Grupo 24: Parking con ascensor
Proyecto
final: Parking con ascensor

Grupo nº24
Alejandro Guzmán López (GII + MATEMÁTICAS)
Francisco Pérez Díaz (GII + MATEMÁTICAS)
María Teresa Solano Albares (GII + MATEMÁTICAS)
1. INTRODUCCIÓN
1.1.
Objetivos
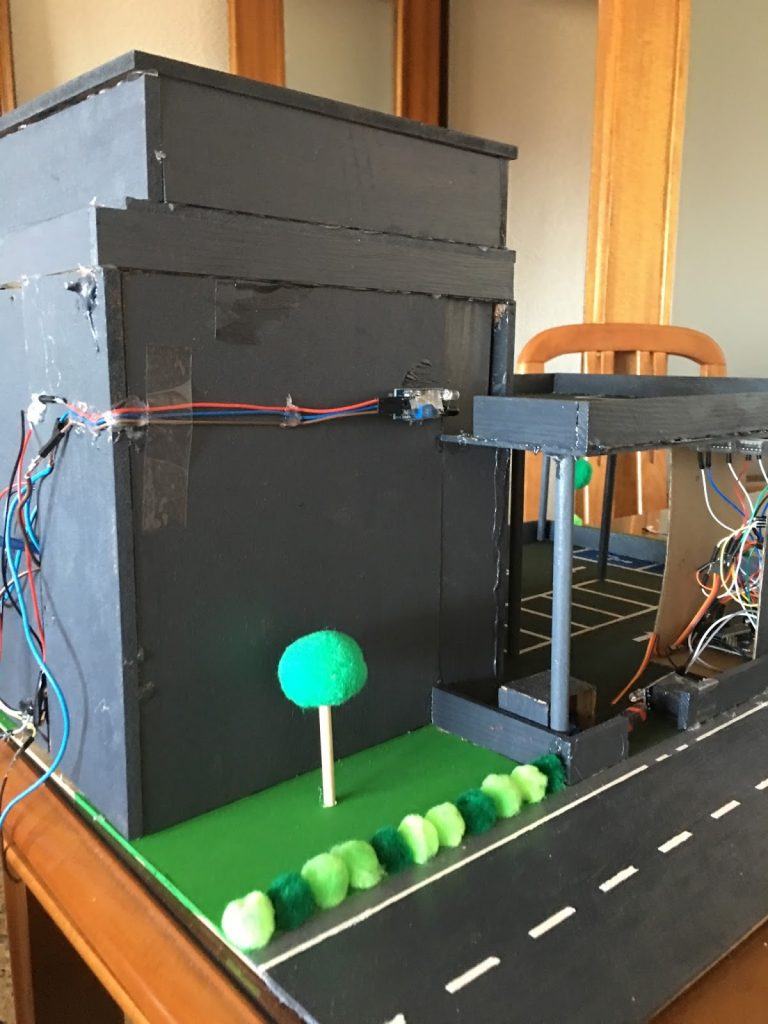
Elegimos este proyecto con el objetivo de crear un
parking exterior de dos plantas integrando un ascensor para acceder a la
segunda planta, utilizando dos placas Arduino
UNO. Se dispondrá de una barrera de entrada y una barrera de salida en la
parte baja del parking, de las cuales explicaremos su funcionamiento de manera
más explícita posteriormente. Además, se utilizará un display para informar cuando el parking se encuentre con menos de
10 plazas libres. El ascensor se iniciará en la planta baja y al utilizarse, a
no ser que haya otro coche que lo quiera utilizar, se quedará en la planta de
arriba.
parking exterior de dos plantas integrando un ascensor para acceder a la
segunda planta, utilizando dos placas Arduino
UNO. Se dispondrá de una barrera de entrada y una barrera de salida en la
parte baja del parking, de las cuales explicaremos su funcionamiento de manera
más explícita posteriormente. Además, se utilizará un display para informar cuando el parking se encuentre con menos de
10 plazas libres. El ascensor se iniciará en la planta baja y al utilizarse, a
no ser que haya otro coche que lo quiera utilizar, se quedará en la planta de
arriba.
1.2.
Funcionamiento
La explicación del funcionamiento de este proyecto es
bastante intuitiva y simple.
bastante intuitiva y simple.
Tenemos una planta baja a la que se accederá a través
de una barrera que presenta un sensor infrarrojo que se activará en cuanto haya
un coche esperando.
de una barrera que presenta un sensor infrarrojo que se activará en cuanto haya
un coche esperando.
La salida del parking funciona de manera similar a la entrada, detectando cuando un coche quiere salir a través de un sensor infrarrojo y abriendo la barrera para dejar salir al vehículo.
Cabe destacar que el parking no abrirá la barrera de entrada si no quedan plazas libres, al igual que no abrirá la barrera de salida si no hay ningún vehículo en el interior.
Para saber si hay plazas libres en el parking y si la
barrera tiene que abrirse, llevaremos un contador de los coches que entran y
los coches que salen.
barrera tiene que abrirse, llevaremos un contador de los coches que entran y
los coches que salen.
