Dealerino.
Dealerino
Grupo 1. SEyTR – Móstoles 2016-2017
Integrantes
Javier López Rubio
Alberto Martín-Benito Muñoz
Jesús Santiago Rico Plana
Manuel Viejo Fernández
|
ÍNDICE
1.
INTRODUCCIÓN
Nuestro proyecto consiste en la construcción, montaje y
puesta en marcha, de un repartidor de cartas para poder jugar al blackjack
(aunque sería posible poder configurarlo para poder jugar a otros juegos de
cartas distintos como puede ser el póker). El mecanismo es automático y también
controlado por una aplicación para Smartphone Android, cuyo nombre hemos
elegido el mismo que el del título del proyecto.
puesta en marcha, de un repartidor de cartas para poder jugar al blackjack
(aunque sería posible poder configurarlo para poder jugar a otros juegos de
cartas distintos como puede ser el póker). El mecanismo es automático y también
controlado por una aplicación para Smartphone Android, cuyo nombre hemos
elegido el mismo que el del título del proyecto.
Es una estructura capaz de girar para enfocar hacia los
distintos jugadores (según sea el número de estos), extraer cartas de una en
una y lanzarlas mediante una rueda que está en constante movimiento.
distintos jugadores (según sea el número de estos), extraer cartas de una en
una y lanzarlas mediante una rueda que está en constante movimiento.
En cuanto a los posibles fines a los que podría estar destinado
hay que destacar dos muy diferenciados, para un uso doméstico entre amigos y/o
familiares, o para un uso en casinos o casas de apuestas realizando mejoras en
la estructura para que resulte más atractivo y para tapar todo el cableado.
Dentro del uso en un ámbito profesional iría destinado sobre todo para personas
con cierta discapacidad, ya que los croupiers podrían manejarlo y realizar las
funciones con una sola mano.
hay que destacar dos muy diferenciados, para un uso doméstico entre amigos y/o
familiares, o para un uso en casinos o casas de apuestas realizando mejoras en
la estructura para que resulte más atractivo y para tapar todo el cableado.
Dentro del uso en un ámbito profesional iría destinado sobre todo para personas
con cierta discapacidad, ya que los croupiers podrían manejarlo y realizar las
funciones con una sola mano.
2.
COMPONENTES
El listado o tabla de componentes por precio es el siguiente:
Componente o material |
Precio |
Arduino Uno (x2) |
– * |
Cartas |
– * |
Micro motor 3V CC |
3.65 € |
Soporte para cartas |
10 € |
Receptor Bluetooth HC-05 |
10 € |
Madera |
6.7 € |
Cables |
– * |
Servomotor |
– * |
Ruedas |
0.85 € |
Protoboard |
– * |
Servomotor 360º |
9 € |
Resistencia 100 ohmios (x2) |
– * |
Transistor pnp 2N2222 |
– * |
App Dealerino (desarrollada por el grupo) |
– * |
Total |
40.20 € |
Siendo proporcionados o estando ya en posesión de los ítems
marcados como -*.
marcados como -*.

3.
EVOLUCIÓN DEL PROYECTO
En primer lugar queríamos conseguir el movimiento del servo para
hacer los giros necesarios antes del reparto de cartas. Para ellos hicimos una
estructura de madera pegada al servomotor de 180º por arriba para que pudiera
realizar el giro, como se puede observar en la siguiente imagen:
hacer los giros necesarios antes del reparto de cartas. Para ellos hicimos una
estructura de madera pegada al servomotor de 180º por arriba para que pudiera
realizar el giro, como se puede observar en la siguiente imagen:
Para la realización del punto anterior conectamos el
servomotor de 180º a uno de los arduino uno y lo fuimos probando según el
código que le íbamos subiendo.
servomotor de 180º a uno de los arduino uno y lo fuimos probando según el
código que le íbamos subiendo.
Lo siguiente era conseguir coger las cartas una a una de la
estructura, momento en el cual tuvimos que necesitar el servomotor de 360º. Al
principio utilizamos un enganche para ir cogiendo las cartas.
estructura, momento en el cual tuvimos que necesitar el servomotor de 360º. Al
principio utilizamos un enganche para ir cogiendo las cartas.
