Estabilizador con Arduino
ESTABILIZADOR CON ARDUINO
Realizado por:
Juan Jiménez Gálvez
Germán Matilla Jiménez
Ángel Cabanilles Gomar
Introducción
Ante la situación de indecisión que acontece al pensar en
qué proyecto realizar en la asignatura, todos hemos tenido nuestra pequeña
lluvia de ideas divertidas y alborotadoras:
qué proyecto realizar en la asignatura, todos hemos tenido nuestra pequeña
lluvia de ideas divertidas y alborotadoras:
– Un Arduino que te traiga una cervecita haya
donde estés (bien fresquita, por supuesto).
donde estés (bien fresquita, por supuesto).
– ¡Un Arduino que cree Arduinos y hacemos nuestro
propio ejército!
propio ejército!
– Un Arduino que sobrevuele la ciudad y que cada vez
que alguien estornude cuente si alguien ha respondido con un “Jesús”, con “Salud”
o con nada. Luego la información la vendemos y… no sé… ¡creamos nuestro propio
ejército!
que alguien estornude cuente si alguien ha respondido con un “Jesús”, con “Salud”
o con nada. Luego la información la vendemos y… no sé… ¡creamos nuestro propio
ejército!
Por suerte o por desgracia, este tipo de ideas no suelen
llegar a buen puerto y se quedan en el olvido. Ese es nuestro caso, ya que
finalmente dejamos de lado la idea de dominar el planeta y centrarnos en
realizar un estabilizador, es decir, una superficie que permaneciese paralela
al suelo a pesar del movimiento del resto del objeto.
llegar a buen puerto y se quedan en el olvido. Ese es nuestro caso, ya que
finalmente dejamos de lado la idea de dominar el planeta y centrarnos en
realizar un estabilizador, es decir, una superficie que permaneciese paralela
al suelo a pesar del movimiento del resto del objeto.
Materiales
Nombre |
Cantidad |
Precio (euros) |
Arduino UNO R3 |
1 |
– |
Petaca para pilas |
1 |
– |
Pilas |
6 |
|
Servomotores |
2 |
30 aprox. |
Breadboard |
1 |
– |
Cables |
12 |
– |
Acelerometro MMA8452Q |
1 |
10 |
Resistencias de 330 ohm |
2 |
– |
Madera |
1 m2 |
– |
Pistola de silicona |
1 |
16 |
Implementación y problemas
La visión conceptual no era complicada y los croquis de cómo
se podría estructurar el sistema iban surgiendo sin más. El único problema que
encontramos en esta etapa del diseño fue la de qué número de servomotores
utilizar pues no teníamos claro si utilizar 2 (eje X e Y), 4 (eje X e Y y diagonales)
o 6 (2 por cada vértice de un triángulo utilizado como base). Así pues, tras
quemar uno de nuestros preciados y amados servos, optamos por utilizar 2 debido
a la falta de presupuesto.
se podría estructurar el sistema iban surgiendo sin más. El único problema que
encontramos en esta etapa del diseño fue la de qué número de servomotores
utilizar pues no teníamos claro si utilizar 2 (eje X e Y), 4 (eje X e Y y diagonales)
o 6 (2 por cada vértice de un triángulo utilizado como base). Así pues, tras
quemar uno de nuestros preciados y amados servos, optamos por utilizar 2 debido
a la falta de presupuesto.
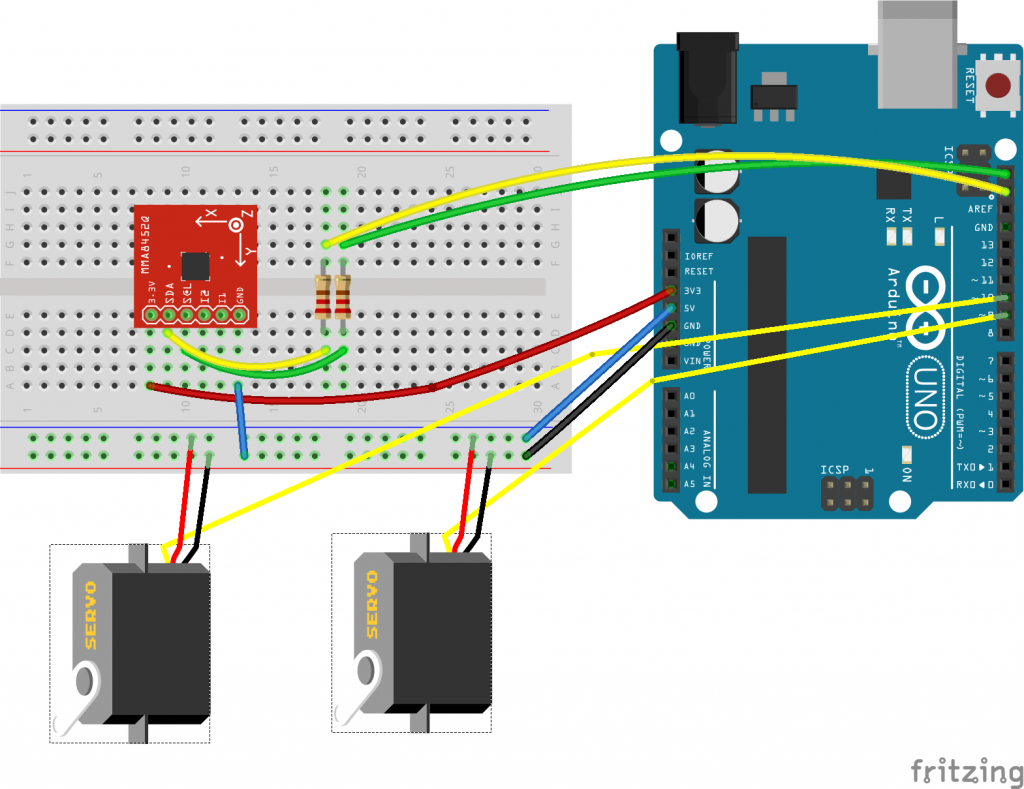
Una vez con este punto claro, compramos el acelerómetro, creamos
el esquema de conexiones del proyecto e iniciamos el montado.
