Caja clasificadora de pastillas Arduino
INTRODUCCIÓN
El proyecto consiste en una caja clasificadora de pastillas por colores. Las piezas están diseñadas en contrachapado, excepto el tubo por donde se introducen caramelos de colores (simulando las pastillas) que es de cristal/plástico.
COMPONENTES
- Contrachapado
- Tubo de cristal/plástico
- Cables
- Cola
- Superglu
- Sierra
- Servo motor (x2)
- Lector de colores
- Placa arduino
- Protoboard
Montaje de la Caja Clasificadora de pastillas
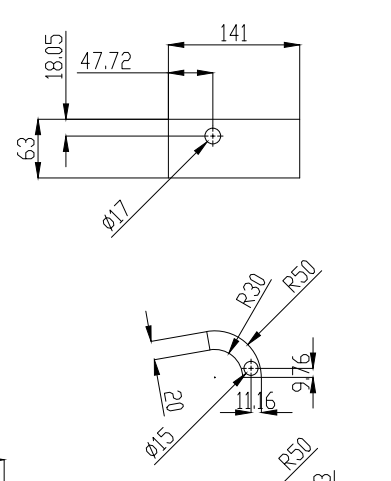
En primer lugar, comenzamos las mediciones para realizar las piezas correspondientes a la estructura externa y las distintas piezas que conforman la estructura interna.
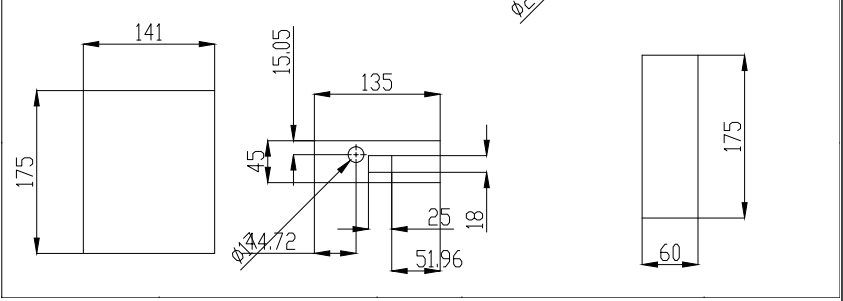
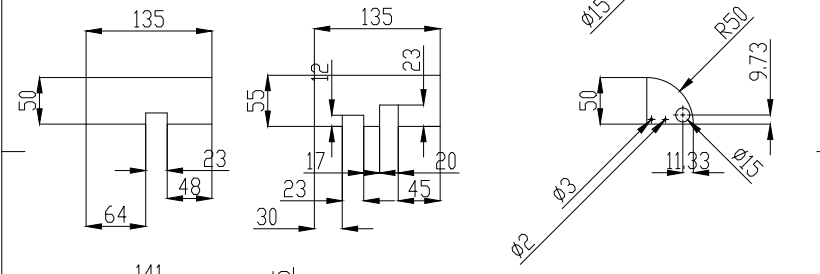
Una vez realizadas las mediciones, cortamos todas las piezas y comenzamos su montaje.
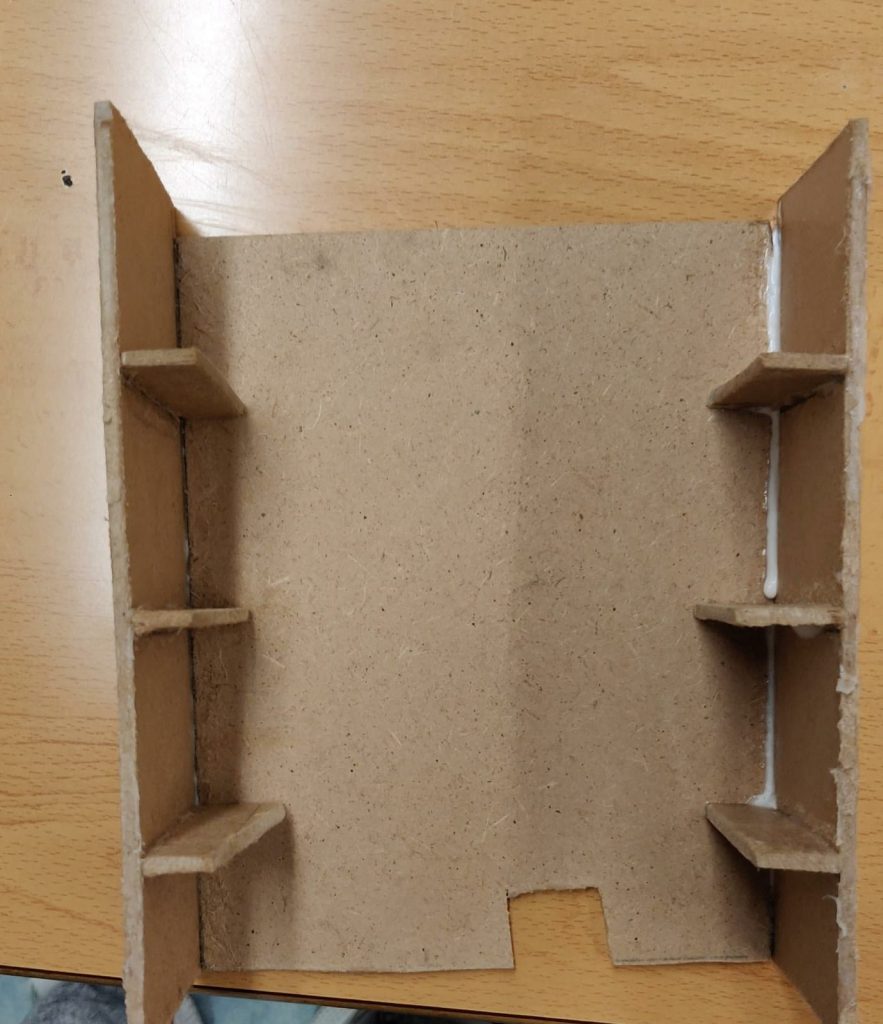