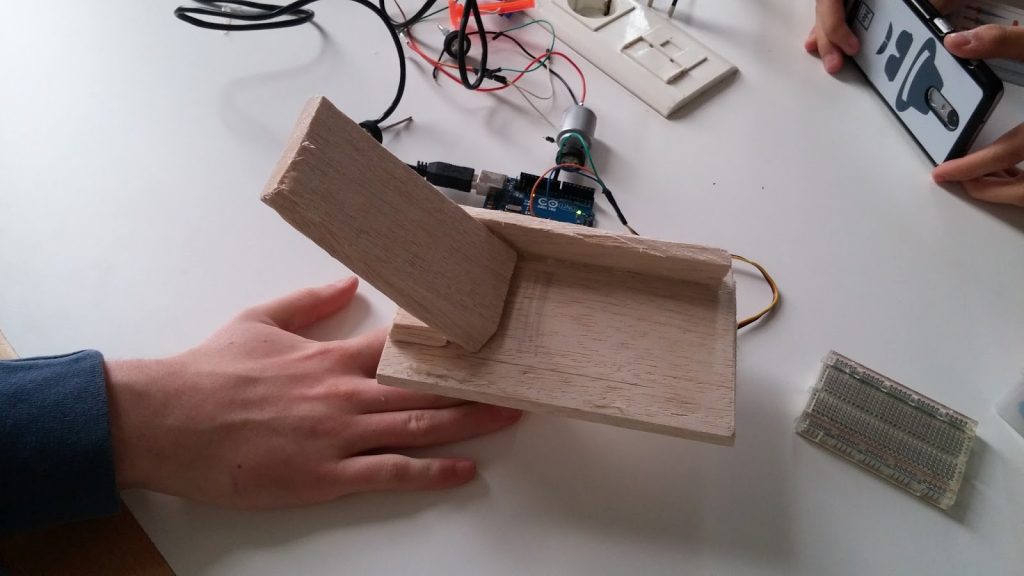
Tras muchos problemas con la madera que utilizamos al
comienzo, debido al poco peso y a la inestabilidad que presentaba, decidimos
coger un soporte que sería la nueva estructura pegada sobre una pequeña tabla
de madera que es la que iría pegada y atornillada con el servomotor de 180º. La
imagen del soporte es la siguiente:

comienzo, debido al poco peso y a la inestabilidad que presentaba, decidimos
coger un soporte que sería la nueva estructura pegada sobre una pequeña tabla
de madera que es la que iría pegada y atornillada con el servomotor de 180º. La
imagen del soporte es la siguiente:
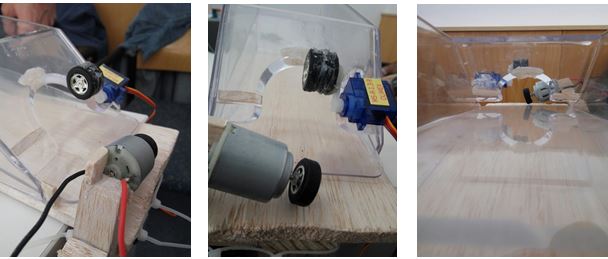
Tras tener unidos el soporte y la madera con el servo,
procedimos a pegar el servomotor de 360º al soporte de forma milimétrica y con
esfuerzo, realizando pruebas para que efectivamente cogiera cartas de una en
una y sin atascarse. Una vez hecho esto fue el momento de pegar de nuevo
milimétricamente mediante madera pero con un motor de corriente continua de 3
voltios, que adquirimos algo de tiempo atrás previendo que podríamos utilizarlo
en el lanzamiento de las cartas. Dicho motor cuenta con variación de velocidad
de rango 0 a 9, siendo 0 el reposo, y 9 la velocidad más alta que alcanza. El
resultado fue el siguiente:
procedimos a pegar el servomotor de 360º al soporte de forma milimétrica y con
esfuerzo, realizando pruebas para que efectivamente cogiera cartas de una en
una y sin atascarse. Una vez hecho esto fue el momento de pegar de nuevo
milimétricamente mediante madera pero con un motor de corriente continua de 3
voltios, que adquirimos algo de tiempo atrás previendo que podríamos utilizarlo
en el lanzamiento de las cartas. Dicho motor cuenta con variación de velocidad
de rango 0 a 9, siendo 0 el reposo, y 9 la velocidad más alta que alcanza. El
resultado fue el siguiente:
En cuanto a la conexión de los dos anteriores elementos (lo
cual está presente en el siguiente punto de la memoria), se conectó el
servomotor de 360º en la placa arduino junto con el servomotor de 180º, y se
conectó el motor en el otro arduino uno, con un par de resistencias de 100
ohmios y de un transistor para su buen funcionamiento.