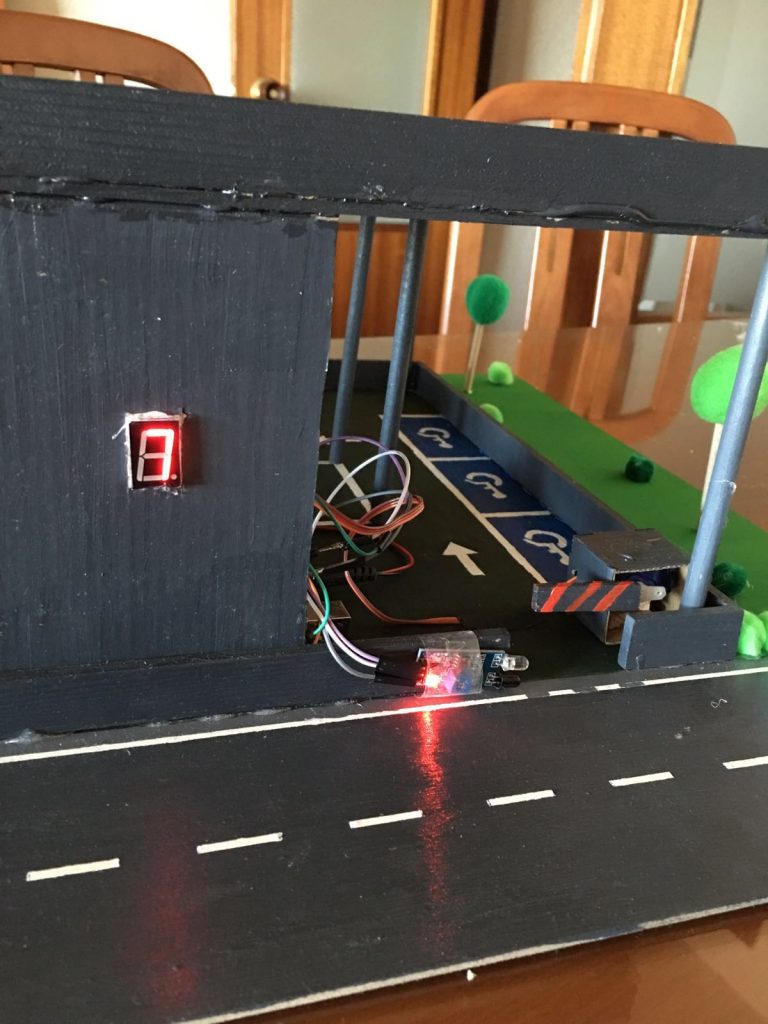
Tendremos un total de 25 plazas, y, como hemos dicho en
los objetivos, habrá un display
incorporado en la entrada del parking que se activará cuando haya menos de 10
plazas libres. Todo este mecanismo será controlado mediante una placa de Arduino.
los objetivos, habrá un display
incorporado en la entrada del parking que se activará cuando haya menos de 10
plazas libres. Todo este mecanismo será controlado mediante una placa de Arduino.
El mecanismo del ascensor, tanto en la planta baja
como en la segunda planta, también dispondrá de sensores infrarrojos que harán
que se active cuando haya un coche que quiera utilizarlo.
como en la segunda planta, también dispondrá de sensores infrarrojos que harán
que se active cuando haya un coche que quiera utilizarlo.
En cuanto se detecte
el coche, si el ascensor se encuentra en la misma planta que éste, se abrirá
automáticamente la puerta, gracias a un motor, a una reductora y a una correa
que desplazarán la puerta. En cambio, si se encuentran en distintas plantas, el
ascensor acudirá a la planta en la que sea detectado el coche y, cuando se
encuentre en dicha planta, se abrirá la puerta para que el coche pueda pasar.
el coche, si el ascensor se encuentra en la misma planta que éste, se abrirá
automáticamente la puerta, gracias a un motor, a una reductora y a una correa
que desplazarán la puerta. En cambio, si se encuentran en distintas plantas, el
ascensor acudirá a la planta en la que sea detectado el coche y, cuando se
encuentre en dicha planta, se abrirá la puerta para que el coche pueda pasar.
La apertura y el cierre de la puerta del ascensor de
la planta de abajo requerirán un tiempo de, aproximadamente, 1 segundo. Sin
embargo, la puerta de la planta de arriba tardará la mitad en hacer cada uno de
estas funciones. Pero al ser tiempos tan reducidos, no se notará la diferencia.
la planta de abajo requerirán un tiempo de, aproximadamente, 1 segundo. Sin
embargo, la puerta de la planta de arriba tardará la mitad en hacer cada uno de
estas funciones. Pero al ser tiempos tan reducidos, no se notará la diferencia.
2. ESQUEMA HARDWARE-SOFTWARE
Hemos dividido
este apartado en tres subapartados coincidiendo con las 3 funcionalidades más
importantes de nuestra maqueta.
este apartado en tres subapartados coincidiendo con las 3 funcionalidades más
importantes de nuestra maqueta.
2.1. Esquema de subida del ascensor
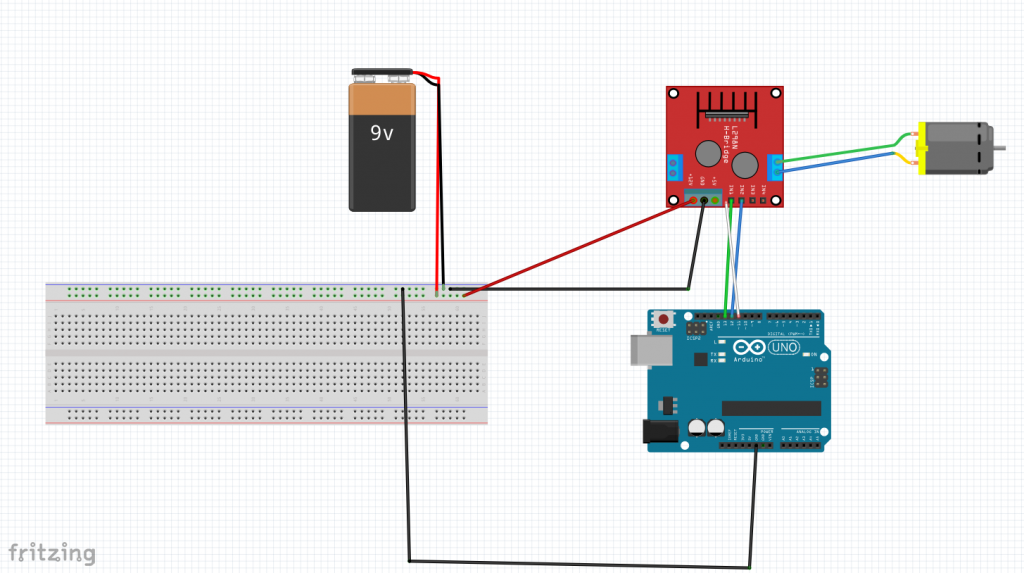
Este esquema se corresponde con la funcionalidad de
subida y bajada de la caja del ascensor que contiene al vehículo. El motor se
encuentra acoplado a un sistema motorreductor para aumentar dicha potencia de
movimiento vertical. Además se encuentra unido a un puente H tipo L298n, que
nos permite cambiar el sentido de giro del motor, y así realizar la función de
subida y bajada antes mencionada.
subida y bajada de la caja del ascensor que contiene al vehículo. El motor se
encuentra acoplado a un sistema motorreductor para aumentar dicha potencia de
movimiento vertical. Además se encuentra unido a un puente H tipo L298n, que
nos permite cambiar el sentido de giro del motor, y así realizar la función de
subida y bajada antes mencionada.
