Grupo 11 – Robot detector y seguimiento con reproductor de sonido
Robot detector y seguimiento con reproductor de sonido

Componentes del grupo:
Amanda Herrero González
Héktor Jacynycz García
Grupo 11
2016/2017
Introducción
Después de buscar diferentes proyectos en Arduino por internet, nos llamó la atención juntar sensores y motores en un mismo proyecto. En estos proyectos, los sensores se encargan de recoger cierta información que hace mover los motores según unas condiciones.
La idea principal del proyecto es diseñar un robot que tiene sensores de movimiento y de ultrasonidos que giran sobre un servomotor y es capaz de detectar el movimiento y seguir a una persona.
El proyecto, además, está inspirado en unas torretas del videojuego llamado Portal, que tienen un comportamiento similar y reproducen una serie de sonidos como si fueran una IA así que hemos añadido sonidos al robot.
Fases del funcionamiento
- 1ª fase: se activa el sensor PIR y esperamos a detectar movimiento.
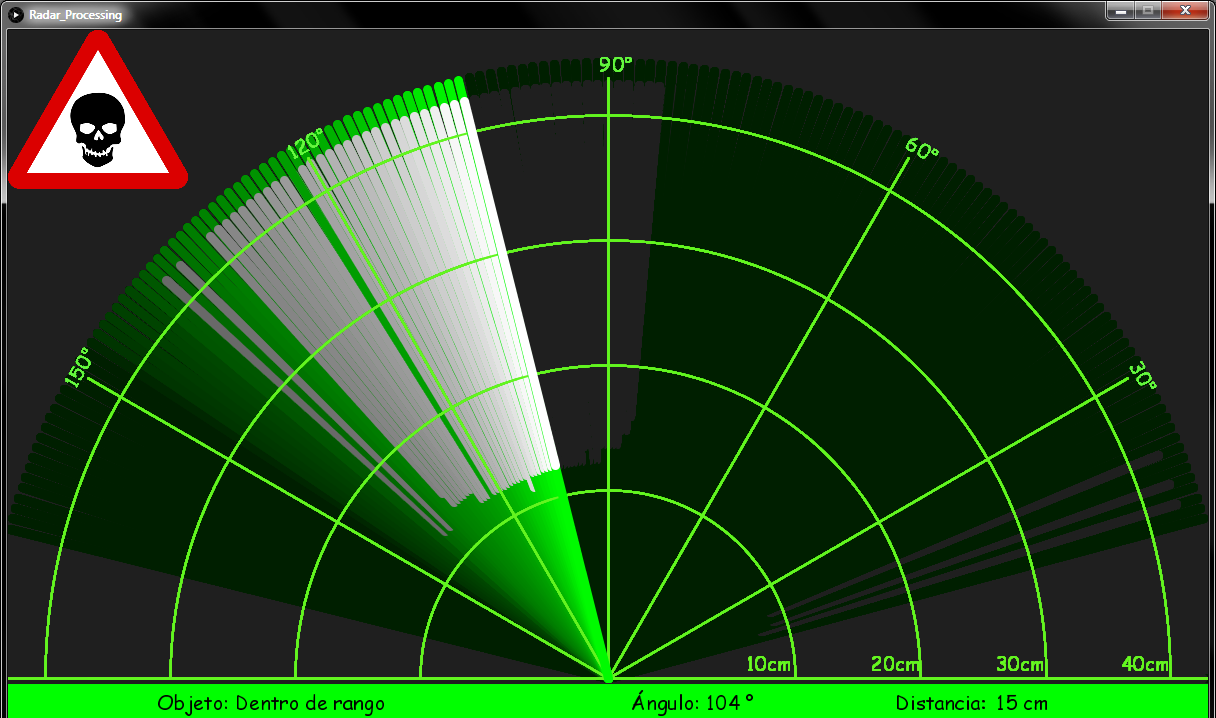
- 2ª fase: se activan los sensores de ultrasonido y el motor hace un barrido completo de 180º tomando mediciones en cada giro y se detiene cuando encuentra un objeto en su radio de actuación.
- 3ª fase: los sensores siguen realizando mediciones y girando el motor según cuál de los dos sensores detecta el sonido. Si no detectan nada el motor sigue girando buscando un objeto.
- 4ª fase: tras una serie de mediciones fallidas, el robot pasará a un estado de suspensión volviendo de nuevo a la 1ª fase.
Materiales
Componente |
Precio |
Módulo Arduino Uno |
0,00 € |
Protoboard |
0,00 € |
Altavoz con minijack |
0,00 € |
10 cables M/M |
3,00 € |
10 cables H/H |
2,90 € |
Arduino Wave Shield v2.1 |
15,00 € |
2 x Sensor de Proximidad Ultrasonido HC-SR04 |
8,50 € |
Sensor PIR |
13,00 € |
Servomotor miniatura HD-11 60A |
10,75 € |
Madera |
7,60 € |
Soportes PIR |
7,00 € |
Total |
67,75€ |
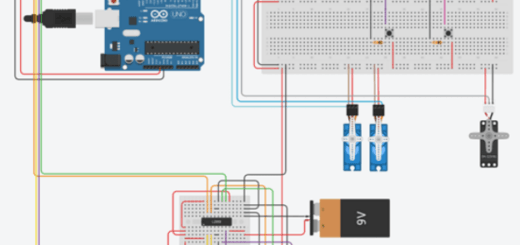
Esquema

Problemas y soluciones
ü
Los sensores de ultrasonidos han sido muy
problemáticos durante todo el desarrollo del proyecto, ya que son nuestra única
fuente de información para tomar decisiones. Estos sensores al ser baratos y al
estar constantemente en movimiento, las mediciones que nos dan no son muy
precisas, lo que nos ha hecho modificar nuestro código multitud de veces.
Los sensores de ultrasonidos han sido muy
problemáticos durante todo el desarrollo del proyecto, ya que son nuestra única
fuente de información para tomar decisiones. Estos sensores al ser baratos y al
estar constantemente en movimiento, las mediciones que nos dan no son muy
precisas, lo que nos ha hecho modificar nuestro código multitud de veces.
ü El
módulo de Arduino Wave Shield v2.1 tiene muy poca documentación en internet y
la manera en la que reproduce archivos es muy limitada y con muchas
restricciones. Los audios se tienen que convertir a un formato especial con
unas determinadas características que decrementan de la calidad original de la
grabación.
módulo de Arduino Wave Shield v2.1 tiene muy poca documentación en internet y
la manera en la que reproduce archivos es muy limitada y con muchas
restricciones. Los audios se tienen que convertir a un formato especial con
unas determinadas características que decrementan de la calidad original de la
grabación.
Al no conocer los pines que utiliza
este módulo, los demás componente utilizaban los pines reservados para este
módulo y dejaban de funcionar correctamente. Para solventarlo hemos probado diferentes
combinaciones de pines hasta conseguir solucionar estos problemas.
este módulo, los demás componente utilizaban los pines reservados para este
módulo y dejaban de funcionar correctamente. Para solventarlo hemos probado diferentes
combinaciones de pines hasta conseguir solucionar estos problemas.
Otro de los problemas derivados de este
módulo hace que el motor haga movimientos aleatoriamente cuando se reproduce un
sonido, y lo hemos solventado llevando el motor a un pin analógico.
módulo hace que el motor haga movimientos aleatoriamente cuando se reproduce un
sonido, y lo hemos solventado llevando el motor a un pin analógico.