Grupo 6 – Mecanuino SEyTR Móstoles 2016-2017
Mecanuino
1. Introducción
Este proyecto trata sobre un coche radiocontrol que hace uso de ruedas de tipo Mecanum, las cuales permiten una libertad de movimiento mucho mayor que las de un coche normal, en varios ejes distintos, tal y como se detallará más adelante.
Rueda mecánica

El coche será controlado desde una app en Android que envía mediante bluetooth los movimientos que queremos realizar.
2. Materiales

| Componente | Unidades | Precio x Unidad | Precio final |
|---|---|---|---|
| Mecanum Wheels | 4 | 19,25 € | 77 € |
| 4mm Aluminum Mounting Hub for 60mm Mecanum Wheel | 4 | 10 € | 30 € |
| TB6612FNG Dual Motor Driver Carrier | 2 | 5 € | 10 € |
| DC motor 12V | 4 | 5€ | 20€ |
| HC-06 bluetooth module or similar | 1 | 6€ | 6€ |
| Arduino Mega 2560 | 1 | 10 € | 10€ |
| Breadboard | 1 | 2€ | 2€ |
| Li-Po battery 7.4V 1800 mAh | 1 | 11 € | 11 € |
| Li-Po battery 11.1V 3000 mAh | 1 | 23 € | 23 € |
| SKYRC iMAX B6 Mini battery charger | 1 | 37€ | 37€ |
| Chassis | 1 | Reciclado | 0 € |
| Cables | 1 | 1€ | 1 € |
| Total | – | – | 216 € |
3. Esquema de conexiones
El cerebro Arduino del proyecto es una Mega 2560. En cuanto al resto de componentes electrónicos, destacan el módulo Bluetooth HC-06 (que solo puede actuar de esclavo) y los dos Dual Motor Driver Carriers.
Estos componentes permiten controlar dos motores de corriente directa de entre 4,5 y 13,5 voltios, regulando tanto su velocidad como su dirección.
4. Montaje
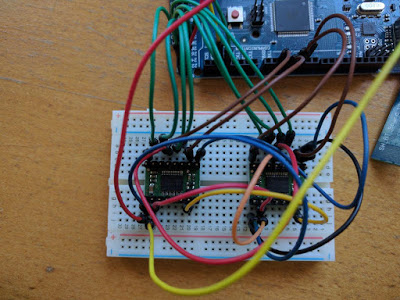
Fase 1: Circuito
En primer lugar, comenzamos a realizar todas las conexiones de la placa de arduino con el módulo Bluetooth y los controladores de los motores, tal y como se muestra en el esquema de conexiones.
Fase 2: Conexión con los motores
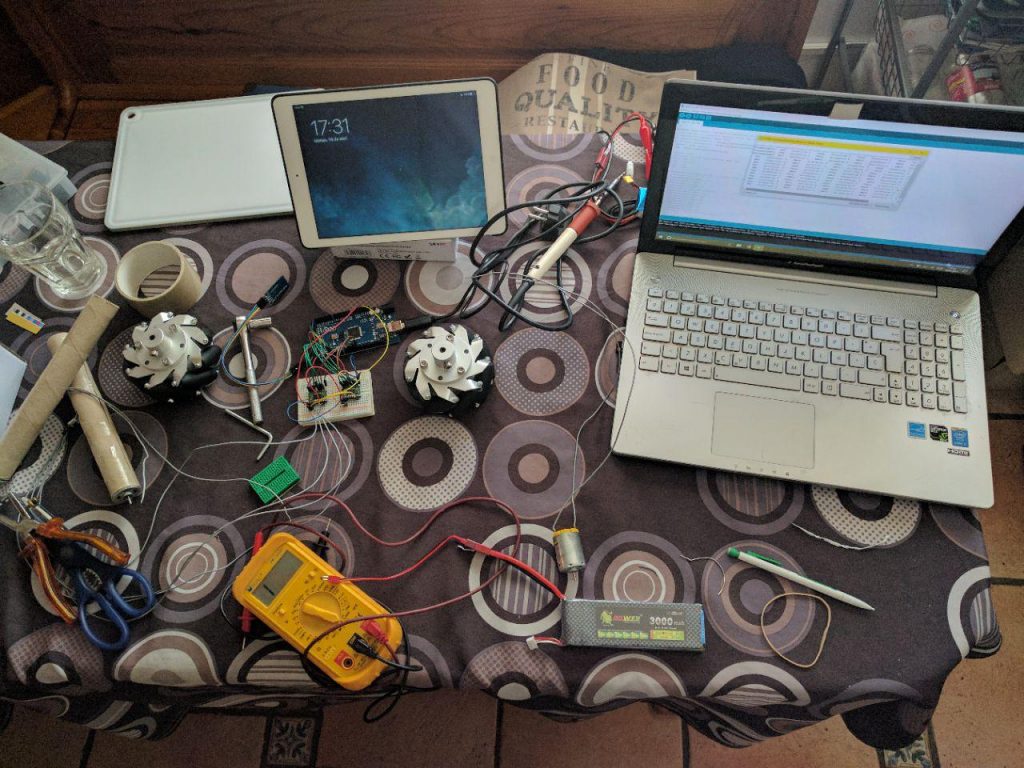
Al tener 4 motores independientes, y para asegurar el correcto funcionamiento de los mismo con los movimientos mencionados, hicimos una prueba con ruedas de cartón, donde probábamos además la conexión App de Android -> Módulo Bluetooth -> Arduino -> Motores
Fase 3: Conexión rueda-motor
Una vez comprobamos que el funcionamiento de los motores, sustituimos las ruedas de cartón por las ruedas mecánicas:

Resultado final:


5. Funcionamiento
Funcionamiento físico
La física detrás de este coche se basa en operaciones de suma de fuerzas vectoriales muy sencillas. Para los movimientos permitidos se adjuntan a continuación un diagrama en el que se exponen dichas fuerzas:
Hacia delante
Hacia atrás
Hacia la izquierda
Hacia la derecha
Diagonal adelante izquierda
Diagonal adelante derecha
Diagonal atrás izquierda
Diagonal atrás derecha
Funcionamiento software
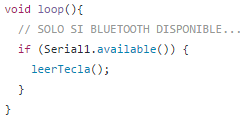
La parte de Arduino se encarga de escuchar el Serial1, que corresponde a la conexión bluetooth.
La app en Android se encarga de enviar el movimiento que elije el usuario a través del módulo bluetooth:

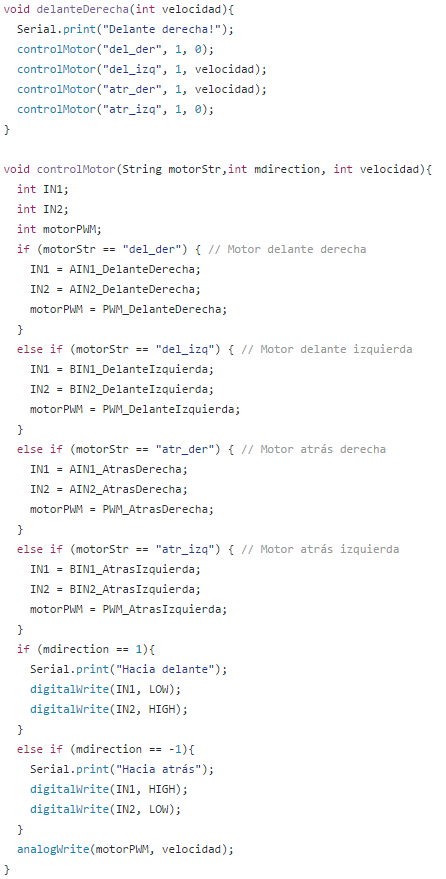
Arduino se encarga de leer la información que le llega al módulo, que para simplificarlo, será únicamente un caracter. Para un movimiento diagonal, arriba a la derecha, el código (simplificado) sería:
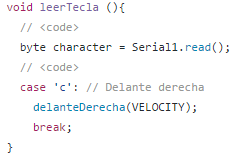
Este movimiento requerirá el uso de dos motores (delante izquierda y atrás derecha), dejando los otros dos inactivos (velocidad = 0)
Demo
Nota: El coche se encuentra suspendido para evitar la fricción de las ruedas con el suelo a fin de poder apreciar los giros de las mismas.
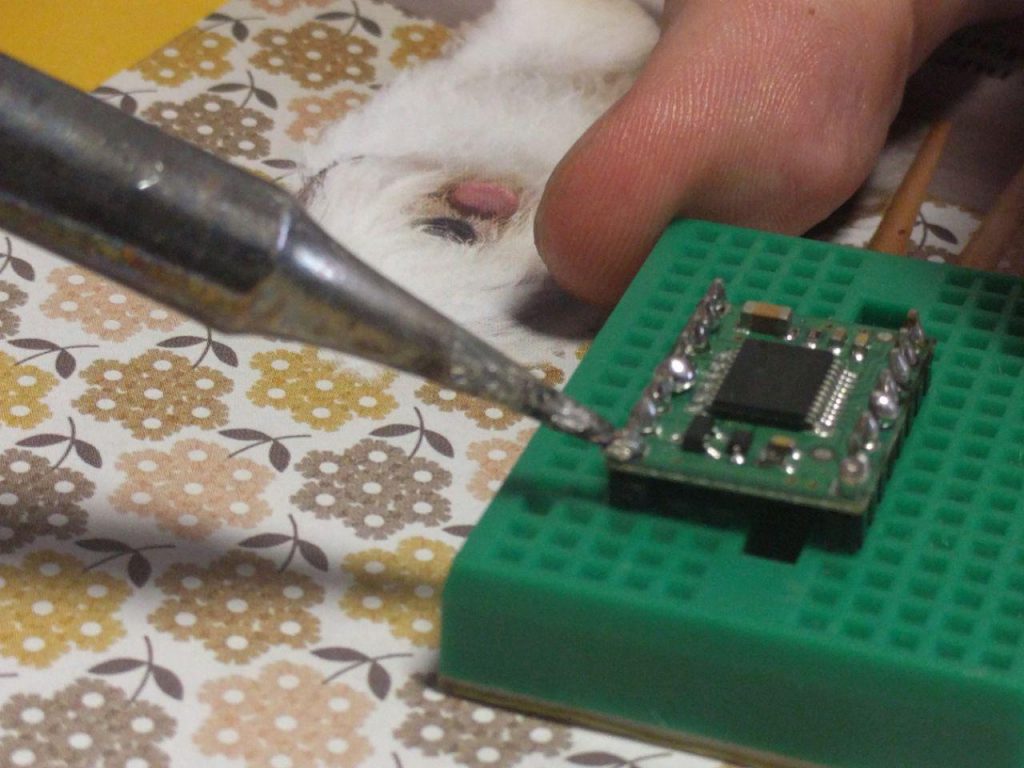
6. Problemas y soluciones