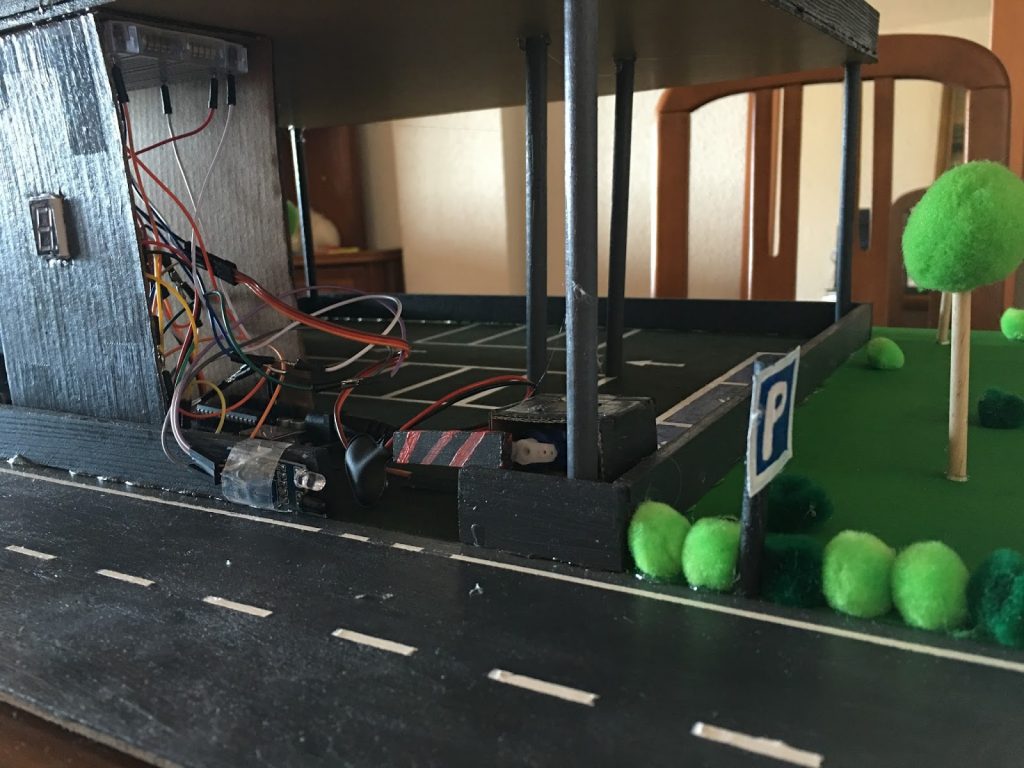
2.2. Esquema del mecanismo de entrada y salida del parking
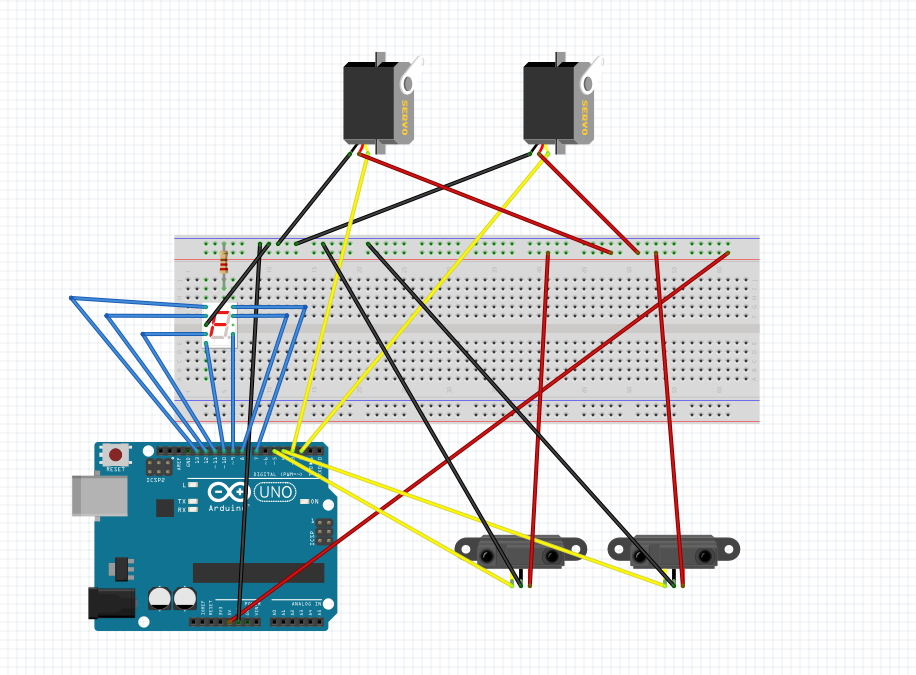
Esta segunda imagen se corresponde con la
funcionalidad de apertura y cierre de las barreras del parking. Este circuito
está alimentado por la corriente USB que proporciona una tensión de 5V,
suficiente para alimentar todo el circuito. Consta de dos sensores infrarrojos
los cuales permiten detectar al vehículo a la entrada y a la salida, accionando
en cada caso los servos del mismo circuito, los cuales levantarán las barreras
de acceso y salida del parking. Por último observamos también que disponemos de
un display de 7 segmentos, cuya función reside en mostrar numéricamente el
número de plazas disponibles en el parking. Debido a que únicamente se dispone
de un display, el caso de uso recogido se resume a contabilizar las últimas 10
plazas del parking.
funcionalidad de apertura y cierre de las barreras del parking. Este circuito
está alimentado por la corriente USB que proporciona una tensión de 5V,
suficiente para alimentar todo el circuito. Consta de dos sensores infrarrojos
los cuales permiten detectar al vehículo a la entrada y a la salida, accionando
en cada caso los servos del mismo circuito, los cuales levantarán las barreras
de acceso y salida del parking. Por último observamos también que disponemos de
un display de 7 segmentos, cuya función reside en mostrar numéricamente el
número de plazas disponibles en el parking. Debido a que únicamente se dispone
de un display, el caso de uso recogido se resume a contabilizar las últimas 10
plazas del parking.
