Grupo 21: Yan ken po (Mostoles)
Autores: Johnny Cancio
Sandoval
Sandoval
Qiao Lang Chen
Introducción:
Nuestro proyecto se trata de dos
manos robóticas que juega al piedra-papel-tijera en el que el primero se
controla a través de una aplicación del móvil mediante bluetooth, y el segundo
mediante un guante con sensores de flexibilidad.
manos robóticas que juega al piedra-papel-tijera en el que el primero se
controla a través de una aplicación del móvil mediante bluetooth, y el segundo
mediante un guante con sensores de flexibilidad.
Esquema hardware-software:
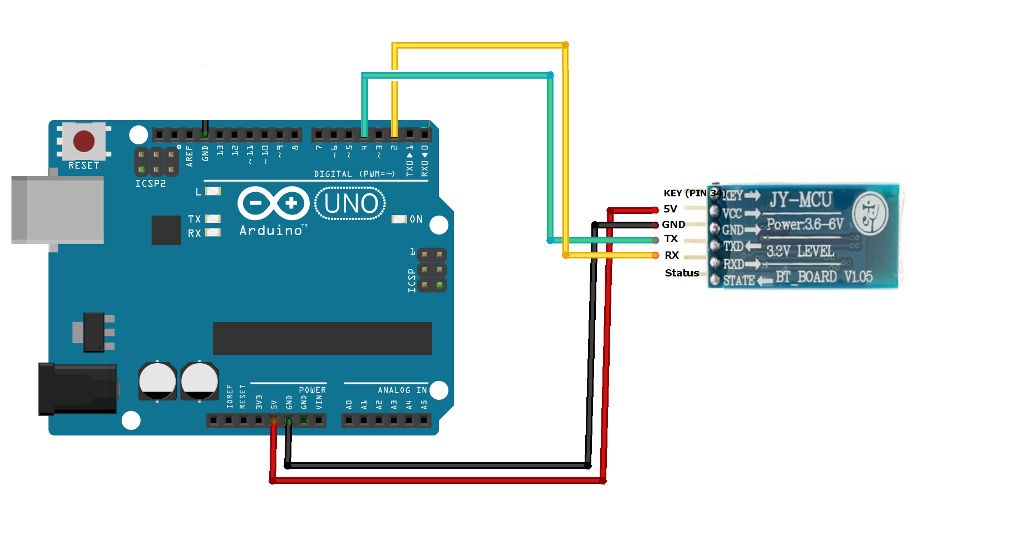
Conexión tipo para un módulo bluetooth HC-06.
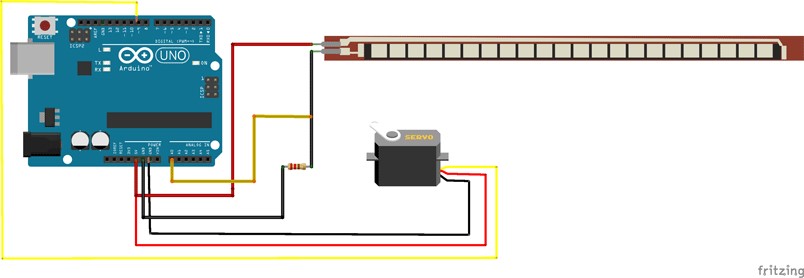
Conexión de un servomotor a una
placa arduino.
placa arduino.

Conexión de un sensor de flexibilidad
que envía una señal al servomotor.
que envía una señal al servomotor.
