Carduino
1. INTRODUCCIÓN
1.1 Grupo e integrantes
Proyecto realizado por el grupo 5 del campus de Móstoles. Los integrantes son:
- Cristina Varas Menadas
- Alfonso Luis Rodríguez Bernal
1.2 Presentación del proyecto
- Modo automático apoyado en un sensor de movimiento para sortear obstáculos y evitar choques.
- Modo de seguimiento de líneas, que gracias a un pequeño módulo colocado en la parte inferior puede detectar la reflectancia de la luz.
- Iluminación delantera: 2 leds que se iluminan solo en caso de que hay poca luz.
- Iluminación trasera: 2 leds rojos que se iluminan cuando el coche se encuentra parado y parpadean cuando da marcha atrás. Además, hemos incorporado una matriz de leds de 8×8 que indicarán de forma simbólica la dirección del coche.
1.3 Materiales
- Placa Arduino
UNO R3 x1 - Cable USB x1
- Placa de
extensión x1 - Placa de
control de motores L298N x1 - Sensor ultrasónico
x1 - Servo motor
x1 - Placa fija
motor x1 - Módulo de
seguimiento de línea x1 - Motores x4
- Mando Remoto
x1 - Cargador para
las baterías x1 - Caja para las
pilas x1 - Baterías x2
- Cinta x1
- Cuñas de
separación x8 - Placas x2
- Ruedas x4
- Tornillos y
tuercas - Bloques de aluminio
x4 - Columnas de
cobre x4 - Cables DuPo
- Leds rojos x2
- Matiz de leds
8×8 x1 - Leds blancos x2
2. DESARROLLO DEL PROYECTO
2.1. Construcción y montaje


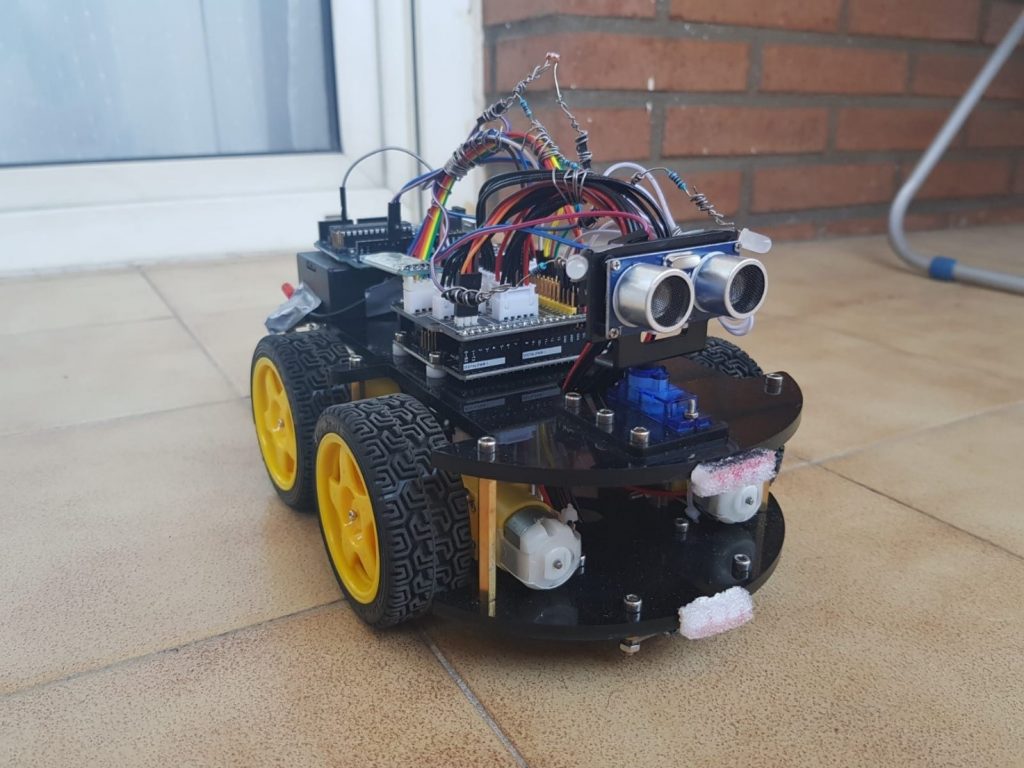
Como se puede ver en la imagen, en esta placa inferior hemos colocado cuatro motores, que irán conectados a la placa L298N, la cual se encargará de alimentar los motores para darles movimiento.
En esta placa ionferior también irá colocado el módulo de seguimiento de línea para que el coche pueda recorrer circuitos que nosotros pintemos en el suelo.