cual está presente en el siguiente punto de la memoria), se conectó el
servomotor de 360º en la placa arduino junto con el servomotor de 180º, y se
conectó el motor en el otro arduino uno, con un par de resistencias de 100
ohmios y de un transistor para su buen funcionamiento.
El detalle final para el cual fuera un proyecto más
llamativo, fue la introducción de un receptor bluetooth modelo HC-05, para
poder controlar todos los movimientos a partir de una aplicación que diseñamos
para smartphones Android. Dicho receptor iría conectado junto con los
servomotores utilizados.
llamativo, fue la introducción de un receptor bluetooth modelo HC-05, para
poder controlar todos los movimientos a partir de una aplicación que diseñamos
para smartphones Android. Dicho receptor iría conectado junto con los
servomotores utilizados.
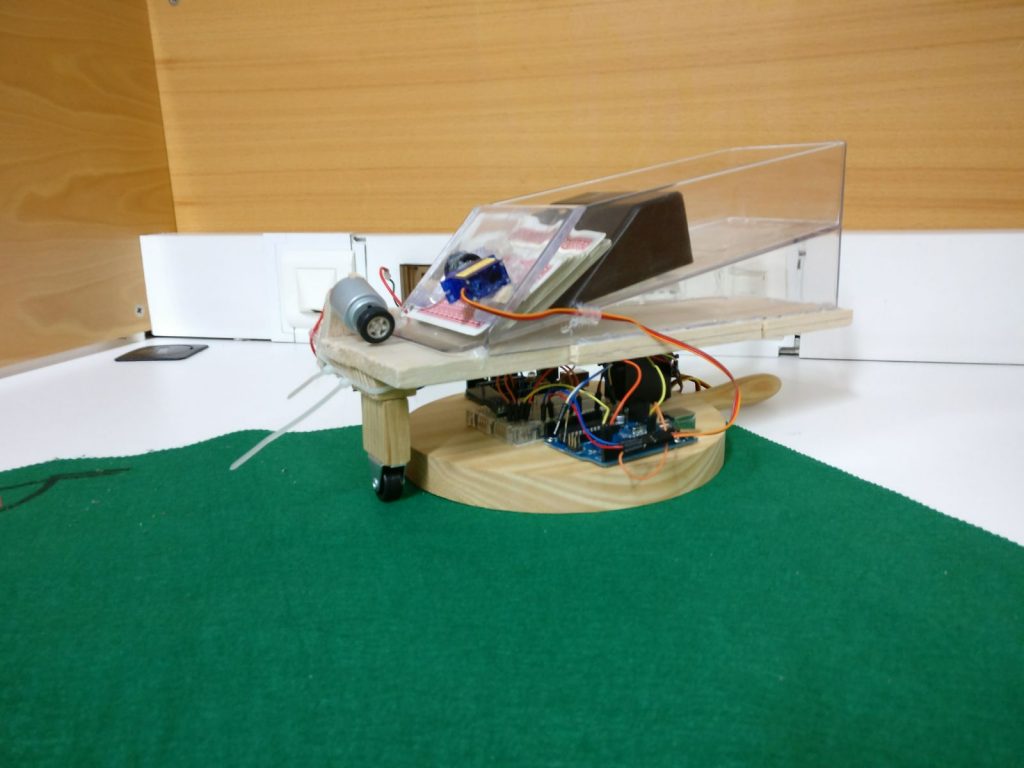
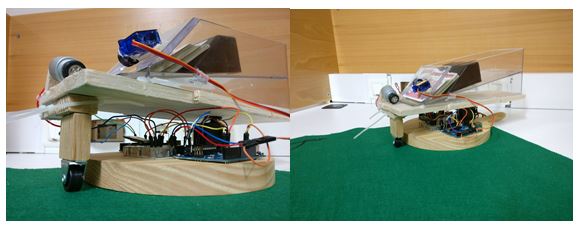
Una vez conseguido todo lo anterior lo siguiente era dejar
todas las conexiones de forma correcta y pegar la protoboard y atornillar los
arduino uno en un tablón circular de madera, por debajo de la estructura, a la
que le introducimos un listón de madera con un rodamiento para poder realizar
los giros del servomotor de 180º.
todas las conexiones de forma correcta y pegar la protoboard y atornillar los
arduino uno en un tablón circular de madera, por debajo de la estructura, a la
que le introducimos un listón de madera con un rodamiento para poder realizar
los giros del servomotor de 180º.