2.3. Esquema del mecanismo de las puertas correderas
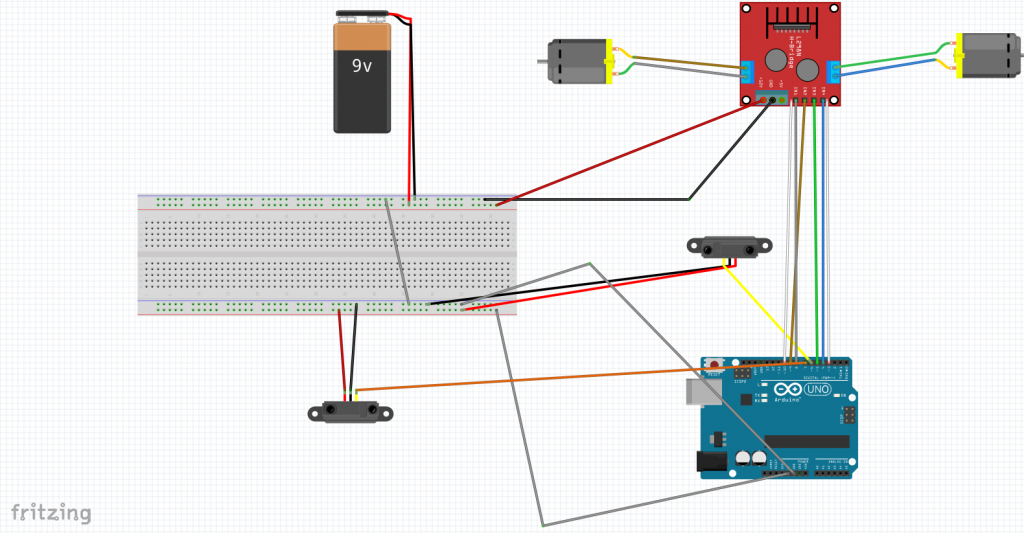
Este último esquema se corresponde con el
mecanismo de apertura y cierre de las puertas correderas. Este circuito está
alimentado por una fuente externa que suministra una tensión de 9V. Dicho
circuito dispone de dos sensores infrarrojos que detectan la llegada de los
coches a las puertas. Cuando esto se produce, una de las dos puertas, que se
corresponde en el esquema con los motores, pondrán en marcha los mismos y la
reductora se moverá a lo largo de un raíl para realizar el
movimiento de apertura y posteriormente de cierre. Esto será posible gracias a
la funcionalidad de inversión de giro del puente H. Para controlar la potencia
de apertura y cierre de puertas hemos utilizado una funcionalidad del puente H,
las entradas ENA y ENB. Dichas entradas producen una señal PWM (pulse width
modulation), que permite controlar la potencia del motor en un rango entre 0
(parado) y 255 (potencia máxima). Esto sirve para simular una velocidad de
apertura y cierre no tan inmediata como la señal digital 1.
mecanismo de apertura y cierre de las puertas correderas. Este circuito está
alimentado por una fuente externa que suministra una tensión de 9V. Dicho
circuito dispone de dos sensores infrarrojos que detectan la llegada de los
coches a las puertas. Cuando esto se produce, una de las dos puertas, que se
corresponde en el esquema con los motores, pondrán en marcha los mismos y la
reductora se moverá a lo largo de un raíl para realizar el
movimiento de apertura y posteriormente de cierre. Esto será posible gracias a
la funcionalidad de inversión de giro del puente H. Para controlar la potencia
de apertura y cierre de puertas hemos utilizado una funcionalidad del puente H,
las entradas ENA y ENB. Dichas entradas producen una señal PWM (pulse width
modulation), que permite controlar la potencia del motor en un rango entre 0
(parado) y 255 (potencia máxima). Esto sirve para simular una velocidad de
apertura y cierre no tan inmediata como la señal digital 1.
3. COMPONENTES Y PRECIOS
A continuación
observamos una lista con el inventario completo de componentes y herramientas
utilizadas.
observamos una lista con el inventario completo de componentes y herramientas
utilizadas.