Componentes y precios:
Componentes usados de la caja:
Componente |
Cantidad |
Arduino uno |
1 |
Resistencias |
2 |
Servomotor |
1 |
Cables |
20 durante el prototipo |
Componentes comprados:
Componente |
Cantidad |
Precio/Unidad |
Total |
Arduino uno |
1 |
23€ |
23€ |
Servomotores |
4 |
8,90€ |
35.60€ |
Placa de madera |
1 |
2€ |
2€ |
Guante de goma |
1 |
0,80€ |
0,80€ |
Módulo bluetooth |
1 |
2,10€ |
2,10€ |
Sensores flex. |
2 |
Casero |
0€ |
Cables |
4 metros |
Reutilizados |
0€ |
Kit Pan-tilt |
1 |
Casero |
0€ |
Protoboard |
2 |
Reutilizadas |
0€ |
Pilas |
4 |
Reutilizadas |
0€ |
Pack tubo plástico |
1 |
De casa |
0€ |
Cinta aislante |
1 |
De casa |
0€ |
Pegamento |
1 |
De casa |
0€ |
Pistola de silicona |
1 |
De casa |
0€ |
Total |
63,50€ |
Montaje:
Para ambas manos:
Los pines de alimentación usado son
los siguientes:
los siguientes:
VIN:
con este pin suministramos tensión a la placa con una fuente externa.
con este pin suministramos tensión a la placa con una fuente externa.
5V:
este pin genera una tención de 5V regulado por el regulador de la placa, puede
ser alimentada por la entrada de alimentación (7-12 V), el conector USB (5V), o
el pin VIN (7-12 V). El suministro de tensión a través de los pines de 5V o 3,3V
no pasan por el regulador por lo que no se recomienda alimentar la placa a
través de esos pines ya que puede dañar la placa.
este pin genera una tención de 5V regulado por el regulador de la placa, puede
ser alimentada por la entrada de alimentación (7-12 V), el conector USB (5V), o
el pin VIN (7-12 V). El suministro de tensión a través de los pines de 5V o 3,3V
no pasan por el regulador por lo que no se recomienda alimentar la placa a
través de esos pines ya que puede dañar la placa.
GND:
negativo.
negativo.
Primero empezamos con un prototipo para
ambas manos.
ambas manos.
En la primera imagen se observa una
mano con solo 4 dedos, mano controlada por sensor de flexibilidad.
mano con solo 4 dedos, mano controlada por sensor de flexibilidad.
En la segunda imagen se observa el
arduino con las conexiones de la mano controlada por bluetooth.
arduino con las conexiones de la mano controlada por bluetooth.

Para la mano controlada por Bluetooth
mediante el uso de una aplicación usaremos los pines con funciones especializadas
tipo serie: 0(RX) y 1(TX) se utilizan para recibir (RX) y transmitir (TX) datos
serie TTL. Posteriormente estas entradas fueron cambiadas por la entra del pin 4(RX)
y 2(TX).
mediante el uso de una aplicación usaremos los pines con funciones especializadas
tipo serie: 0(RX) y 1(TX) se utilizan para recibir (RX) y transmitir (TX) datos
serie TTL. Posteriormente estas entradas fueron cambiadas por la entra del pin 4(RX)
y 2(TX).
Se crea otra mano modelando la tabla
de madera para darle una forma más parecida a un brazo. A la par se pega en una
madera un servomotor para conseguir agitar la mano.
de madera para darle una forma más parecida a un brazo. A la par se pega en una
madera un servomotor para conseguir agitar la mano.


Se mejora las conexiones acortando
los cables y ajustándolos para dar como resultado final las imágenes mostradas
a continuación.


los cables y ajustándolos para dar como resultado final las imágenes mostradas
a continuación.
Para poder controlar esta mano se
crea la aplicación para Android con el App Inventor.