el esquema de conexiones del proyecto e iniciamos el montado.
El último de los obstáculos hasta conseguir nuestro objetivo
era el software. Así pues, tras ver muchos tutoriales en internet en portugués,
ruso y griego, averiguamos cómo utilizar el acelerómetro MMA8452Q, el cual por algún
motivo nos estaba fallando (luego descubrimos que no habíamos soldado la pieza 😊).
era el software. Así pues, tras ver muchos tutoriales en internet en portugués,
ruso y griego, averiguamos cómo utilizar el acelerómetro MMA8452Q, el cual por algún
motivo nos estaba fallando (luego descubrimos que no habíamos soldado la pieza 😊).
Prosiguiendo con el desarrollo, tuvimos problemas con el
movimiento del estabilizador al reposicionarse (para estar paralelo al suelo),
pues el acelerómetro corregía el movimiento de la base, pero esa misma corrección
provocaba un movimiento que hacían que el acelerómetro tomase altas medidas que
instaban a que los servos volviesen a moverse en la otra dirección. Esto provocaba
un vaivén de los servos que hacían a nuestro proyecto bailar una danza la mar
de juguetona.
movimiento del estabilizador al reposicionarse (para estar paralelo al suelo),
pues el acelerómetro corregía el movimiento de la base, pero esa misma corrección
provocaba un movimiento que hacían que el acelerómetro tomase altas medidas que
instaban a que los servos volviesen a moverse en la otra dirección. Esto provocaba
un vaivén de los servos que hacían a nuestro proyecto bailar una danza la mar
de juguetona.
En cuanto al código, de los aspectos más importantes podemos
destacar que utilizamos las clásicas librerías Servo.h y Wire.h, además de la
buena librería de software libre SFE_MMA8452Q.h que nos sirvió para trabajar
con el acelerómetro.
destacar que utilizamos las clásicas librerías Servo.h y Wire.h, además de la
buena librería de software libre SFE_MMA8452Q.h que nos sirvió para trabajar
con el acelerómetro.

Por otro lado, ante el problema de “la danza” del proyecto
comentada anteriormente, creamos un código que interpolaba los resultados obtenidos
en las medidas del acelerómetro para posteriormente, con una constante de
tolerancia, calcular el número de grados que el servo debería girar.
comentada anteriormente, creamos un código que interpolaba los resultados obtenidos
en las medidas del acelerómetro para posteriormente, con una constante de
tolerancia, calcular el número de grados que el servo debería girar.

Conclusión
Finalmente nos quedó un proyecto interesante que respondía
en un tiempo más que adecuado. Por desgracia para nosotros, tras obtener el
resultado que deseamos se nos quemó el acelerómetro por intentar optimizar un
par de recursos y Amazon nos decepcionó con una entrega muy tardía. Aún así, gracias
al dios tecnología, habíamos grabado un vídeo que, aunque no es para nada la de
la versión final del proyecto (pues como podréis observar el tiempo de
respuesta es cuestionable), muestra claramente lo que buscábamos con el
proyecto.
en un tiempo más que adecuado. Por desgracia para nosotros, tras obtener el
resultado que deseamos se nos quemó el acelerómetro por intentar optimizar un
par de recursos y Amazon nos decepcionó con una entrega muy tardía. Aún así, gracias
al dios tecnología, habíamos grabado un vídeo que, aunque no es para nada la de
la versión final del proyecto (pues como podréis observar el tiempo de
respuesta es cuestionable), muestra claramente lo que buscábamos con el
proyecto.

