ARDUVISIÓN
 Grupo 14: Vicálvaro
Grupo 14: Vicálvaro
Cristina García Aparicio GII
Plamena Miroslavova Minkova GII
Andrea Rodríguez Laborda GII
1-Introducción
Hace mucho tiempo que tenemos conocimiento de la realidad virtual, pero siempre nos ha parecido que está fuera de nuestro alcance. Por esta razón, ¿no sería divertido poder construir nuestras propias gafas de realidad virtual low-cost? En este proyecto vamos a mostrar una manera de conseguirlo con nuestras gafas «ARDUVISIÓN».
«ARDUVISIÓN» se basa en la conexión de dos sistemas. En primer lugar, tenemos el Arduino que leerá de la IMU y de esta manera recogerá los movimientos del cliente y tendremos un programa en Blender (aplicación para la creación de animaciones 3D de código abierto), que reproducirá dichos movimientos en un entorno creado por nosotros.
5-Desarrollo software

6-Problemas encontrados
Aquí no estaba soldada…
Una vez soldada, ya se reconocía el movimiento. Y por fin, funcionó:
«ARDUVISIÓN» se basa en la conexión de dos sistemas. En primer lugar, tenemos el Arduino que leerá de la IMU y de esta manera recogerá los movimientos del cliente y tendremos un programa en Blender (aplicación para la creación de animaciones 3D de código abierto), que reproducirá dichos movimientos en un entorno creado por nosotros.
2-Presupuesto
- Arduino Starter Kit – Prestado
- Gafas de realidad virtual – 7,05 €
- Mini protoboard – 1,00 €
- Caja Arduino – 2,24 €
- IMU BNO055 – 11,23 €
Precio total – 21,52 €.
Al realizar el proyecto en grupo, el precio individual ha sido de 7,17 sin incluir los costes de mano de obra y soldadura.
3- Material y funcionamiento
- IMU BNO055: es un componente basado en la combinación de acelerómetro, giroscopio y magnetómetro que sirve para medir las rotaciones de los ejes x,y,z. La engancharemos a las gafas para saber hacia donde está mirando el cliente. Esta IMU envía los datos de la rotación a la placa de Arduino.
- Placa Arduino: lee los datos de de la inclinación de las gafas y los junta en un solo mensaje para poder enviarlos por Serial a Blender.
- Gafas de realidad virtual: constan de un chasis y para poder utilizarlas es necesario el uso de un Smartphone que hará de pantalla.
- Ordenador con Blender y la IDE de Arduino: Blender decodifica el mensaje que ha leído de Arduino mediante un script de Phyton y la librería pySerial. Para ello, extrae los ángulos X,Y,Z y rota la cámara de la escena para que el cliente pueda ver el entorno. El ordenador envía la imagen del entorno 3D a la pantalla de las gafas.
- SpaceDesk: aplicación de Android que expande la pantalla del ordenador para poder verla en el Smartphone.
Cuando el cliente gire la cabeza, en el entorno se verán los mismos movimientos, y esto provocará la sensación de Realidad Virtual.


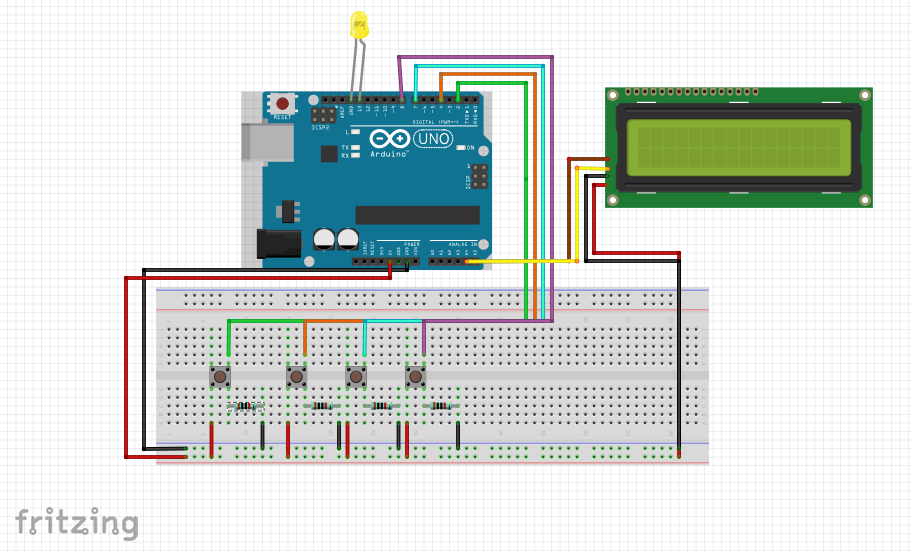
4-Desarrollo hardware
Las conexiones necesarias entre la placa BNO055 y Arduino serían:
Arduino 5V -> BNO055 VIN
Arduino GND -> BNO055 GND
ARDUINO A4 -> BNO055 SDA
ARDUINO A5 -> BNO055 SCL

5-Desarrollo software
6-Problemas encontrados
A la hora de crear el proyecto, nos hemos encontrado con los siguientes problemas:
-En primer lugar, estuvimos dos semanas sin poder avanzar ya que el Arduino no nos reconocía la IMU. Debido a esto, decidimos comprar una nueva, por lo tanto, tuvimos que esperar a probar la nueva. Probando la nueva IMU nos seguía dando el mismo problema, así que recopilando información nos dimos cuenta de que el problema no era de la IMU sino de que no la habíamos soldado.