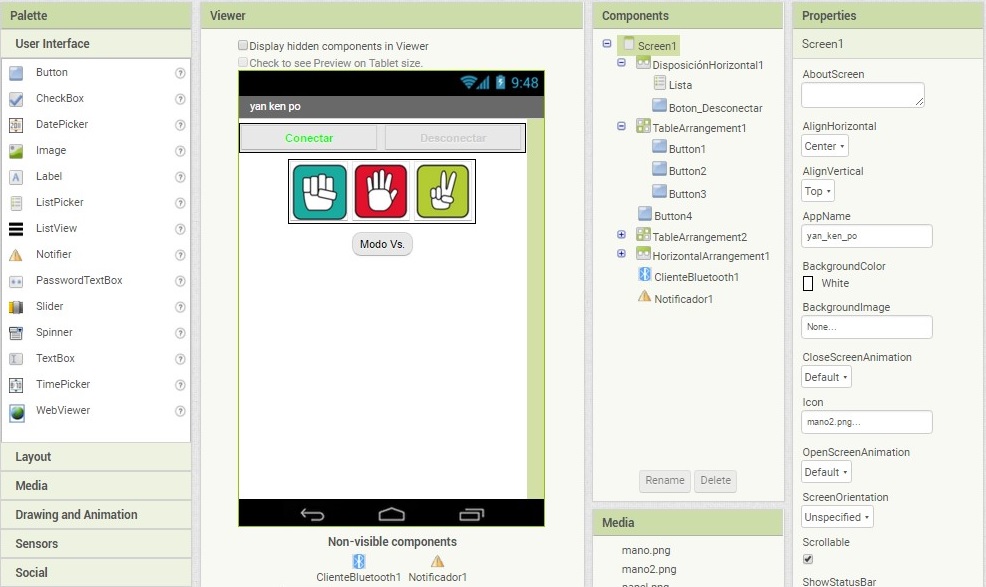
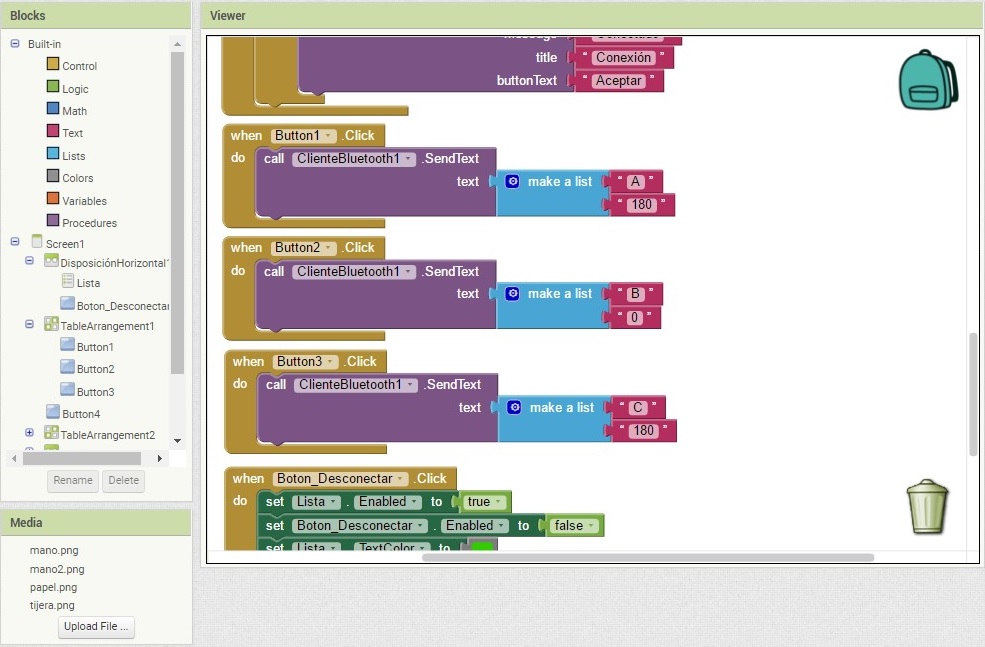
crea la aplicación para Android con el App Inventor.
Como se observa al presionar un botón
envía una señal al módulo bluetooth, en el código creado para arduino esta
señal es leída, mandando a realizar una acción.
envía una señal al módulo bluetooth, en el código creado para arduino esta
señal es leída, mandando a realizar una acción.