El resultado final se puede contemplar en las siguientes
imágenes:
imágenes:
4.
CONEXIONES
Los esquemas de conexión de los componentes con los arduino
uno y con la protoboard son los siguientes:
uno y con la protoboard son los siguientes:
El primer esquema se trata de la conexión de los dos servos
utilizados junto con el receptor bluetooth anteriormente mencionado:
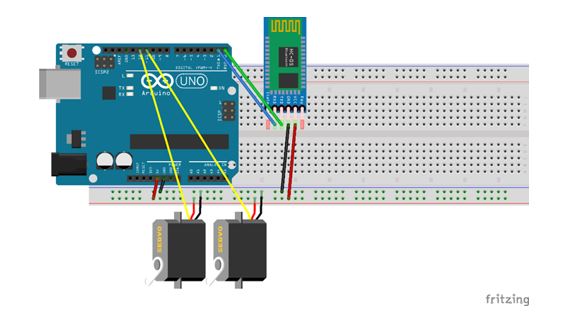
utilizados junto con el receptor bluetooth anteriormente mencionado:
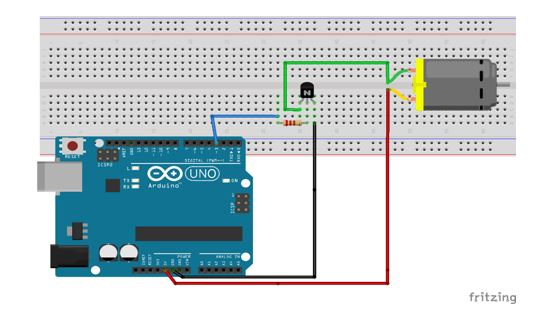
En cuanto al segundo esquema se trata de la conexión del
micro motor de 3 voltios con el otro arduino en la misma placa protoboard que
la anterior. Decidimos separarlo porque contábamos con dos arduino uno
prestados y para que no perdiera velocidad de giro el propio motor. Dicho
esquema es el siguiente:
micro motor de 3 voltios con el otro arduino en la misma placa protoboard que
la anterior. Decidimos separarlo porque contábamos con dos arduino uno
prestados y para que no perdiera velocidad de giro el propio motor. Dicho
esquema es el siguiente:
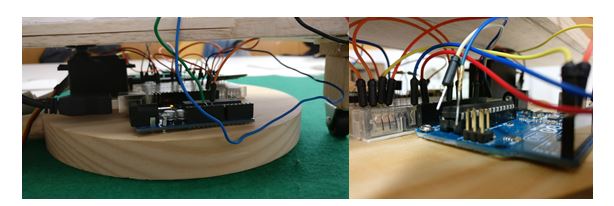
Las imágenes reales de las conexiones, una vez organizado y
colocado todo son las siguientes:
colocado todo son las siguientes:
5.
PROBLEMAS Y SOLUCIONES
Fueron varios los problemas surgidos durante la elaboración
del “dealerino”, y quedan enumerados en función del orden en que fueron
surgiendo:
del “dealerino”, y quedan enumerados en función del orden en que fueron
surgiendo:
1)
Construcción de la estructura inicial: Debido al
poco peso, a la inestabilidad, y a los quebraderos de cabeza que surgieron a la
hora de pensar en cómo ir sacando cartas de una en una, decidimos pensar y
realizar la siguiente solución: Adquirir
un soporte de cartas para tenerlas colocadas de forma óptima y con un peso
incluido.
Construcción de la estructura inicial: Debido al
poco peso, a la inestabilidad, y a los quebraderos de cabeza que surgieron a la
hora de pensar en cómo ir sacando cartas de una en una, decidimos pensar y
realizar la siguiente solución: Adquirir
un soporte de cartas para tenerlas colocadas de forma óptima y con un peso
incluido.
2)
Limitaciones del servomotor en la extracción de
cartas: debido a que con un servomotor de 180º no conseguíamos ir sacando las
cartas, ya que iba de adelante hacia atrás y viceversa, decidimos esta otra solución: adquirir un servomotor
de rotación continua o 360º.
Limitaciones del servomotor en la extracción de
cartas: debido a que con un servomotor de 180º no conseguíamos ir sacando las
cartas, ya que iba de adelante hacia atrás y viceversa, decidimos esta otra solución: adquirir un servomotor
de rotación continua o 360º.
3)
Montaje de los componentes en la estructura: Fue
largo el proceso de montaje debido que a veces al pegar de una manera el
servomotor de 360º no extraía las cartas y quedaba atascado, y lo mismo sucedía
con el motor de 3 voltios, el cual contaba con el factor negativo de la
vibración por el movimiento.
Montaje de los componentes en la estructura: Fue
largo el proceso de montaje debido que a veces al pegar de una manera el
servomotor de 360º no extraía las cartas y quedaba atascado, y lo mismo sucedía
con el motor de 3 voltios, el cual contaba con el factor negativo de la
vibración por el movimiento.
Solución:
Pegar de forma cuidadosa ambos componentes en la estructura y para el caso del
motor, hacerlo con la ayuda de trozos de madera y bridas, todo con su
consiguiente pegamento de cola con una pistola termofusible.
Pegar de forma cuidadosa ambos componentes en la estructura y para el caso del
motor, hacerlo con la ayuda de trozos de madera y bridas, todo con su
consiguiente pegamento de cola con una pistola termofusible.
4)
Otro gran problema surgido fue que los movimientos
de los servomotores no eran totalmente exactos, posiblemente en el caso del
servomotor de 180º por la fuerza ejercida y la vibración producida al girar del
fin al comienzo de forma rápida, y en el caso del servomotor de 360º, por la
poca presión necesaria para ir sacando las cartas.
Otro gran problema surgido fue que los movimientos
de los servomotores no eran totalmente exactos, posiblemente en el caso del
servomotor de 180º por la fuerza ejercida y la vibración producida al girar del
fin al comienzo de forma rápida, y en el caso del servomotor de 360º, por la
poca presión necesaria para ir sacando las cartas.
Solución:
Tras revisiones en el código utilizado, en el primer servomotor, atornillarlo a
la estructura, y en el segundo, el de 360º, actualizar la aplicación para que
se pudiera girar las veces que queramos cuando pidamos carta, ya que en muy
pocas ocasiones, se daba el caso de que el giro no completaba la extracción de
una carta.
Tras revisiones en el código utilizado, en el primer servomotor, atornillarlo a
la estructura, y en el segundo, el de 360º, actualizar la aplicación para que
se pudiera girar las veces que queramos cuando pidamos carta, ya que en muy
pocas ocasiones, se daba el caso de que el giro no completaba la extracción de
una carta.
6.
POSIBLES MEJORAS
Las mejoras planteadas que podrían ser muy útiles son las
siguientes:
siguientes:
•
Reducción de costes de producción a la hora de
la fabricación de la estructura y de la madera utilizada, y del uso de
solamente un arduino uno para las conexiones, o en su defecto de un arduino
mega.
Reducción de costes de producción a la hora de
la fabricación de la estructura y de la madera utilizada, y del uso de
solamente un arduino uno para las conexiones, o en su defecto de un arduino
mega.
•
Lector de códigos QR para cada carta para ir
llevando un recuento de las cartas por cada jugador
Lector de códigos QR para cada carta para ir
llevando un recuento de las cartas por cada jugador
•
Llevar un seguimiento de la partida y
registrarla a partir del punto anterior.
Llevar un seguimiento de la partida y
registrarla a partir del punto anterior.
•
Implementación para elegir al comienzo juegos
distintos en la aplicación y poder tener más variedad
Implementación para elegir al comienzo juegos
distintos en la aplicación y poder tener más variedad
•
Sonidos al repartir, al ganar y al comenzar a
jugar.
Sonidos al repartir, al ganar y al comenzar a
jugar.
Memoria, presentación con transparencias, código y aplicación android: Enlace a Drive

