Grupo 3 (Wally) Vicálvaro.
Somos el grupo 3 (Wally) y nuestro proyecto consiste en un
pequeño automóvil sigue líneas que es capaz de detenerse si encuentra un
obstáculo en el camino y de emitir un sonido para avisar del problema.
pequeño automóvil sigue líneas que es capaz de detenerse si encuentra un
obstáculo en el camino y de emitir un sonido para avisar del problema.
En el
blog explicaremos el proceso que hemos seguido para elaborarlo, el resto de
apartados como los precios de los componentes, otras ideas propuestas y las
alternativas propuestas están en la memoria. No queremos escribirlo en el blog
puesto que son ideas secundarias y ya viene detallado en el documento.
blog explicaremos el proceso que hemos seguido para elaborarlo, el resto de
apartados como los precios de los componentes, otras ideas propuestas y las
alternativas propuestas están en la memoria. No queremos escribirlo en el blog
puesto que son ideas secundarias y ya viene detallado en el documento.
El
proceso comienza con la idea de hacer un pequeño robot que tenga forma de
Wall-e, que sea capaz de seguir líneas. Dado que es un proyecto sencillo y
somos cuatro integrantes en el grupo decidimos ampliar el proyecto añadiendo el
resto de elementos mencionados anteriormente.
proceso comienza con la idea de hacer un pequeño robot que tenga forma de
Wall-e, que sea capaz de seguir líneas. Dado que es un proyecto sencillo y
somos cuatro integrantes en el grupo decidimos ampliar el proyecto añadiendo el
resto de elementos mencionados anteriormente.
Necesitaremos:
Para el funcionamiento de las
ruedas:
ruedas:
·
Dos
motores DC con 3 pequeños engranajes para las ruedas.
Dos
motores DC con 3 pequeños engranajes para las ruedas.
·
Motor
shield para el funcionamiento de los motores DC.
Motor
shield para el funcionamiento de los motores DC.
·
Tabla
de contrachapado.
Tabla
de contrachapado.
Para el funcionamiento del sigue líneas:
·
4
LDR.
4
LDR.
·
4
diodos.
4
diodos.
·
4
infrarrojos emisor para seguir la línea.
4
infrarrojos emisor para seguir la línea.
·
4
infrarrojos detector para seguir la línea
4
infrarrojos detector para seguir la línea
·
1
potenciómetro para graduar los infrarrojos que siguen la línea.
1
potenciómetro para graduar los infrarrojos que siguen la línea.
·
4
resistencias para los infrarrojos detectores.
4
resistencias para los infrarrojos detectores.
·
1
resistencia para los 4 infrarrojos emisores.
1
resistencia para los 4 infrarrojos emisores.
·
1
protoboard.
1
protoboard.
Otros componentes:
·
1
interruptor para encender/apagar el coche.
1
interruptor para encender/apagar el coche.
·
Cables.
Cables.
·
Pilas.
Pilas.
·
Bridas.
Bridas.
·
Cinta
aislante.
Cinta
aislante.
·
Pegamento
y pistola termofusible.
Pegamento
y pistola termofusible.
·
Soldador.
Soldador.
Altavoz
·
Condensador.
Condensador.
·
Altavoz.
Altavoz.
Sensor de distancia.
·
Sensor
Sharp0A41SKF27.
Sensor
Sharp0A41SKF27.
Para
conocer mejor los componentes daremos ahora una breve explicación sobre que
entradas utilizan y cómo funcionan.
conocer mejor los componentes daremos ahora una breve explicación sobre que
entradas utilizan y cómo funcionan.