Entre los primeros problemas que nos encontramos estaba la soldadura de los pines de los controladores al breadboard. Con que una de las conexiones no estuviese correctamente realizada, no se producía respuesta por parte del controlodar. Mediante el uso de un voltímetro y tras realizar lo que podría llegar a llamarse microsoldadura varias veces, conseguimos que funcionaran todas las conexiones.
El mayor problema que nos encontramos y al que no hemos podido dar solución es la conexión de las ruedas y los motores. Las ruedas resultaron demasiado grandes y sobre todo demasiado pesadas para los motores, por lo que al poner en coche en el suelo, los motores no tenían suficiente par para desplazar el vehículo. Para este problema había dos soluciones: usar motores mas potentes (y la consiguiente batería) o utilizar ruedas más pequeñas (de 60mm). En cualquier caso, ambas soluciones y dado el presupuesto del proyecto (y las fechas de envío, unos 60 días) nos imposibilitaron hallar una solución a tiempo.
7. Posibles mejoras
Resueltos los problemas mencionados, entre las posibles mejoras podemos destacar:
- Mejora del chasis, tanto a nivel estetico como estructural
- Explorar nuevos movimientos (rotación sobre si mismo)
- Adición de memoria de rutas
- Integración de una webcam para control remoto
8. Anexos
Repositorio de GitHub dónde se encuentra el código
App de Android para el control del vehículo
Presentación del proyecto en Prezi