Lo primero es montar la estructura externa que esta formada por una pieza que hace de fondo y dos piezas que son los laterales de nuestra caja y que estarán pegados con cola. Además, a las dos piezas de los laterales hay que añadirles tres piezas pequeñas respectivamente para que posteriormente puedan sujetar las tres baldas donde se colocaran el sensor y los dos servo motores.
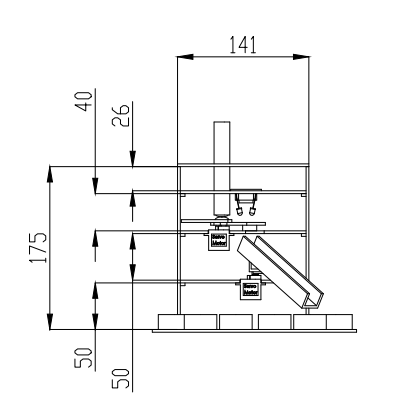
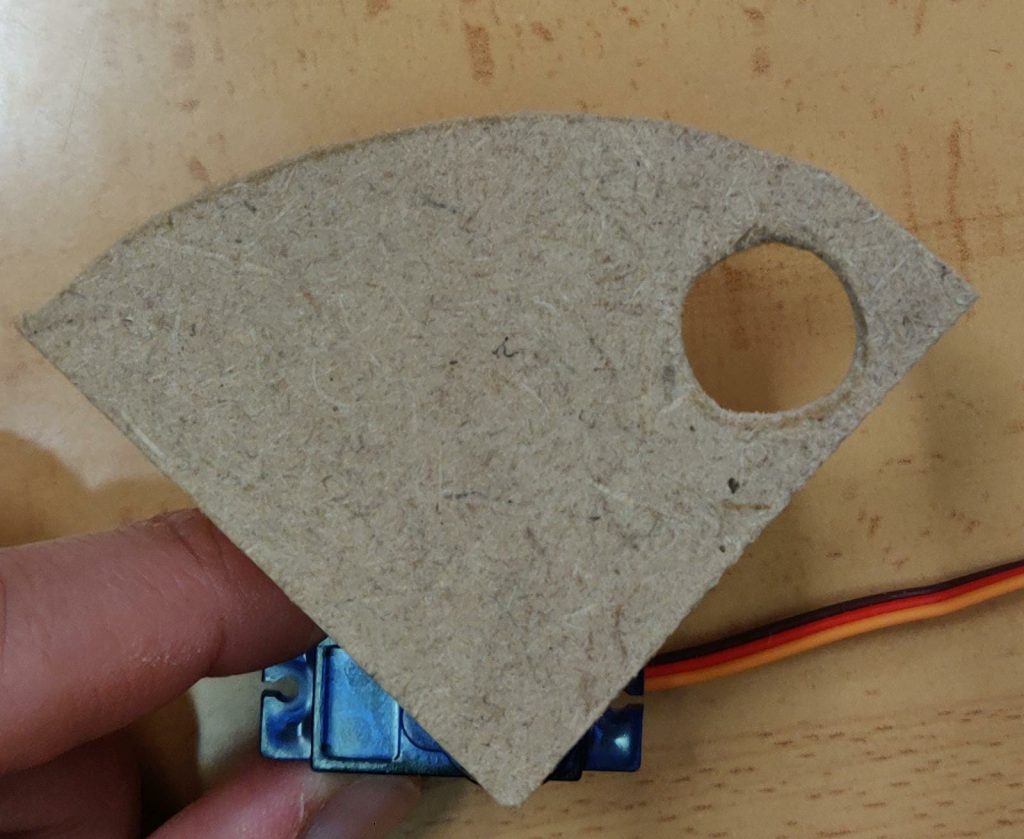
En cuanto a la estructura interna, tenemos tres baldas. En la primera balda irá colocado nuestro sensor de colores y el tubo por donde se introducen los caramelos. La segunda balda estará formada por un servo motor, y unido a esté una pequeña plataforma (con forma redondeada ) que permitirá arrastrar los caramelos. La tercera balda consta de un servo motor y conectado a él la rampa por donde se deslizarán los caramelos.



