Grupo 2 Parking Autónomo

Mario Conejos Basanta
Maria Cristina
Gil Ortiz
Gil Ortiz
Eva Moreno Pasarín
UNIVERSIDAD REY JUAN CARLOS
GII+ADE VICÁLVARO
1. INTRODUCCIÓN
1.1. Objetivos
Para este proyecto decidimos realizar un
parking exterior utilizando dos placas Arduino UNO para poder igualar y aumentar las funcionalidades de
proyectos anteriores similares. El parking simula un aparcamiento real
con barreras de entrada y de salida que controlan la ocupación del parking así
como el control de acceso a más o menos conductores. Además este proyecto
permite la detección de plazas ocupadas, acción que más adelante se
especificará en la memoria. También hay disponibilidad de aparcamiento para
minusválidos y vehículos biplaza, para los cuales también hemos diseñado un
mecanismo de control de acceso y registro para entrar y salir del parking.
parking exterior utilizando dos placas Arduino UNO para poder igualar y aumentar las funcionalidades de
proyectos anteriores similares. El parking simula un aparcamiento real
con barreras de entrada y de salida que controlan la ocupación del parking así
como el control de acceso a más o menos conductores. Además este proyecto
permite la detección de plazas ocupadas, acción que más adelante se
especificará en la memoria. También hay disponibilidad de aparcamiento para
minusválidos y vehículos biplaza, para los cuales también hemos diseñado un
mecanismo de control de acceso y registro para entrar y salir del parking.
1.2. Funcionamiento
del parking
del parking
Al ser un proyecto muy parecido a un
parking real, su funcionamiento es bastante simple e intuitivo. Cuando un
vehículo (coche regular) quiere acceder al aparcamiento debe presionar el
pulsador que se encontrará en la barrera de entrada. En este punto pueden
suceder dos cosas:
parking real, su funcionamiento es bastante simple e intuitivo. Cuando un
vehículo (coche regular) quiere acceder al aparcamiento debe presionar el
pulsador que se encontrará en la barrera de entrada. En este punto pueden
suceder dos cosas:
·
La barrera se abre y se actualiza el número de plazas libres dentro del parking que en un
principio serán 8 para simplificar la maqueta. Además se generará un mensaje de
BIENVENIDA que aparecerá en una pantalla en la misma entrada. Se disminuye una
plaza en el total de libres del aparcamiento.
La barrera se abre y se actualiza el número de plazas libres dentro del parking que en un
principio serán 8 para simplificar la maqueta. Además se generará un mensaje de
BIENVENIDA que aparecerá en una pantalla en la misma entrada. Se disminuye una
plaza en el total de libres del aparcamiento.
·
El parking se encuentra completo, mensaje que previamente había aparecido en una pantalla situada en la
entrada del aparcamiento.
El parking se encuentra completo, mensaje que previamente había aparecido en una pantalla situada en la
entrada del aparcamiento.
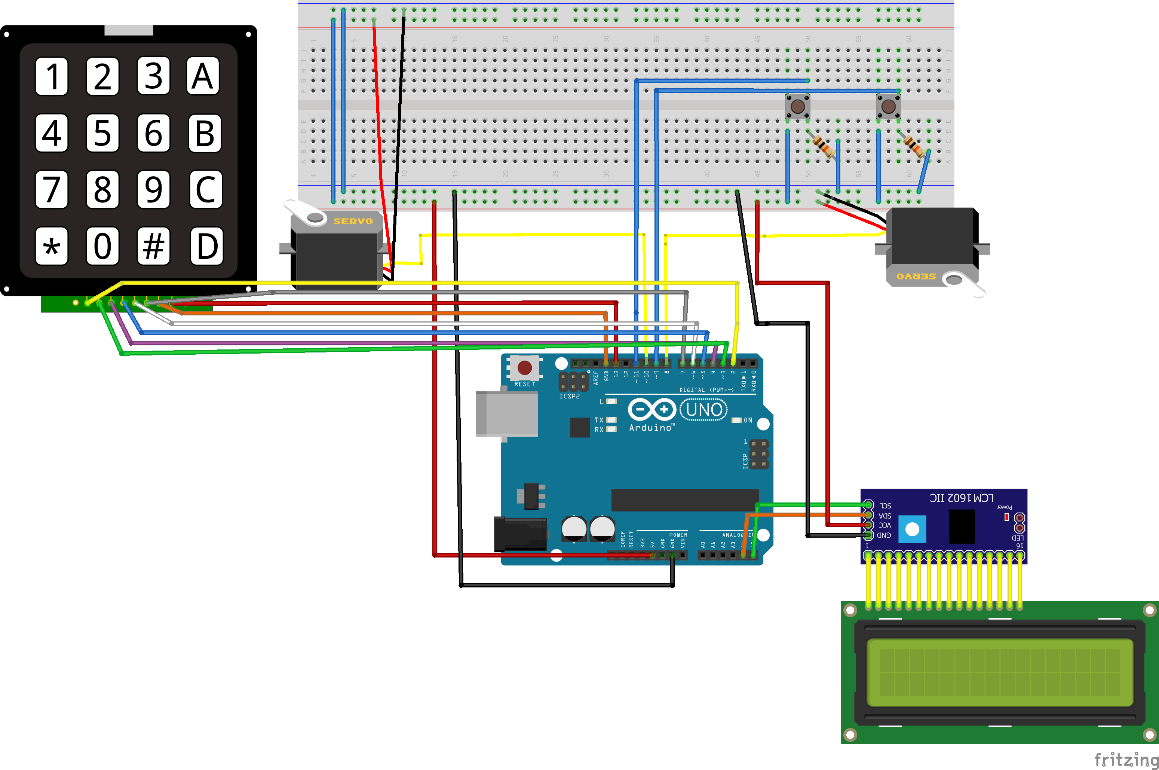
Por otra parte, la entrada de motos y similares y de vehículos de
minusválidos se realiza con una pequeña particularidad. En caso de pertenecer a
uno de estos colectivos y con el fin de ofrecerles aparcamiento gratuito,
deberán seleccionar un botón especial diferente al pulsador desde un teclado
que hemos incorporado. Esto hará que se les asigne un código que deberán
introducir en la salida para que la barrera de salida se accione. También se
controlara el número de vehículos de este tipo que acceden al parking.