Componente |
Precio |
Arduino UNO |
15€ |
Sensor IR |
4 x 3€ = 12€ |
Display de 7 segmentos de 1 dígito |
2€ |
Cables macho-hembra |
4€ |
Cables macho-macho |
4€ |
Servo 9g |
2 x 2.5€ = 5€ |
Placa protoboard |
4€ |
Pilas de 9V |
8 x 2€ = 16€ |
Doble puente H |
2 x 4€ = 8€ |
Motorreductor |
2 x 3€ = 6€ |
Madera |
50€ |
Utensilios bricolaje |
60€ |
Accesorios |
20€ |
TOTAL |
206€ |
4. TAREAS A REPARTIR
Debido a la complejidad de la
maqueta desarrollada, el desarrollo ha seguido numerosos pasos. A continuación
procederemos a sintetizarlos:
maqueta desarrollada, el desarrollo ha seguido numerosos pasos. A continuación
procederemos a sintetizarlos:
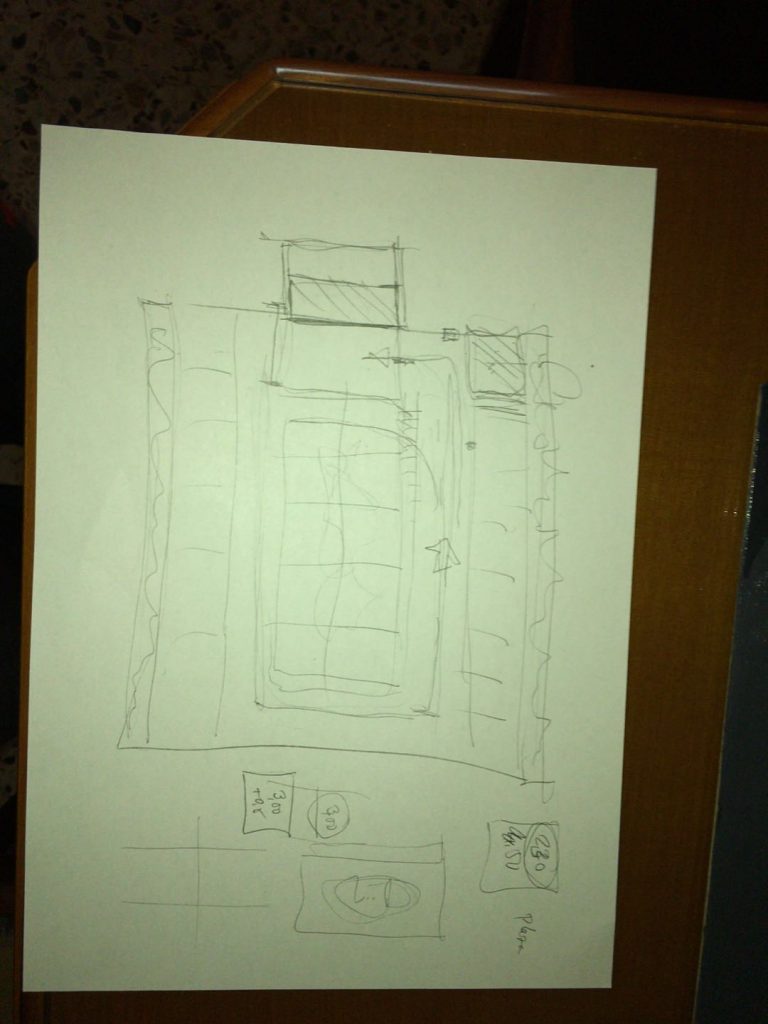
• Bocetos y medidas: el
primer acercamiento a cómo sería nuestro ascensor fue una charla en la cual nos
pusimos de acuerdo del tamaño y las medidas de la maqueta. Un parking de dos
plantas con un ascensor en uno de los laterales que permitiría subir a los
coches. El croquis y la hoja de cotas fue realizada por todos los componentes
del equipo.
primer acercamiento a cómo sería nuestro ascensor fue una charla en la cual nos
pusimos de acuerdo del tamaño y las medidas de la maqueta. Un parking de dos
plantas con un ascensor en uno de los laterales que permitiría subir a los
coches. El croquis y la hoja de cotas fue realizada por todos los componentes
del equipo.

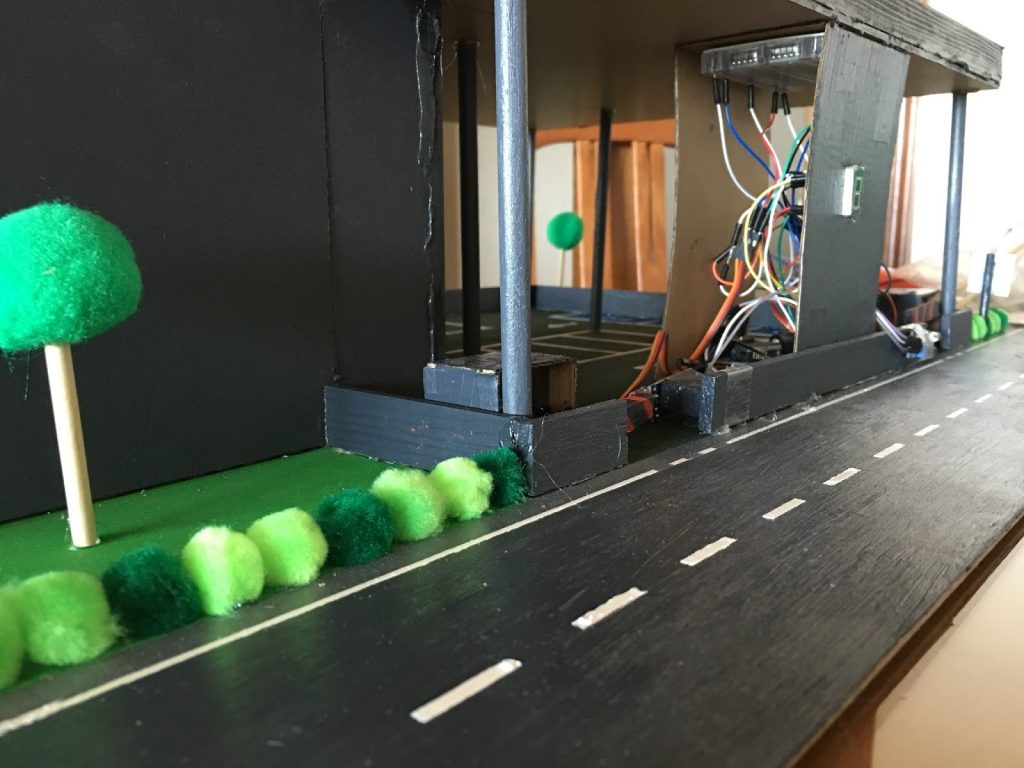
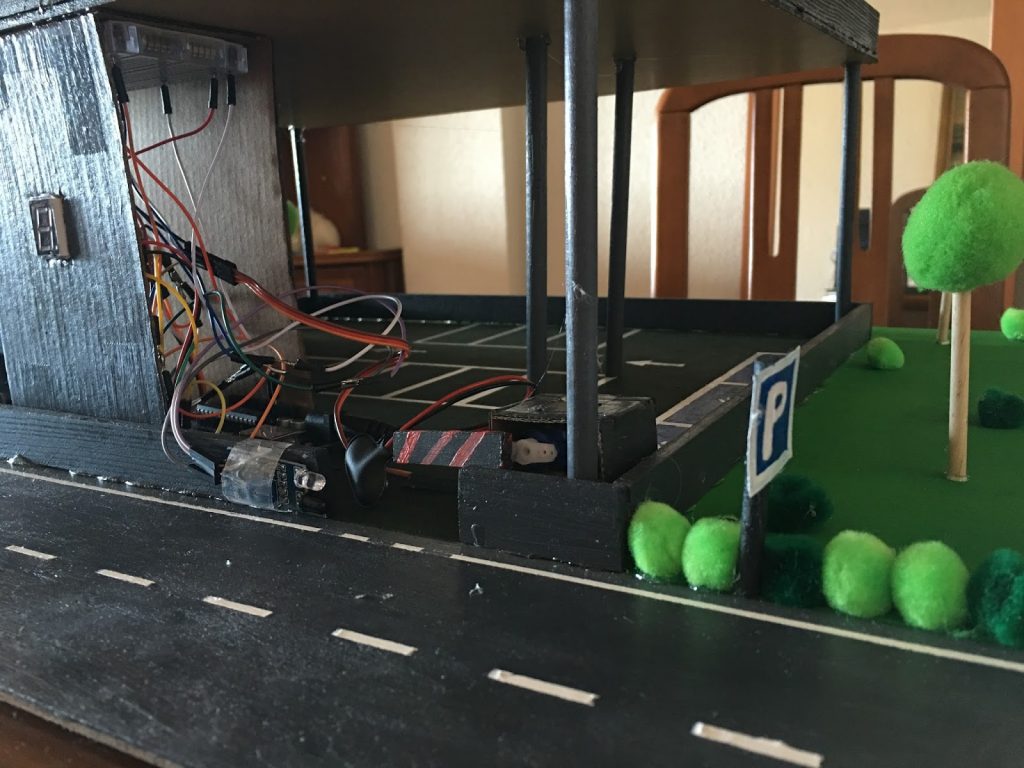
• Dibujo en la maqueta de las partes del parking: primero
realizamos el dibujo en el tablero inferior de como queríamos distribuir todos
los componentes. La planta baja del parking en la parte central del tablero,
una carretera en uno de los lados, un espacio para la caja del mecanismo del
ascensor y unas zonas verdes exteriores. Posteriormente realizamos el dibujo en