Una vez tenemos la estructura, comienza el montaje del circuito. El circuito cuenta con una placa de arduino, dos servo motores y un lector de colores. Las conexiones serán las siguientes:
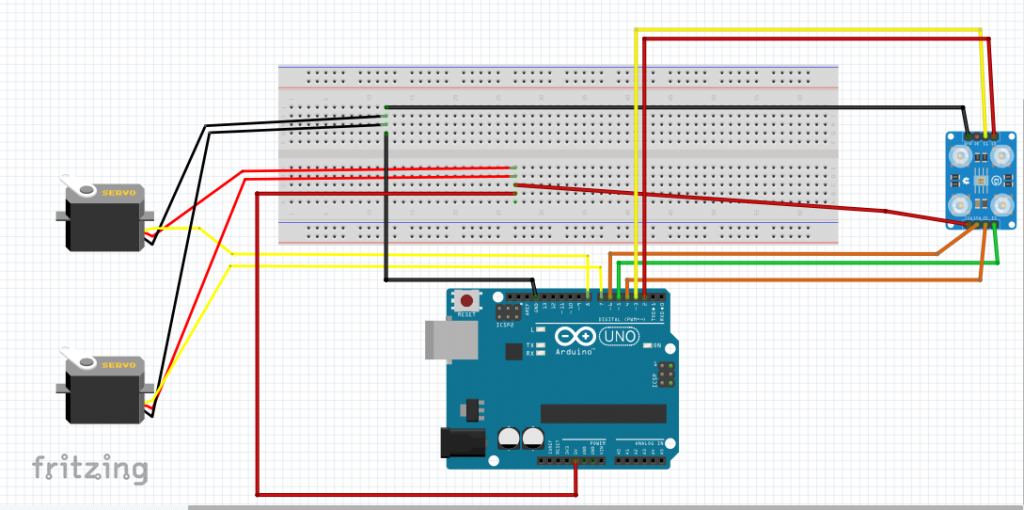
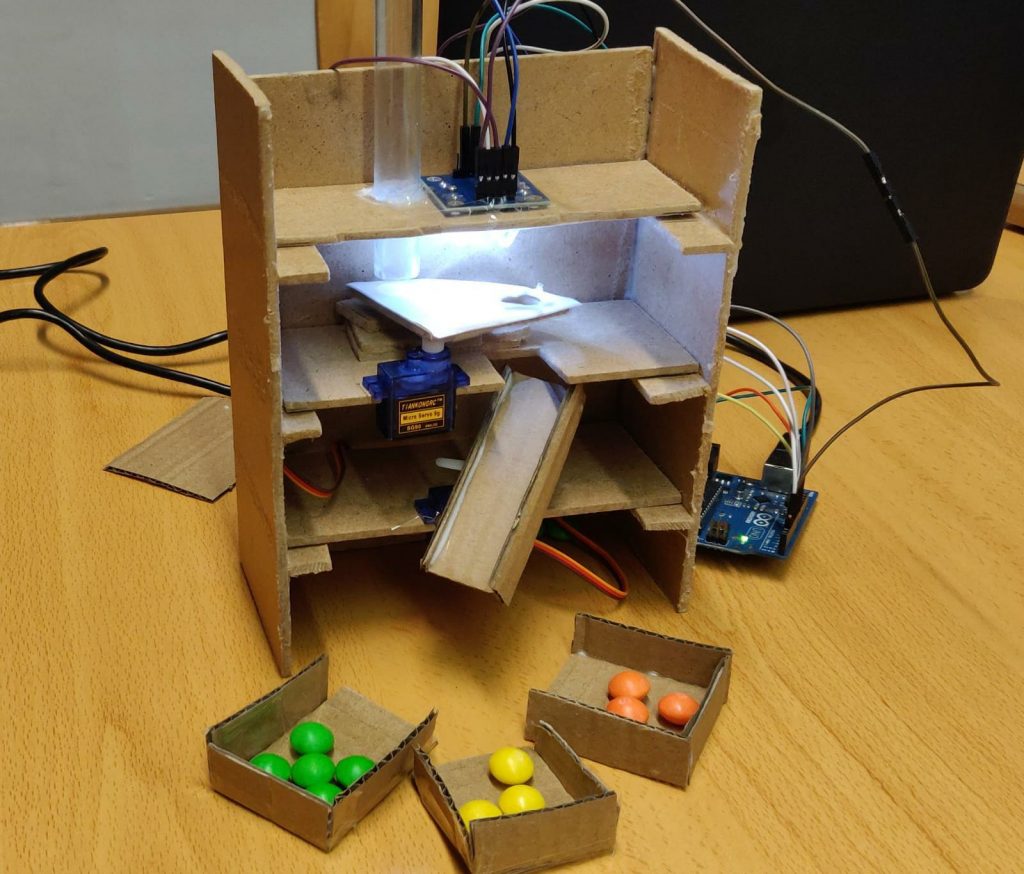
Imagen del proyecto final
CÓDIGO
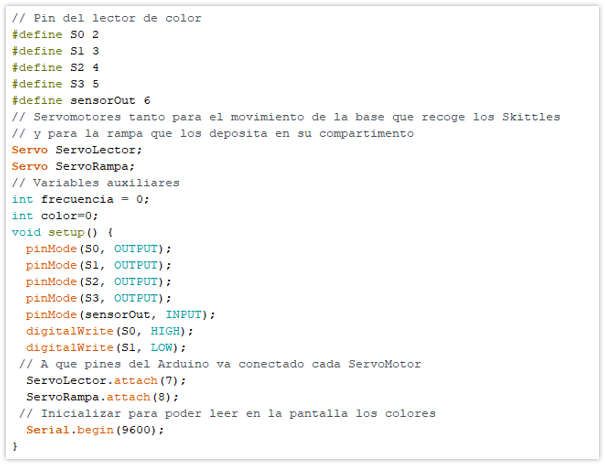
Es un código fácil a simple vista, aunque tiene ciertas complicaciones que se explicarán a continuación. Lo primero que tenemos que hacer es definir los pines donde va conectado el sensor de color y definir los servo motores. Además, definimos una variable auxiliar denominada “color” para posteriormente usarla para mover