Y con esto ya concluiríamos el montaje de esta primera placa del coche. Podemos pasar a la plataforma superior. En ella hemos colocado el Arduino. Dado que hemos añadido muchas funcionalidades, hemos necesitado una placa de expansión. En la imagen siguiente podemos ver ambas placas ensambladas. Además, en esta misma plataforma hemos colocado el sensor ultrasónico, que nos permitirá proteger al coche de choques y golpes, pues con él podremos detectar objetos que se encuentren en la dirección del movimiento (las dos imágenes a continuación).
 |
| Placa superior |
|
| Módulo de seguimiento |
 |
| Servomotor |
También hemos añadido iluminación al coche. Se compone de:
- Dos leds rojos en la parte trasera, que se encenderán cuando el coche se encuentre parado, y además parpadearán si el coche da marcha atrás-
- Una matríz de leds de 8×8 en la parte trasera que indicará mediante dibujos indicativos la dirección del coche en función de su movimiento.
- Dos leds blancos en la parte delantera a modo de faros del coche que se encenderán cuando la luz ambiental sea baja.
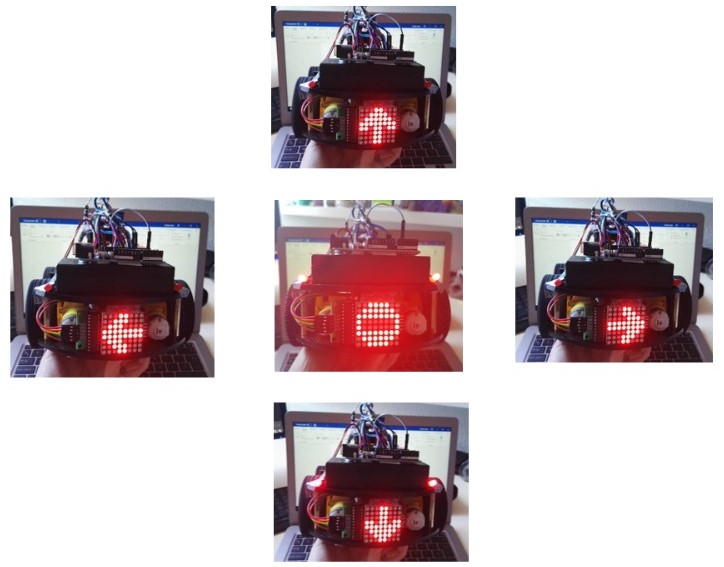 |
| Iluminación trasera |
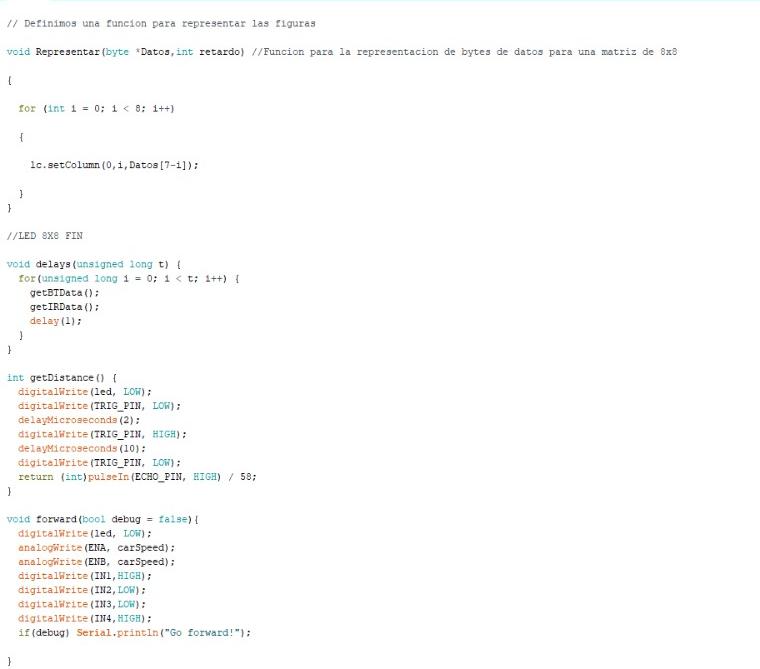
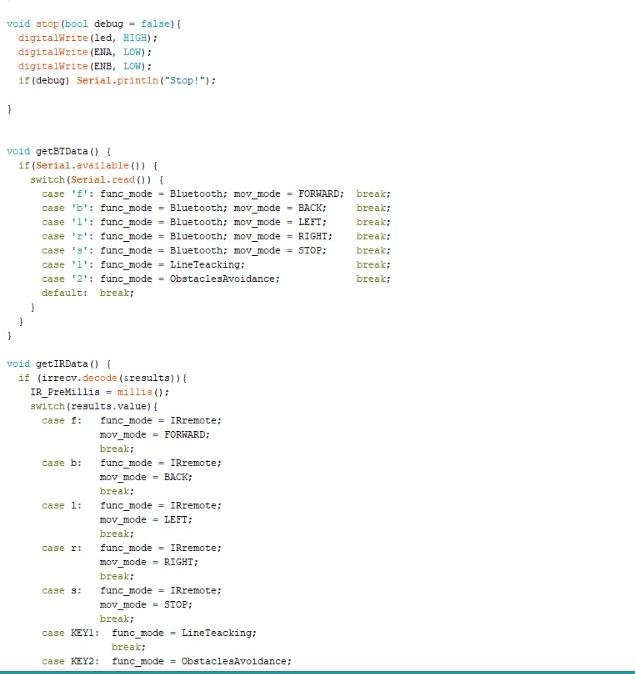
2.2. Código






3. PROBLEMAS ENCONTRADOS
4. POSIBLES MEJORAS
- Mejorar la sensibilidad del control remoto, pues a partir de una distancia media, deja de responder.
- En cuanto al movimiento, la velocidad de cambio de dirección y que se pueda girar ligeramente hacia la izquierda o la derecha mientras el coche se desplaza hacia delante.
- Mejorar la sensibilidad del servomotor en cuanto a la detección de obstáculos. Debido al pequeño ángulo de detección, si va en dirección de un objeto no muy voluminoso en anchura, lo más probable es que se choque, aunque sea lateralmente.
- Mejorar la circuitería en algunos de los componentes, debido al problema con el soldador que mencionábamos anteriormente.
