Comedero automático
Somos Rodrigo Marqués Buil y Antonio Cuadrado Álvarez, integrantes del grupo 8 y vamos a presentaros nuestro proyecto de la asignatura de Sistemas Empotrados y de Tiempo Real. En nuestro caso hemos decidido hacer un comedero automático funcional para cualquier tipo de animal con materiales principalmente reciclados, y adaptable para que cualquier usuario pueda realizarlo en su casa.
Introduccion
El propósito de este proyecto es montar un comedero automático para mascotas, que tenga
capacidad para que el usuario pueda alimentar a su mascota cuando así lo desee, y en caso de
que sea necesario de que la mascota se encuentre sola en casa, o simplemente tenga hambre,
pueda autoalimentarse. Para evitar que la mascota se genere un problema de
sobrealimentación, es importante remarcar que la mascota puede echarse comida solo cada
cierto tiempo, en cambio, el dueño puede alimentar a su animal siempre que así lo desee, dando
capacidad para administrar el dispositivo con completa libertad.
El objetivo más allá de realizar la versión final del comedero para entregar es indicar una serie
de mejoras que hemos pensado que tienen capacidad para ampliar y mejorar el proyecto.
Nuestro objetivo con respecto a este apartado es completar al máximo las funcionalidades del
comedero, siendo totalmente funcional. Sin embargo, nos hemos centrado en indicar mejoras
más relacionadas con la calidad de los materiales, la durabilidad y su independencia y
comodidad, lo que nos ha permitido centrarnos en realizar un diseño electrónico algo más
complejo.
Por último, cabe destacar que durante la memoria también se explicará el proceso de creación
del proyecto y los problemas que nos hemos encontrado, el coste de los materiales, ideas
descartadas, diseño hardware, software y físico, casos de uso y reparto de tareas.
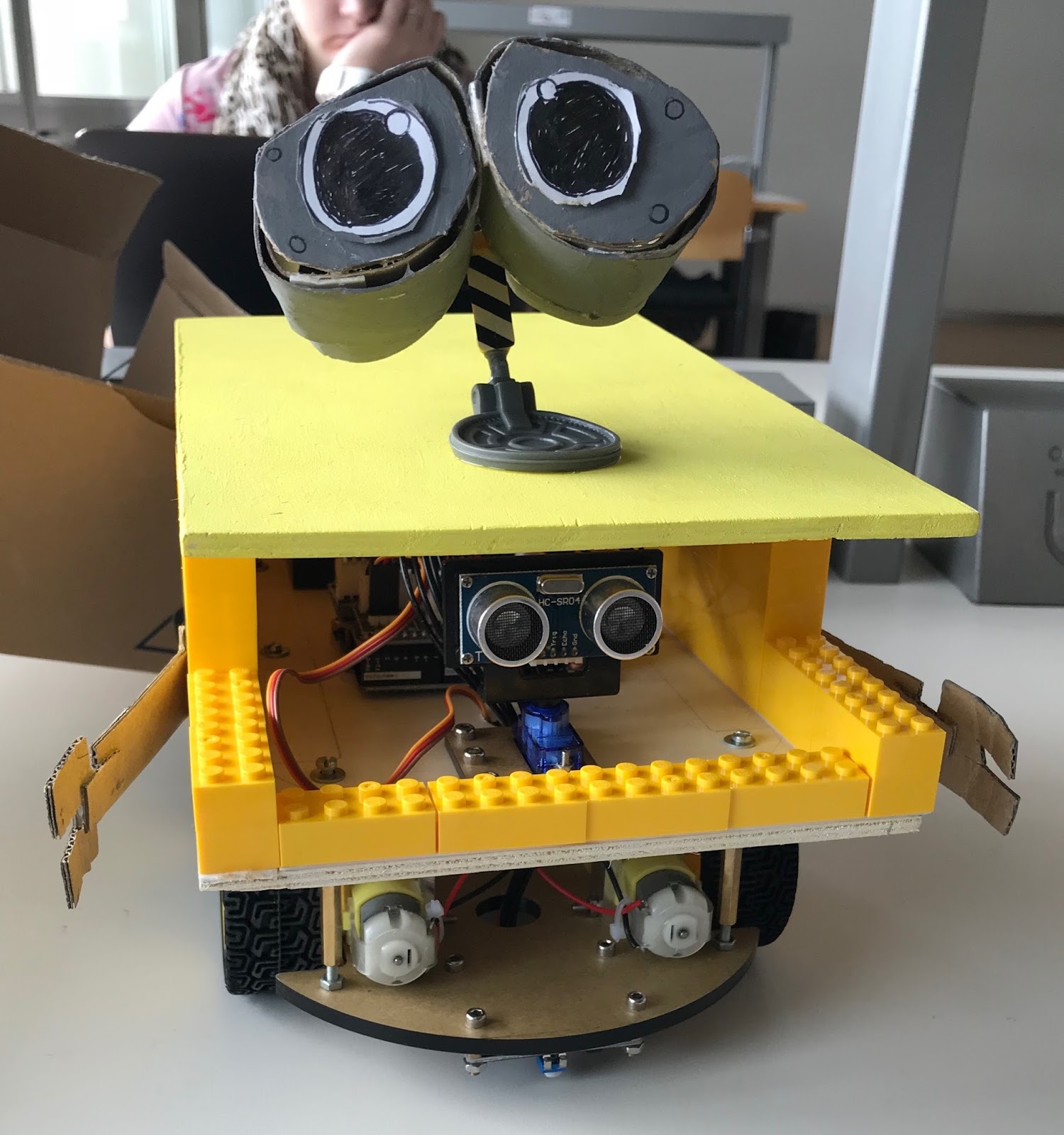
Materiales Físicos
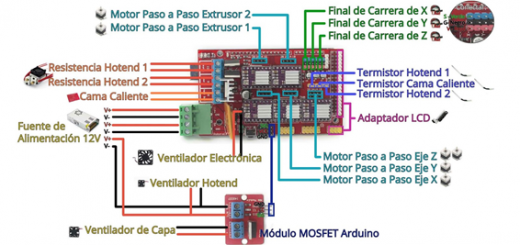
Conexiones Arduino

Materiales Arduino
- 1 servomotor
- 2 sensores ultrasonidos
- 1 botón
- 1 sensor LDR
Conclusiones generales
Tras terminar la práctica estamos bastante satisfechos con el trabajo realizado. Si bien es cierto
que no fuimos capaces de utilizar el mando a distancia, hemos sido capaces de sustituirlo por
una solución equivalente. Además, hemos comprendido con bastante facilidad el uso de muchos
componentes de Arduino, y esto nos ha permitido poder terminar una práctica basada en varios
componentes interconectados, que tal vez no tengan las capacidades físicas por los materiales
de la caja y la botella escogidos, pero si vemos una electrónica compleja con un software
cómodo, sencillo, y adaptable en varios puntos a los usuarios que quieran utilizarlo.
