado por el robot. Ya se han implementado los tres
patrones que estarán disponibles que son los siguientes: Recorrido a
izquierdas, recorrido a derechas y recorrido libre con control mediante
impactos para controlar su movimiento.
Además, se va a completar el sistema de parachoques. Este sistema incorpora un
interruptor que detecta si el aparato ha alcanzado una pared, iniciando la
siguiente instrucción en el patrón de limpieza.
Los problemas
que hemos encontrado a lo largo del desarrollo del proyecto son los siguientes:
que hemos encontrado a lo largo del desarrollo del proyecto son los siguientes:
-Al instalar los
parachoques, ha habido casos en los que el contacto del detector ha dado
problemas como desconexión y cortocircuito. Por seguridad y hasta que se mejore
el diseño del circuito se ha decidido desinstalar el sistema de parachoques
parachoques, ha habido casos en los que el contacto del detector ha dado
problemas como desconexión y cortocircuito. Por seguridad y hasta que se mejore
el diseño del circuito se ha decidido desinstalar el sistema de parachoques
-El control del
mando a distancia ha dado problemas, ocasiones en las que no se detectaba la
señal o no se realizaba la acción asociada al botón. Para asegurar el buen
funcionamiento del robot durante la presentación, se ha aplazado la instalación
del selector de modos.
mando a distancia ha dado problemas, ocasiones en las que no se detectaba la
señal o no se realizaba la acción asociada al botón. Para asegurar el buen
funcionamiento del robot durante la presentación, se ha aplazado la instalación
del selector de modos.
Conclusiones
Nuestro
producto es un prototipo base que puede ser actualizado y mejorado de muchas
formas, ya que está abierto a muchas posibilidades. Nuestro principal objetivo
era lograr un robot de limpieza funcional y de bajo coste. El proyecto no
requiere mucha experiencia en electrónica ni materiales caros, es un buen modo
de comenzar el desarrollo de sistemas empotrados.
producto es un prototipo base que puede ser actualizado y mejorado de muchas
formas, ya que está abierto a muchas posibilidades. Nuestro principal objetivo
era lograr un robot de limpieza funcional y de bajo coste. El proyecto no
requiere mucha experiencia en electrónica ni materiales caros, es un buen modo
de comenzar el desarrollo de sistemas empotrados.
Adjuntos
Github del proyecto https://github.com/AsierRuano/EmpotradosG3
Se pueden encontrar la memoria completa (con imagenes) y fotos de la construcción de ALMA así como el código completo de Arduino.
Video demostración en YouTube https://www.youtube.com/watch?v=NvFwdO4bfPg
Presentación Power Point del proyecto
https://www.dropbox.com/s/eojr4jdbanaxs2t/ALMA%20Grupo%203%20Empotrados.pptx?dl=0
https://www.dropbox.com/s/eojr4jdbanaxs2t/ALMA%20Grupo%203%20Empotrados.pptx?dl=0