la planta baja de las plazas del parking. Esta tarea fue realizada por todos
los miembros del grupo.
realizamos el dibujo en el tablero inferior de como queríamos distribuir todos
los componentes. La planta baja del parking en la parte central del tablero,
una carretera en uno de los lados, un espacio para la caja del mecanismo del
ascensor y unas zonas verdes exteriores. Posteriormente realizamos el dibujo en
la planta baja de las plazas del parking. Esta tarea fue realizada por todos
los miembros del grupo.
• Construcción y ensamblaje de las puertas correderas: en
el módulo del ascensor realizamos unos cortes para colocar en la parte interior
las puertas correderas. Posteriormente colocamos la reductora con una serie de
soportes en dicho módulo, colocamos un tubo con un alambre central en el cual
pegamos la puerta para abrir y cerrar, y por último colocamos el raíl y lo
encuadramos con engranajes pegados a la reductora. Tarea realizada por Alejandro
Guzmán y Francisco Pérez.
el módulo del ascensor realizamos unos cortes para colocar en la parte interior
las puertas correderas. Posteriormente colocamos la reductora con una serie de
soportes en dicho módulo, colocamos un tubo con un alambre central en el cual
pegamos la puerta para abrir y cerrar, y por último colocamos el raíl y lo
encuadramos con engranajes pegados a la reductora. Tarea realizada por Alejandro
Guzmán y Francisco Pérez.
• Construcción del mecanismo de subida y bajada del ascensor: construcción
de la reductora que enrollará y desenrollará el cable del ascensor. Tarea
realizada por María Teresa Solano.
de la reductora que enrollará y desenrollará el cable del ascensor. Tarea
realizada por María Teresa Solano.

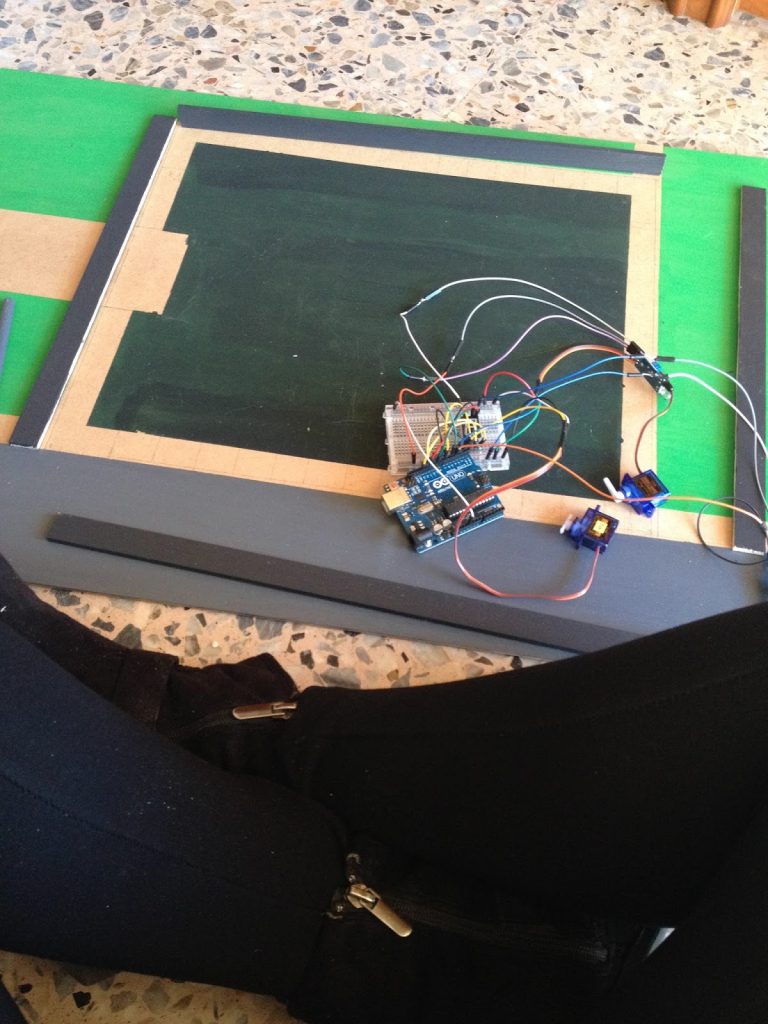
• Conexión del cableado: tarea realizada por Alejandro Guzmán.