Nuestro gran objetivo siempre fue ese, hacer un proyecto que sea complejo en cuanto a
electrónica, y que otros compañeros o usuarios del blog puedan replicarlo en sus casas si así lo
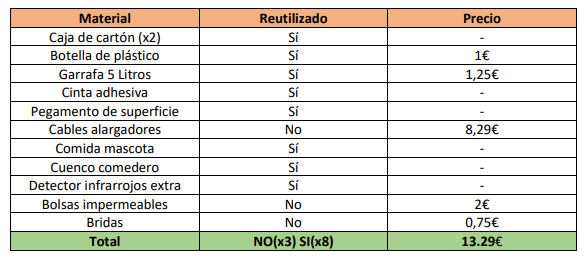
desean. Ya dejamos a disposición de los nuevos usuarios del comedero automático el
presupuesto que quieran destinar a utilizar mejores materiales. Además, como se indicará a
continuación, vamos a dejar indicadas ideas descartadas y posibles mejoras que vemos con
claridad que podrían aprovechar este grupo de personas.
Por último, cabe destacar que el desarrollo de la práctica ha sido fluido y satisfactorio. Aunque
al final nos hemos visto un poco más ralentizados por los materiales físicos baratos y las
consecuentes modificaciones que hemos realizado para adaptarnos, el meollo electrónico de la
7
práctica siempre ha tenido un desarrollo incremental y correcto hasta que lo hemos terminado.
En este sentido, estamos bastante contentos con la perspectiva final que nos ha dejado trabajar
en esta asignatura.
Ideas Descartadas
A priori pensamos en atar la botella a la pata de una mesa, pero para la demostración y
poder trabajar en las horas de clase, era bastante complicado llegar a hacer esto.
Dejamos a disposición de futuros usuarios que puedan ver esta idea factible si quieren
darle un uso práctico y real al comedero.
Poner una especie de rampa entre la salida de la botella y el cuenco del comedero es
una opción bastante viable para evitar errores. Si la mascota se acerca a comer, pasa el
tiempo necesario para que el detector de infrarrojos vuelva a detectar, termina su
comida para que la salida de luz sea superior al límite, y el animal está, por ejemplo,
lamiendo su cuenco o se ha quedado quieto, cabe la posibilidad de que le caiga la
comida en la cabeza. Con esta idea de la rampa evitamos esto. Además, también
ayudaría a mejorar la eficiencia del comedero y la tapa del servomotor, y modularizar
los componentes físicos como son el cuenco y la caja de cartón con sus componentes.
Pensamos en hacer una aplicación web para controlar el comedero, pero lo vimos
verdaderamente excesivo para completar el proyecto, porque no estamos seguros de
que muchos usuarios quieran controlar la comida de su mascota a través de su
ordenador.
Posibles Mejoras
Cambiar el botón por un mando a distancia y un receptor que no perciba señales de
los demás componentes de Arduino.
Construir el proyecto en una caja más resistente. Probablemente madera o algún tipo
de plástico sea más adecuado.
Pensar en un recipiente más estable para guardar el pienso, y con una boca más
ancha.
Añadir una rampa para que la comida viaje desde la apertura de la botella hasta el
comedero para aportar maniobrabilidad al proyecto.
Poder enviar señales desde tu teléfono móvil para activar el comedero añadiendo un
receptor WI-FI o Bluetooth.
Adaptar mejor y hacer más estable la tapa de la botella con el servomotor. Sugerimos
emplear un material distinto al cartón para obtener más peso máximo cargable y
repensar la disposición del componente.
Soldar los cables para obtener más sujeción.
Modificar el código para que el LED se apague a ciertas horas (de noche).
Modificar el código para añadir un componente que cuente las horas según la del
portátil, ya que nos aportaría la posibilidad de definir a qué horas queremos que se
abra el comedero de manera prefijada.