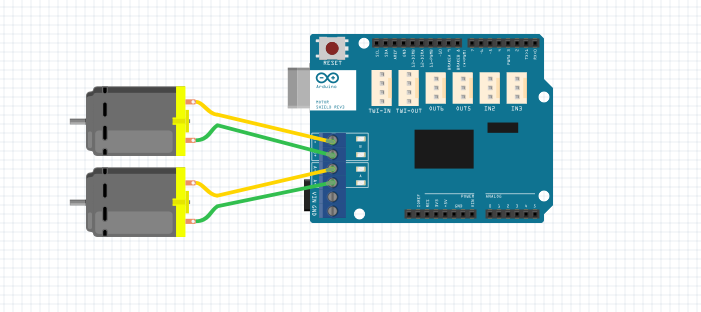
Para
comenzar tenemos los motores DC, el motor shield, las ruedas y la estructura
del coche. El motor shield nos ayudará a conectar los motores a la placa de
Arduino. En este caso nos hemos decantado por uno en el que había que soldar,
pero cada uno es libre de escoger el que desee. Los motores DC se pueden
sustituir por motores paso a paso, ya que será más sencillo controlarlos para
leer líneas. Será necesario importar la librería adafruit AFMotor para que el
código funcione. Existen otro tipo de motores que no necesitan de librería,
ejemplo puente h l298. A continuación
mostramos una imagen con el esquema correspondiente:
comenzar tenemos los motores DC, el motor shield, las ruedas y la estructura
del coche. El motor shield nos ayudará a conectar los motores a la placa de
Arduino. En este caso nos hemos decantado por uno en el que había que soldar,
pero cada uno es libre de escoger el que desee. Los motores DC se pueden
sustituir por motores paso a paso, ya que será más sencillo controlarlos para
leer líneas. Será necesario importar la librería adafruit AFMotor para que el
código funcione. Existen otro tipo de motores que no necesitan de librería,
ejemplo puente h l298. A continuación
mostramos una imagen con el esquema correspondiente:
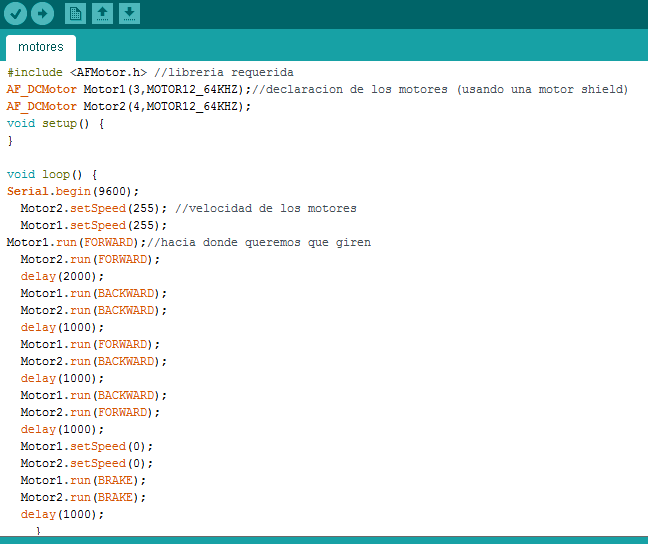
A continuación
mostramos un pequeño código para poder probar que los motores funcionan
correctamente.
mostramos un pequeño código para poder probar que los motores funcionan
correctamente.
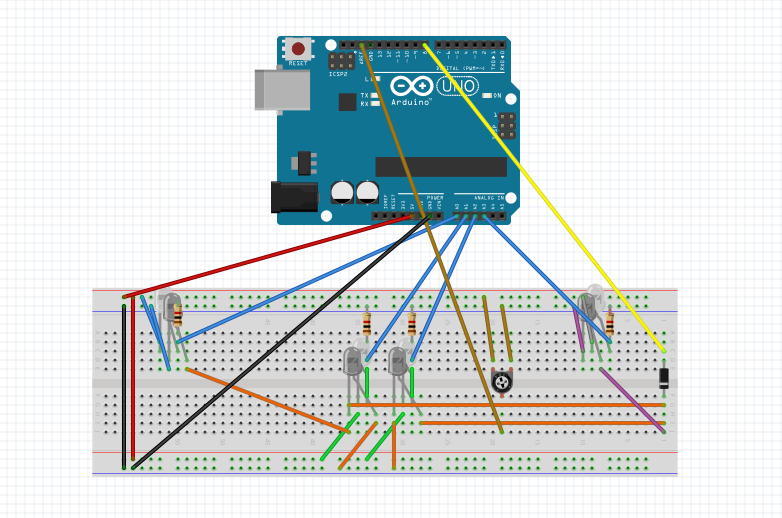
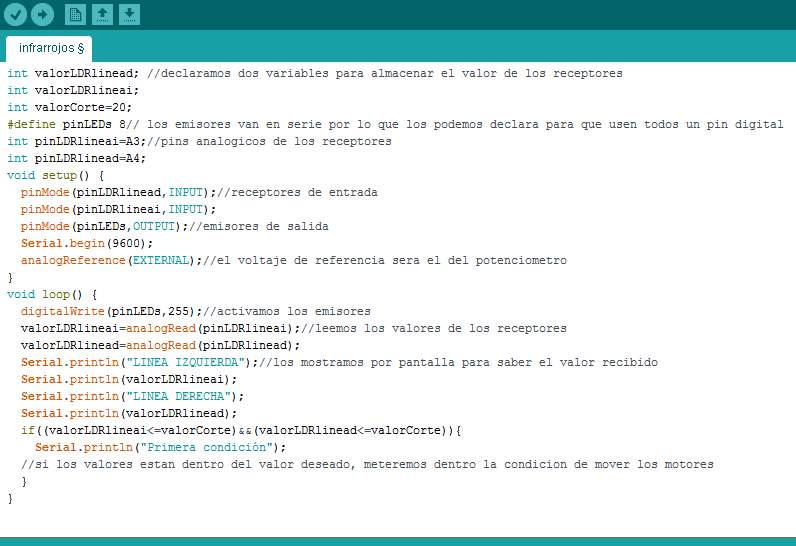
En segundo lugar los infrarrojos
emisores son simples diodos LED, pero al ser infrarrojos no podemos percibir la