la rampa.
la rampa.
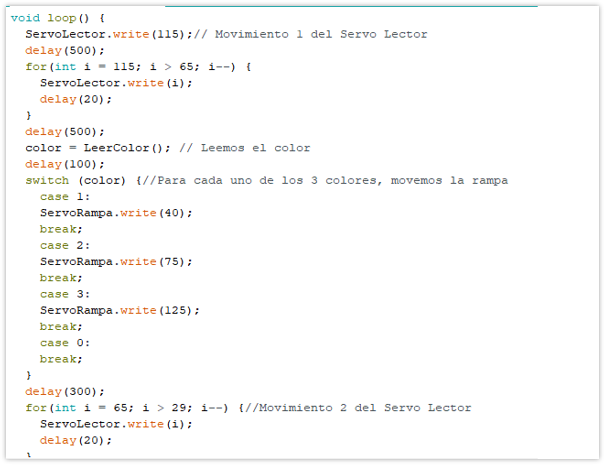
En cuanto al loop, definimos un primer movimiento del servomotor para que vaya a una posición origen. Desde esta posición origen y mediante un bucle for, movemos el servomotor hasta el sensor de color, recogiendo por el camino un caramelo. Una vez llegados a este punto y mediante la función “LeerColor”, leemos el color y dependiendo del color que nos devuelva movemos la rampa hacia un lado u otro. Una vez leído el color y movido la rampa, desplazamos de nuevo el sensor con el caramelo hasta la propia rampa, de nuevo con un bucle for, donde cae hacia un recipiente.