• Realización del código: tarea realizada por Francisco Pérez.
• Pintura y decoración de la maqueta: pintado de ambas plantas, estructura y detalles visuales de la maqueta. Tarea realizada por María Teresa Solano.
5. PROBLEMAS Y SOLUCIONES
A continuación listaremos los problemas que se nos
han ido presentando durante la construcción de la maqueta y las acciones
llevadas a cabo para solventarlos.
han ido presentando durante la construcción de la maqueta y las acciones
llevadas a cabo para solventarlos.
• Materiales y
corte de piezas: en un principio la caja del ascensor iba a realizarse en
plástico transparente, porque queríamos realizar una maqueta atractiva
visualmente. Cuando fuimos a comprar los materiales, ninguna de las tiendas ni
grandes almacenes visitados realizaba cortes de metacrilato, por lo que tuvimos
que cambiar el diseño de la caja y realizarla de madera también, al igual que
el resto de la estructura. Además esto añadió otro problema, puesto que el
grosor de la madera comprada era mucho mayor que el del metacrilato y tuvimos
que reconstruir el boceto y las medidas de la caja del ascensor.
corte de piezas: en un principio la caja del ascensor iba a realizarse en
plástico transparente, porque queríamos realizar una maqueta atractiva
visualmente. Cuando fuimos a comprar los materiales, ninguna de las tiendas ni
grandes almacenes visitados realizaba cortes de metacrilato, por lo que tuvimos
que cambiar el diseño de la caja y realizarla de madera también, al igual que
el resto de la estructura. Además esto añadió otro problema, puesto que el
grosor de la madera comprada era mucho mayor que el del metacrilato y tuvimos
que reconstruir el boceto y las medidas de la caja del ascensor.
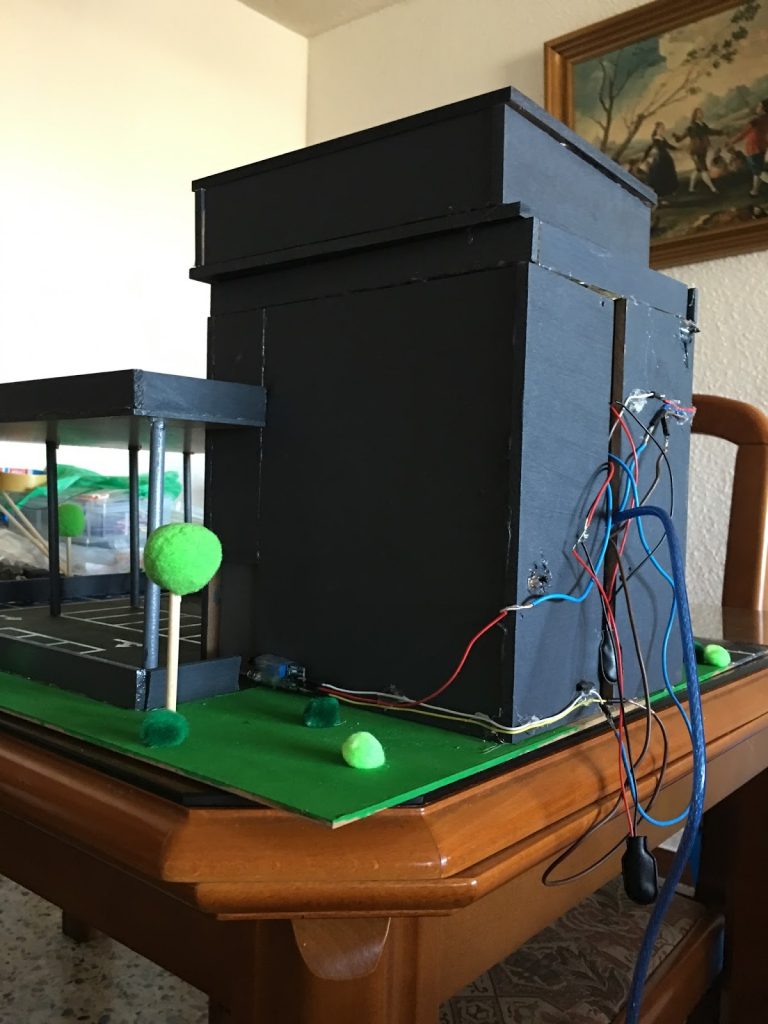
• Construcción del
módulo y módulo de apoyo: en un principio la estructura del ascensor estaba
dividida en dos módulos diferentes. El primero para la caja del ascensor por el
cual ascendería el coche, y el segundo con todos los circuitos y componentes
necesarios para su funcionamiento. Debido a la gran cantidad de componentes y
cables utilizados en la estructura, para no realizar agujeros para
interconectar ambos módulos decidimos unirlos en uno solo.
módulo y módulo de apoyo: en un principio la estructura del ascensor estaba
dividida en dos módulos diferentes. El primero para la caja del ascensor por el
cual ascendería el coche, y el segundo con todos los circuitos y componentes
necesarios para su funcionamiento. Debido a la gran cantidad de componentes y
cables utilizados en la estructura, para no realizar agujeros para
interconectar ambos módulos decidimos unirlos en uno solo.
Por otra parte, debido a la necesidad de
incluir una reductora con un cable para realizar la subida y bajada del
ascensor tuvimos que añadir en la parte superior otro módulo para colocarlo.
Todo ello provocó que tuviéramos que aumentar el tamaño de la estructura
dinámicamente.
incluir una reductora con un cable para realizar la subida y bajada del
ascensor tuvimos que añadir en la parte superior otro módulo para colocarlo.