luz. Esto ayudará a que los infrarrojos receptores, que tienen entradas
analógicas, puedan detectar con mayor precisión los cambios de color. Los
primeros no necesitan ningún tipo de entrada, simplemente conectarse a un
circuito que hemos colocado en una placa base, junto con unas resistencias y un
potenciómetro, para poder calibrar los sensores y que su funcionamiento sea el
esperado. A continuación se muestra el esquema correspondiente:
emisores son simples diodos LED, pero al ser infrarrojos no podemos percibir la
luz. Esto ayudará a que los infrarrojos receptores, que tienen entradas
analógicas, puedan detectar con mayor precisión los cambios de color. Los
primeros no necesitan ningún tipo de entrada, simplemente conectarse a un
circuito que hemos colocado en una placa base, junto con unas resistencias y un
potenciómetro, para poder calibrar los sensores y que su funcionamiento sea el
esperado. A continuación se muestra el esquema correspondiente:
Procederemos ahora a enseñar el
código correspondiente a esta parte para que podáis comprobar si vuestro circuito
es correcto o si vuestros elementos están conectados correctamente:
código correspondiente a esta parte para que podáis comprobar si vuestro circuito
es correcto o si vuestros elementos están conectados correctamente:
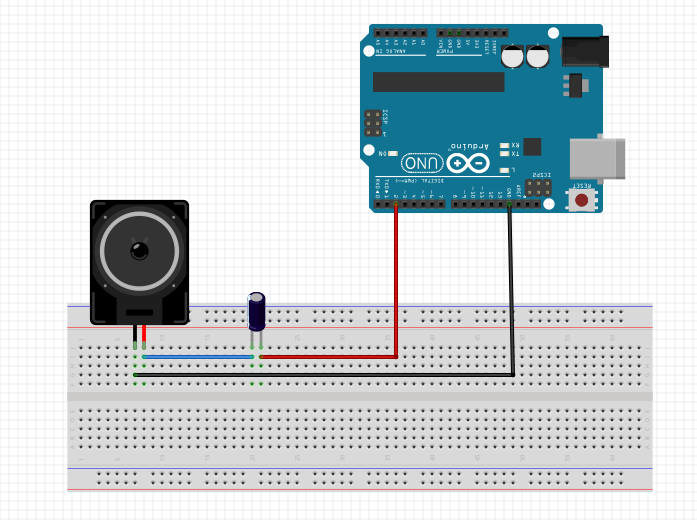
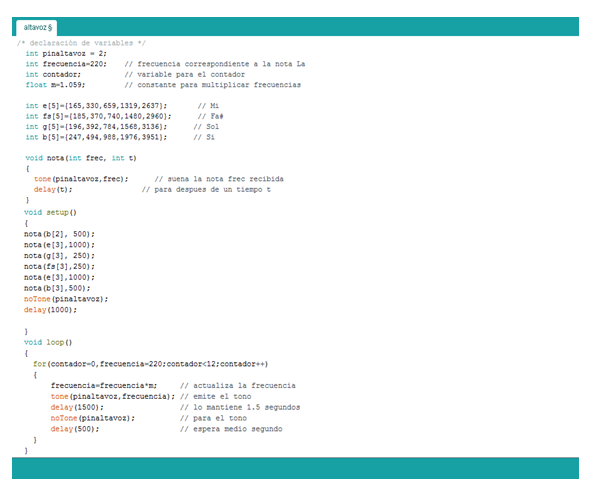
El
tercer elemento que probaremos será el altavoz. Hay que tener en cuenta que
utiliza frecuencias y que debemos tener bien definidas las notas en el código
para no reproducir sonidos no deseados. Las conexiones son sencillas, y no
necesita ningún pin analógico. Ahora procederemos a mostrar el esquema del
