EXOESQUELETO V 0,5
Grupo 22- Campus de Móstoles
Jose Vicente Bañuls
Guillermo Manuel Nogales
EXOESQUELETO V 0,5
Este exoesqueleto nació como un intento de prótesis para ayudar a las personas con movilidad reducida, actualmente se trata de un sistema de ayuda a la rehabilitación, siendo capaz mediante un sistema neumático, usando un compresor de aire, de ayudar a la persona a estirar la pierna y mantenerla recta.
Índice:
·
Costes
Costes
·
Estructura
Estructura
·
Sistema Neumático
Sistema Neumático
·
Circuito
Circuito
·
Sensor
Sensor
·
Programa
Programa
·
Mejoras
Mejoras
·
Videos
Videos
Costes
Materiales |
Numero de Unidades |
Precio |
Arduino |
1 |
– |
Sensor myware |
1 |
39 |
Válvulas solenoides |
2 |
9 |
Malla para cables (15m) |
1 |
15,2 |
Tubo de látex (3m) |
1 |
11 |
Tubo Neumático (4m) |
1 |
7,75 |
Conectores Neumáticos (5 piezas |
1 |
2,3 |
Relés |
3 |
10 |
conector compresor |
1 |
3 |
tubos rectangulares aluminio |
2 |
5 |
Laminas de aluminio |
2 |
8 |
Cable de Acero |
1 |
7 |
cinta elástica |
1 |
5 |
abrazaderas |
1 |
4 |
anillos en D |
1 |
1,5 |
Varios |
– |
5 |
velcro |
1 |
3 |
TOTAL |
135,75 |
Estructura
Para la estructura, nos hemos basado en aparatos ortopédicos para piernas.

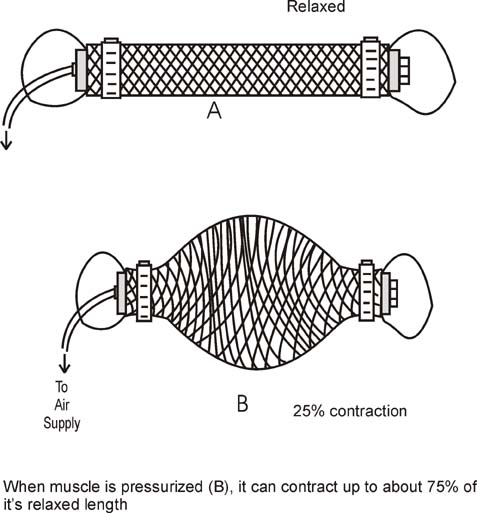
Sistema Neumático
Nuestro sistema neumático utiliza la capacidad elástica del
tubo de látex y la resistencia de la malla. Cuando el tubo se hincha la malla
que lo recubre se contrae, ejerciendo la fuerza que usamos para mantener la
estructura recta.
tubo de látex y la resistencia de la malla. Cuando el tubo se hincha la malla
que lo recubre se contrae, ejerciendo la fuerza que usamos para mantener la
estructura recta.

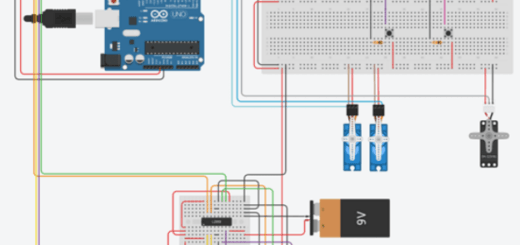
Circuito

El sensor, imagen arriba, se encuentra conectado
a 5v, tierra y A0, es un sensor analógico, el relé que alimenta la válvula
solenoide, para abrir y cerrar el circuito de aire, esta conectado al pin 6.
Cuando el arduino recibe una señal del sensor
que llega o supera el umbral activa el relé.
Sensor
En cuanto al funcionamiento del sensor, lo posicionamos en la mitad del vasto externo o lateral del cuádriceps. No elegimos otro vasto, pese a realizar la misma función, dado que este es mas superficial, influye menos en la estructura y nos daba mejor señal. El sensor nos convierte la señal que recibe, que a final de cuentas no deja de ser un osciloscopio, a un varemo, un rango entre 0V y el voltaje al que alimentemos el sensor, en nuestro caso, 5V. Eso se traduce a una señal analógica entre 0 y 1024 una vez el arduino lo recibe en el puerto A0. Con ese valor, jugamos hasta encontrar un umbral adecuado para nuestro propósito. En nuestro caso, dada la posición y el sujeto de pruebas, el umbral adecuado es de 450. una vez superado, activamos el puente del relee, lo que abre el circuito de la válvula solenoide, cortando la corriente y volviendo a su estado inicial, es decir, cerrada. Eso implica que el flujo de aire que escapa del sistema se ve reducido, lo que se traduce en un aumento de presión dentro de los músculos neumáticos, realizando la contracción.
Programa
a 5v, tierra y A0, es un sensor analógico, el relé que alimenta la válvula
solenoide, para abrir y cerrar el circuito de aire, esta conectado al pin 6.
que llega o supera el umbral activa el relé.
int value;
void setup() {
void setup() {
Serial.begin(9600);
pinMode(7, OUTPUT);
pinMode(2,INPUT);
}
void loop() {
value = digitalRead(2);
int sensorValue = analogRead(A0);
if((sensorValue >= 450)||(value == 1)){
digitalWrite(7,HIGH);
}else{
digitalWrite(7,LOW);
}
Serial.println(sensorValue);
//Serial.println(value);
delay(20);
}
Mejoras
Las mejoras que querríamos implementar son:
•Sistema neumático portátil
•Sistema hidráulico
•Movimiento de cadera
•Ayuda tanto en relajación como contracción
•Forma menos aparatosa de colocación
•Hacer un diseño regulable
•Sistema neumático portátil
•Sistema hidráulico
•Movimiento de cadera
•Ayuda tanto en relajación como contracción
•Forma menos aparatosa de colocación
•Hacer un diseño regulable