Aquí no estaba soldada…
Una vez soldada, ya se reconocía el movimiento. Y por fin, funcionó:
-Esto nos llevó al siguiente problema: no conseguíamos que se moviera la escena en Blender. Esto se debía a que usamos un script en Python que estaba hecho para Linux y tuvimos que realizar una serie de modificaciones para que funcionara en Windows.
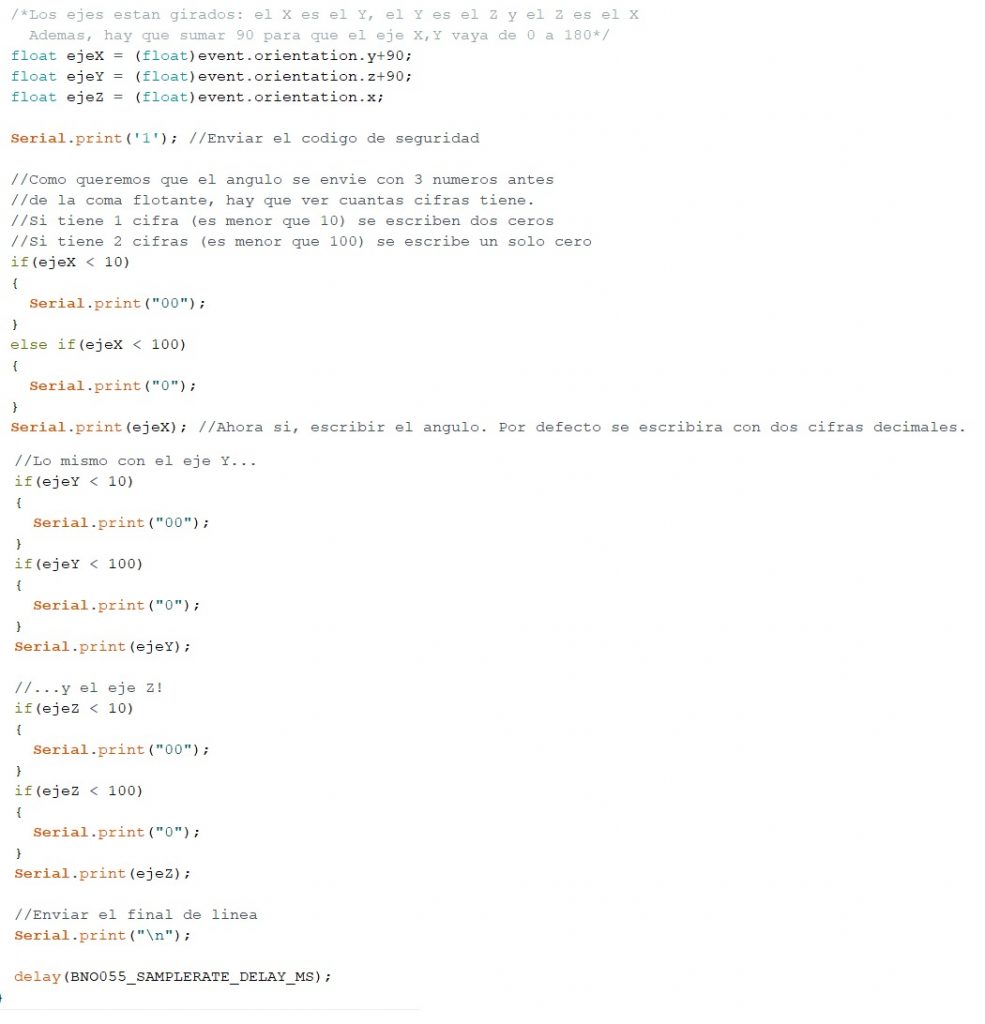
-Una vez hecho esto, nos encontramos con el problema de los ejes. Tuvimos que ir probando los ángulos a modo de ensayo y error hasta por fin conseguir la combinación de ángulos deseada para ajustarse con el movimiento del cliente.
7-Mejoras del proyecto
Las mejoras que se pueden incorporar a nuestras gafas «ARDUVISIÓN» son:
-Hacer las gafas más ligeras ya que al usarlas durante mas tiempo se empiezan a caer de la cabeza.
-Incorporar un sensor que pueda detectar los movimientos al andar.