minusválidos se realiza con una pequeña particularidad. En caso de pertenecer a
uno de estos colectivos y con el fin de ofrecerles aparcamiento gratuito,
deberán seleccionar un botón especial diferente al pulsador desde un teclado
que hemos incorporado. Esto hará que se les asigne un código que deberán
introducir en la salida para que la barrera de salida se accione. También se
controlara el número de vehículos de este tipo que acceden al parking.
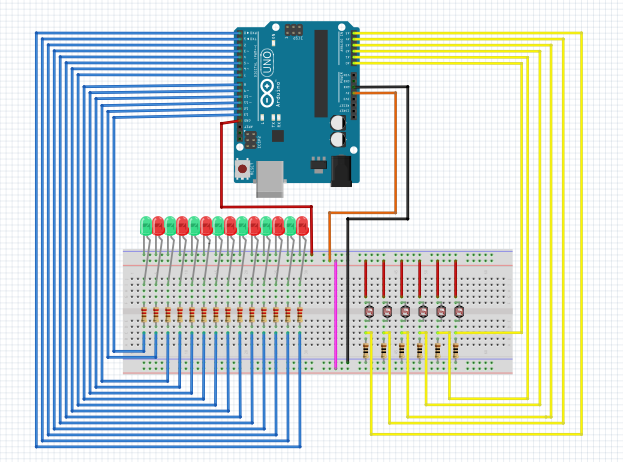
Una vez dentro, para ofrecer valor añadido a nuestro parking y facilitar la
búsqueda de una plaza libre a los conductores (excluimos aquí a minusválidos y
motocicletas), hemos incorporado sensores de luz que activen o no LEDS verdes o
rojos en caso de que una plaza esté libre u ocupada respectivamente. Para una
intensidad lumínica las luces verdes asociadas a cada plaza aparecerán verdes
(libre), y en caso de que esta intensidad baje, esta se apaga y se enciende otra
roja (ocupada).
búsqueda de una plaza libre a los conductores (excluimos aquí a minusválidos y
motocicletas), hemos incorporado sensores de luz que activen o no LEDS verdes o
rojos en caso de que una plaza esté libre u ocupada respectivamente. Para una
intensidad lumínica las luces verdes asociadas a cada plaza aparecerán verdes
(libre), y en caso de que esta intensidad baje, esta se apaga y se enciende otra
roja (ocupada).
1.3. Funcionalidades
añadidas
añadidas
·
Conocimiento del número de plazas libres desde la apertura del parking de
las plazas regulares.
Conocimiento del número de plazas libres desde la apertura del parking de
las plazas regulares.
·
Mensajes por pantalla para
interacción conductor-parking.
Mensajes por pantalla para
interacción conductor-parking.
·
Asignación plaza más cercana a la salida de peatones
al recinto comercial.
Asignación plaza más cercana a la salida de peatones
al recinto comercial.
·
Asignación de código de minusválido/ motocicleta por teclado en la entrada para salida
gratuita
Asignación de código de minusválido/ motocicleta por teclado en la entrada para salida
gratuita
·
Sensor lumínico para aviso de plaza libre//ocupada.
Sensor lumínico para aviso de plaza libre//ocupada.
·
Sistema de detección de plazas especiales a la salida del parking introducidas
por teclado
Sistema de detección de plazas especiales a la salida del parking introducidas
por teclado
·
Actualización de plazas libres en la salida.
Actualización de plazas libres en la salida.