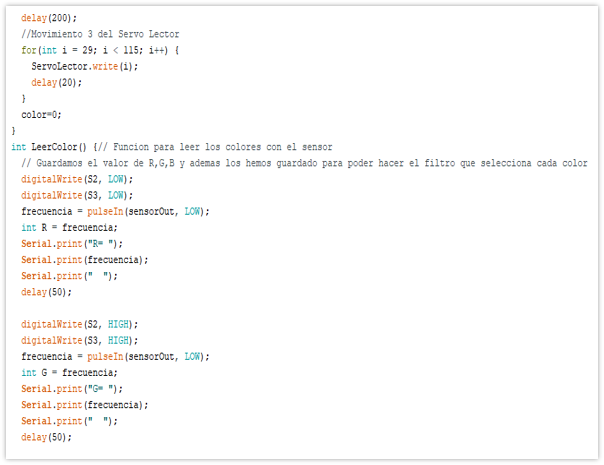
Una vez ha soltado el caramelo, volvemos a la posición origen con un nuevo bucle for y repetimos el
proceso.
proceso.
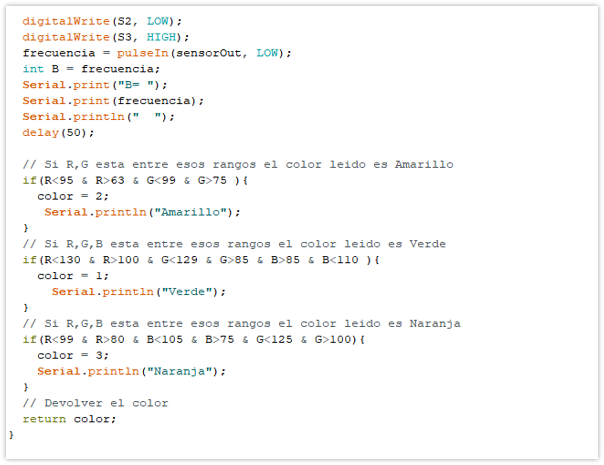
En cuanto a la función “LeerColor” tomamos como referencia los colores rojo, verde y azul. Para ello, nuestro programa nos muestra por pantalla los valores de estos colores. Una vez tenemos dichos valores generamos tres condiciones if. En estos bucles if tenemos unos rangos donde se encuentran estos tres colores, dependiendo del valor obtenido por el sensor de color entramos en una condición u en otra. Cuando entramos en estas condiciones, escribimos por pantalla el color leído y devolvemos un número para poder mover la rampa como se ha comentado anteriormente.
PROBLEMAS ENCONTRADOS
El principal problema encontrado ha sido la estructura debido a que es pequeña y bastante delicada, además, al tener que realizar los cortes por nuestra cuenta, las piezas con círculos o semicircunferencias han sido complicadas de realizar. Por otro lado, la realización de la rampa ha sido bastante costosa debido a que en un principio la hicimos con contrachapado pero debido a su tamaño no entraba entre las dos baldas y el servomotor no era capaz de moverla.
Finalmente, en cuanto al código hemos tenido numerosos problemas. En primer lugar, los movimientos de los servomotores, debido a que hay que calibrarlos para que el movimiento realizado no chocara con la estructura externa. Esto, sobre todo, nos afecto a la rampa ya que en ocasiones hacía un movimiento demasiado grande y quedaba dentro de la propia estructura externa. Por otro lado, la calibración del sensor de color es bastante sensible a la luz y dependiendo de la iluminación de la habitación toma unos valores u otros y puede que lea bien o no los caramelos.
MEJORAS
Las posibles mejoras son el aumento del tamaño de la estructura para que tenga mayor presencia e impacto a la sociedad. Otra mejora sería la de que se puedan leer más colores, que sea más preciso el lector de color y que no dependa tanto de la iluminación de la habitación. Por último, que sea capaz de tomar de analizar pastillas mas grandes o mas pequeñas.
CONCLUSIONES
Este proyecto nos ha llevado más tiempo del esperado debido a que en un principio la estructura parecía más simple de hacer de lo que en la práctica ha sido. Además, el sensor ha dado numerosos problemas como ya se ha explicado anteriormente. Finalmente, gracias a este proyecto hemos conseguido aprender que con esta tecnología se puede realizar un gran número de proyectos y que no es complicado dicha realización.