Para la mano controlada por un
guante que tiene sensores de flexibilidad caseros. Se utilizaron los pines analógicos
(A0, A1) que reciben los datos enviados por el sensor de flexibilidad que actúa
como un divisor de tensión al ser flexionado y los seriales (8, 9) para que el
servomotor se mueva al recibir los datos de los pines analógicos.


guante que tiene sensores de flexibilidad caseros. Se utilizaron los pines analógicos
(A0, A1) que reciben los datos enviados por el sensor de flexibilidad que actúa
como un divisor de tensión al ser flexionado y los seriales (8, 9) para que el
servomotor se mueva al recibir los datos de los pines analógicos.
Problemas y soluciones:
Problemas |
Soluciones |
El coste de los servomotores. |
Después de darle muchas vueltas nos dimos cuenta de que no era necesario tantos servomotores, con dos era suficiente. |
Se ha estropeado el portátil de Qiao Lang. |
Pedir prestado el portátil de un compañero para trabajar en clase. |
Error en los sensores caseros. |
Cambiar el contacto de los pines por un material más conductor y mejorar la resistencia del papel con un plástico. |
Los “dedos” se soltaron de la cinta. |
Reforzar los dedos con una pistola de silicona caliente. |
Dificultad de programar la aplicación. |
Cambiar al App Inventor que es más intuitivo y fácil de trabajar. |
Rotura de la madera. |
Parchar la madera con otros trozos de madera sobrantes. |
Trabajo de cada miembro del grupo:
Todas las tareas realizadas en el
proyecto se han llevado a cabo en conjunto. Dichas tareas son:
proyecto se han llevado a cabo en conjunto. Dichas tareas son:
Hacer la memoria
Hacer la presentación
Hacer fotos
Grabar videos
Montar las manos
Montar el guante
Construir el circuito de las
manos
manos
Diseñar código arduino
Diseñar código para la aplicación
bluetooth
bluetooth
Pelar los cables
Hacer los “dedos”
Llevar el proyecto
Comprar materiales
Posibles mejoras:
Para la mano controlada por bluetooth
se podría añadir otro servomotor para conseguir un movimiento lateral que imitase
mejor el movimiento del codo. Con esto podríamos por ejemplo usar la mano para
sujetar una botella y verter su contenido en un vaso.
se podría añadir otro servomotor para conseguir un movimiento lateral que imitase
mejor el movimiento del codo. Con esto podríamos por ejemplo usar la mano para
sujetar una botella y verter su contenido en un vaso.
Para la mano controlada por el
guante se podría añadir un sensor de flexibilidad para cada dedo con su servomotor
correspondiente de esta manera cada dedo seria independiente (esta era la idea
inicial, pero el coste era mucho). El código proporcionado por nosotros esta
creado para cada dedo con su función independiente.
guante se podría añadir un sensor de flexibilidad para cada dedo con su servomotor
correspondiente de esta manera cada dedo seria independiente (esta era la idea
inicial, pero el coste era mucho). El código proporcionado por nosotros esta
creado para cada dedo con su función independiente.
También se puede añadir a este último
un Kit Pan-tilt que reciba la señal de un acelerómetro. De esta manera se podría
recrear al cien por ciento el movimiento de un brazo humano.
un Kit Pan-tilt que reciba la señal de un acelerómetro. De esta manera se podría
recrear al cien por ciento el movimiento de un brazo humano.
Conclusión:
Este proyecto nos pareció muy
interesante porque además de aprender arduino, este nos ha llevado a conocer
otras disciplinas como programar para Android aunque nos ha costado más de lo
que creíamos.
interesante porque además de aprender arduino, este nos ha llevado a conocer
otras disciplinas como programar para Android aunque nos ha costado más de lo
que creíamos.
Apéndice:
Código fuente mano Bluetooth:
Código fuente mano guante:
Aplicación APK:
PDF:
Material audiovisual:


