El cochemopa
EL COCHE MOPA
Integrantes del proyecto
Presentación del proyecto
Materiales y componentes requeridos
Desarrollo
Vídeo explicativo
Problemas y soluciones propuestas.
Resultado y funcionamiento.
Futuras mejoras
Conclusión
1.
Integrantes del proyecto
informática y administración y dirección de empresas de cuarto año compuesto
por:
Daniel Fernández García
Gonzalo Encinar Badía
Daniel Montero Lavado
Álvaro Rubio Segovia
2.
Presentación del proyecto
2.1.
Introducción:
bluetooth a través de un dispositivo externo (por ej. un smartphone). Nuestro
vehículo tiene dos ruedas giratorias en la parte delantera y paralelas al suelo
recubiertas por una fibra absorbente para facilitar la limpieza de polvo y
secado del suelo. Esto además de facilitar el movimiento en los 360º permite al
coche limpiar las zonas por las que pasa.

2.2.
Surgimiento de la idea
controlar desde un smartphone , sin embargo no queríamos hacer un coche al uso
si no que queríamos ir un paso más allá. De ahí la idea de hacer un coche mopa,
que limpiara el suelo por donde pasara el coche controlado remotamente pero
ayudar a personas con movilidad reducida a poder limpiar el suelos de sus
casas. Inicialmente el coche debía tener aparte de las propias mopas una bomba
de agua que cogiese esta de una botella y la echase al suelo para que actuase
además como fregona. Debido a problemas expuestos posteriormente no pudimos
completar la idea inicial.
3.
Materiales y componentes
requeridos
3.1.
Componentes electrónicos
prefabricados.
Material / Componente |
Cantidad |
Precio por unidad |
Imagen |
ELEGOO Arduino Mega 2560 |
Una unidades |
13,99€ |
 |
Hiletgo L293D Motor Driver Board Control Shield |
Una unidad |
7,66€ |
 |
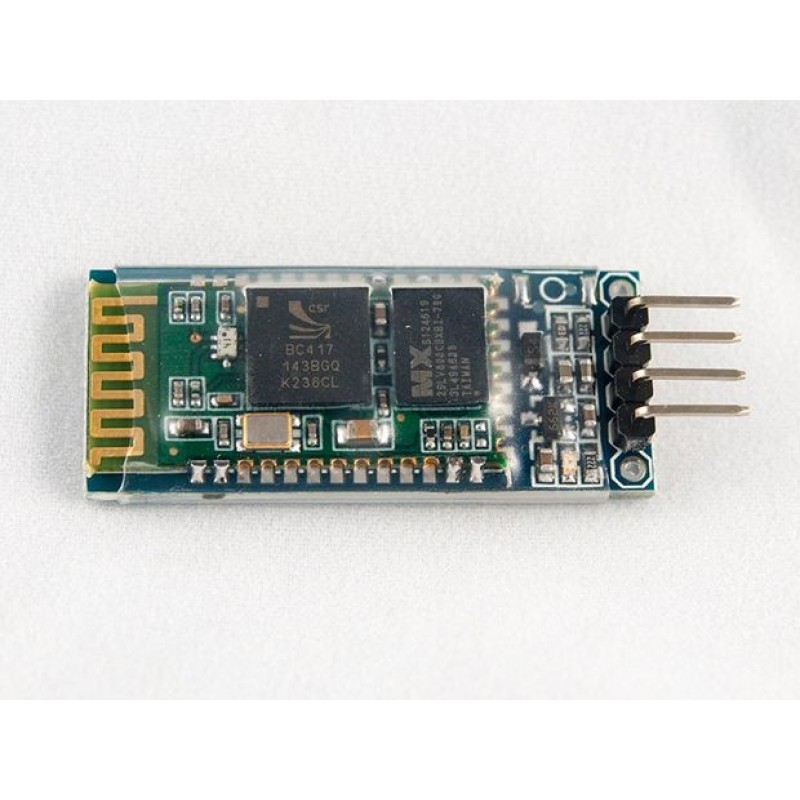
Neuftech Comunicación Serie Inalambrica | Bluetooth Serial HC-06 |
Dos unidades |
9,47€ |
 |
3.2.
Materiales y componentes restantes
Batería de 12V de ácido plomo |
Una unidad |
11,99€ |
 |
HeyNana Motores y HeyNana Ruedas |
Cuatro unidades de cada uno |
4,95€ |
 |
Rueda de soporte central |
Una unidades |
1€ |
|
Tabla de madera como base. |
Una unidad |
3€ |
|
Cableado para motores, bateria y dispositivo bluetooth y herramientas para la fijación de componentes |
x |
7 € |
4.
Desarrollo
nos reunimos en varias sesiones para debatir el diseño y realizar el montaje del
vehículo.
4.1.
Diseño
anchura y sobre la que se dispone la placa de arduino Mega, el motor shield y
el dispositivo HC-06 para el envío y recibo de datos a través de tecnología
bluetooth. El motor shield está conectado al arduino mega ocupando la mayor
parte de los pines digitales (Es por esta razón por la que se eligió esta
placa). El dispositivo de bluetooth está conectado al serial1 (pines TX1 y TD1)
de del arduino y a la alimentación de 5 voltios y ground de motor shield.
vehículo, pegados a las parte de abajo del soporte de madera y conectados a los
socket M1 y M2 del motor shield. Estos motores hacen girar dos discos
recubiertos por una tela absorbente para el polvo. Para estos discos hemos
utilizado dos CD’s antiguos cubiertos por una balleta de limpiar y pegados a
dos ruedas..
girar dos ruedas y controlar el movimiento del vehículo. Estos dos motores
están conectados a los sockets M3 y M4 de la motor shield.
bornes de la motor shield y situada en la parte trasera del vehículo para
minimizar el impacto de su peso en el movimiento del coche-mopa.
auxiliar en la base del vehículo.
4.2.
Montaje
1 – Para comenzar con el montaje
primero debemos cargar el código en la placa de arduino
2 – A continuación hemos de
conectar el arduino MEGA al motor shield y seguidamente conectar el dispositivo
HC-06 a la placa de arduino.
3 – Fijar los conectado a la base
de madera en la posición central del soporte.
4 – Encajar las ruedas a los
motores M3 y M4 y pegarlos al soporte de tal manera que queden a la misma
altura. Fijar la rueda auxiliar.
5 – Recortar una bayeta para que
pueda cubrir dos Cd’s y pegarlos a las ruedas encajadas en los motores M1 y M2.
Pegar estos dos motores en la parte delantera de tal forma que cubran la mayor
parte posible de anchura del vehículo.
6 – Conectar los motores a la
placa motor shield en los sockets correspondientes.
7 – Colocar la batería en la parte
posterior y fijarla.
8 – Conectar la batería a los
bornes al uso de la placa Motor Shield.
4.3.
Código utilizado
–> Motor shield
el coche
cochopa
las mopas delanteras
bluetooth
pinMode(19,INPUT_PULLUP);
Serial.begin(9600);
Serial1.begin(9600);
motor1.setSpeed(100);
motor2.setSpeed(100);
conexiones.
motor4.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
motor3.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
motor3.run(RELEASE);
motor4.run(RELEASE);
motor2.run(RELEASE);
motor1.run(RELEASE);
motor1.run(FORWARD);
motor2.run(FORWARD);
motor2.run(BACKWARD );
motor1.run(BACKWARD);
motor3.setSpeed(155);
motor4.setSpeed(155);
motor3.setSpeed(255);
motor4.setSpeed(255);
movimiento
(Serial1.available() > 0) {
hacia delante
pararMovimiento();
5.
Vídeo explicativo
Utilización de arduino MEGA.
motor driver board, el cual utiliza la mayoría de las salidas del arduino uno,
y para poder tener más funcionalidades necesitábamos algunas de estas salidas.
La solución que encontramos fue la utilización de un arduino mega que nos
permitía disponer de estas salidas
Cortocircuito
mientras montábamos el proyecto cometimos un error y provocamos un
cortocircuito, lo que provocó que algunas piezas como el arduino mega, el
módulo bluetooth o el motor driver board se quemaran y hubiera que
reemplazarlos.
Configuración módulo bluetooth
más tiempo nos llevó fue que no sabíamos que al utilizar arduino mega el puerto
serial que utilizabamos viene por defecto desconfigurado y hay que ponerle una
línea de configuración.
Bomba de agua
problema mayor y que no nos ha permitido terminar el proyecto como nos gustaría
ha sido un problema con la entrega por parte de amazon de la bomba de agua.
Inicialmente nos lo iban a entregar para antes de semana santa, nos lo
retrasaron para semana santa y posteriormente para después. Este último día (a
pocos días de entregar la práctica) no ha sido entregado y no nos ha dado
tiempo a comprar otra, teniendo el resto de materiales necesarios para la bomba
adquiridos.
7.
Resultado y funcionamiento.
necesita un dispositivo con una aplicación de bluetooth adecuada.
renombrado el dispositivo a cochemopa a través de comandos AT), y configurar la
aplicación para que mande al dispositivo:
“F”
→ Forward – Para hacer avanzar el coche.
“S”
→ Stop – Para detener el vehículo.
“P”
→ Parar – Para parar el vehículo y los discos limpiadores
“B”
→ Backwards – Para hacer retroceder el coche.
“R”
→ Right – Para hacer girar el vehículo a la derecha.
“L”
→ Left – Para hacer girar el vehículo a la izquierda.
“A”
→ Achicar – Para que los discos limpiadores giren con sentido exterior al
vehículo (disco derecho sentido horario y disco izquierdo sentido antihorario).
“D” → Desachicar –
Para que los discos delanteros giran en sentido contrario a achicar.
utilizar el coche-mopa.
8.
Futuras mejoras
- Las mejoras que nos gustaría llevar a cabo
sería terminar el proyecto como habíamos inicialmente planeado con el
sistema de agua. - Fuera de eso otra de las cosas que podríamos
implementar es un sistema de detección de objetos para que el cochompa sea
capaz de funcionar de manera totalmente autónoma. - Además para expandir aún más podríamos
incluir un temporizador que sea capaz de poner en funcionamiento a
Cochompa a ciertas horas del dia.
9. Conclusión
conclusión del proyecto es que hemos aprendido bastante de arduino en especial
del módulo bluetooth que nos provocó los problemas ya explicados y que nos
llevó a una búsqueda intensiva de información acerca del funcionamiento y
configuración de estos módulos.
ha ayudado además a mejorar nuestra capacidad de trabajo en grupo con un
proyecto bastante distinto al resto que hemos realizado durante nuestra etapa
universitaria. A pesar de los problemas que hemos tenido y de que finalmente no
lográsemos llevar a cabo la idea inicial del proyecto, estamos bastante satisfechos
con el resultado conseguido ya que hemos obtenido un proyecto manual que
funciona perfectamente.