Todo ello provocó que tuviéramos que aumentar el tamaño de la estructura
dinámicamente.
• Mecanismo de las
puertas automáticas: debido a que las reductoras compradas para el mecanismo
de las puertas tenían un tamaño considerable, tuvimos que recalcular su
posición varias veces en la estructura de la caja. Tuvimos que utilizar
estructuras de apoyo para colocarla y acoplarla al rail que abre y cierra la
puerta, utilizar apoyos al suelo y de la maqueta, para en este caso sujetar la
reductora de la parte superior.
puertas automáticas: debido a que las reductoras compradas para el mecanismo
de las puertas tenían un tamaño considerable, tuvimos que recalcular su
posición varias veces en la estructura de la caja. Tuvimos que utilizar
estructuras de apoyo para colocarla y acoplarla al rail que abre y cierra la
puerta, utilizar apoyos al suelo y de la maqueta, para en este caso sujetar la
reductora de la parte superior.
• Ascensor: este fue elcomponente
que más problemas supuso. Debido a que el ascenso de la caja del ascensor se
producía de manera irregular y no en línea recta como sería lo ideal, tuvimos
que recalcular el espacio en el interior del módulo para construir el ascensor.
Se tuvo que aumentar el tamaño de la caja, proporcionalmente al del módulo
total, se tuvieron que colocar listones de apoyo para que el ascensor subiera
de manera perpendicular y se realizaron ajustes para cuadrar la caja con las
puertas de acceso.
que más problemas supuso. Debido a que el ascenso de la caja del ascensor se
producía de manera irregular y no en línea recta como sería lo ideal, tuvimos
que recalcular el espacio en el interior del módulo para construir el ascensor.
Se tuvo que aumentar el tamaño de la caja, proporcionalmente al del módulo
total, se tuvieron que colocar listones de apoyo para que el ascensor subiera
de manera perpendicular y se realizaron ajustes para cuadrar la caja con las
puertas de acceso.
• Realización de
código: el código que realiza la apertura y cierre de puertas y realiza la
subida y bajada del ascensor supuso una complejidad notable, debido a la gran
cantidad de funciones, variables y estados simulados.
código: el código que realiza la apertura y cierre de puertas y realiza la
subida y bajada del ascensor supuso una complejidad notable, debido a la gran
cantidad de funciones, variables y estados simulados.
6. POSIBLES MEJORAS
En este apartado expondremos una lista de posibles mejorar a
implementar en un futuro refinamiento del proyecto. Algunas de las mismas se
han intentado implementar en esta primera versión, pero debido a la falta de
tiempo propiciada por la construcción de la estructura o por la no obtención de
ciertos componentes no se han podido realizar:
implementar en un futuro refinamiento del proyecto. Algunas de las mismas se
han intentado implementar en esta primera versión, pero debido a la falta de
tiempo propiciada por la construcción de la estructura o por la no obtención de
ciertos componentes no se han podido realizar:
• Utilización de finales de carrera
como tope en las puertas y ascensor: debido a los problemas ocasionados por la
inclusión de los finales de carrera a la estructura del proyecto (tope no
detectado, señales no enviadas o cambiadas de valor, imposibilidad de
acoplarlos por espacio), decidimos simplificar el diseño realizando cálculos
del tiempo que tarda cada componente en realizar su función. En una versión
posterior se podrían reconstruir los componentes adaptando los finales de
carrera a los lados de las puertas correderas y en lo alto y bajo del ascensor,
y que sus señales sean utilizadas para manejar los cambios de dirección y la
subida y bajada del ascensor.
como tope en las puertas y ascensor: debido a los problemas ocasionados por la
inclusión de los finales de carrera a la estructura del proyecto (tope no
detectado, señales no enviadas o cambiadas de valor, imposibilidad de
acoplarlos por espacio), decidimos simplificar el diseño realizando cálculos
del tiempo que tarda cada componente en realizar su función. En una versión
posterior se podrían reconstruir los componentes adaptando los finales de
carrera a los lados de las puertas correderas y en lo alto y bajo del ascensor,
y que sus señales sean utilizadas para manejar los cambios de dirección y la
subida y bajada del ascensor.
• Control interno e individual del
número de plazas: este apartado hace referencia a la inclusión (en las plazas
de la planta cubierta) de sensores que detecten si un vehículo se encuentra
ocupando una plaza de parking. Para que los usuarios sepan la localización
exacta de una plaza libre, en la parte superior de cada plaza se colocarían dos
leds, uno rojo que se encenderá cuando la plaza esté ocupada y uno verde que
permanecerá encendido cuando la plaza esté libre.
número de plazas: este apartado hace referencia a la inclusión (en las plazas
de la planta cubierta) de sensores que detecten si un vehículo se encuentra
ocupando una plaza de parking. Para que los usuarios sepan la localización
exacta de una plaza libre, en la parte superior de cada plaza se colocarían dos
leds, uno rojo que se encenderá cuando la plaza esté ocupada y uno verde que
permanecerá encendido cuando la plaza esté libre.
• Señal luminosa indicadora de uso
del ascensor: esta funcionalidad hace referencia a la colocación en las puertas
de entrada y salida del ascensor de dos leds, al igual que en el apartado
anterior, pero esta vez el rojo indicando que el ascensor está siendo utilizado
y verde cuando se encuentra disponible para su uso.
del ascensor: esta funcionalidad hace referencia a la colocación en las puertas
de entrada y salida del ascensor de dos leds, al igual que en el apartado
anterior, pero esta vez el rojo indicando que el ascensor está siendo utilizado
y verde cuando se encuentra disponible para su uso.
• Usar un display de dos dígitos
para abarcar el número total de plazas del parking: como hemos comentado
anteriormente en el esquema hardware-software nuestro contador muestra las
plazas libres cuando quedan menos de 10. Con el añadido de otro display
podremos controlar el número total de plazas del parking.
para abarcar el número total de plazas del parking: como hemos comentado
anteriormente en el esquema hardware-software nuestro contador muestra las
plazas libres cuando quedan menos de 10. Con el añadido de otro display
podremos controlar el número total de plazas del parking.