hardware para conectar el altavoz a Arduino:
tercer elemento que probaremos será el altavoz. Hay que tener en cuenta que
utiliza frecuencias y que debemos tener bien definidas las notas en el código
para no reproducir sonidos no deseados. Las conexiones son sencillas, y no
necesita ningún pin analógico. Ahora procederemos a mostrar el esquema del
hardware para conectar el altavoz a Arduino:
Una vez
conectado deberíamos poner el código, que es el siguiente:
conectado deberíamos poner el código, que es el siguiente:
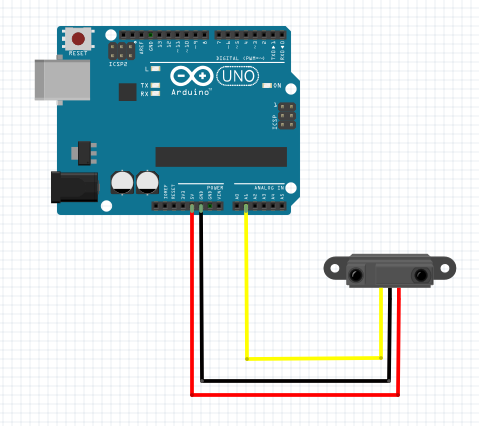
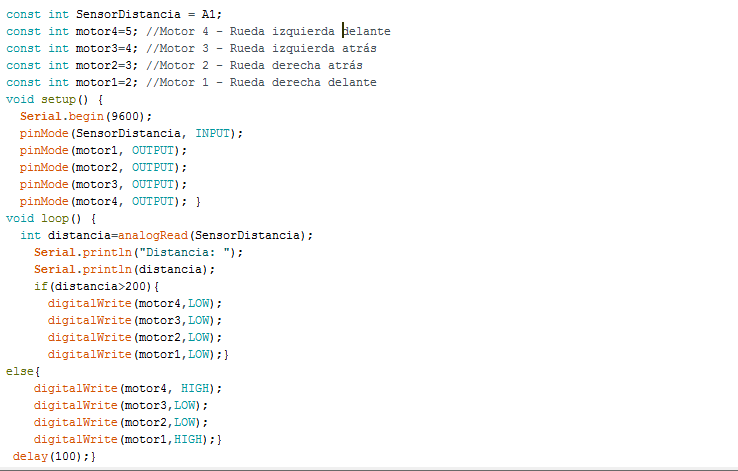
Por
último, procederemos a conectar el sensor de distancia. Se trata de un sensor
infrarrojo que alcanza a percibir distancias entre 10 y 30 u 80
centímetros. Necesita una entrada
analógica puesto que mide la distancia a la que se encuentra un objeto mediante
señales y dependiendo de la distancia da un valor u otro. Aquí presentamos el
esquema hardware:
último, procederemos a conectar el sensor de distancia. Se trata de un sensor
infrarrojo que alcanza a percibir distancias entre 10 y 30 u 80
centímetros. Necesita una entrada
analógica puesto que mide la distancia a la que se encuentra un objeto mediante
señales y dependiendo de la distancia da un valor u otro. Aquí presentamos el
esquema hardware:
Y aquí está el código.
Para
finalizar con la explicación añadiremos un esquema con todos los elementos
conectados y con el código final para poder terminar el proyecto.
finalizar con la explicación añadiremos un esquema con todos los elementos
conectados y con el código final para poder terminar el proyecto.
Aquí
mostramos el esquema hardware completo:
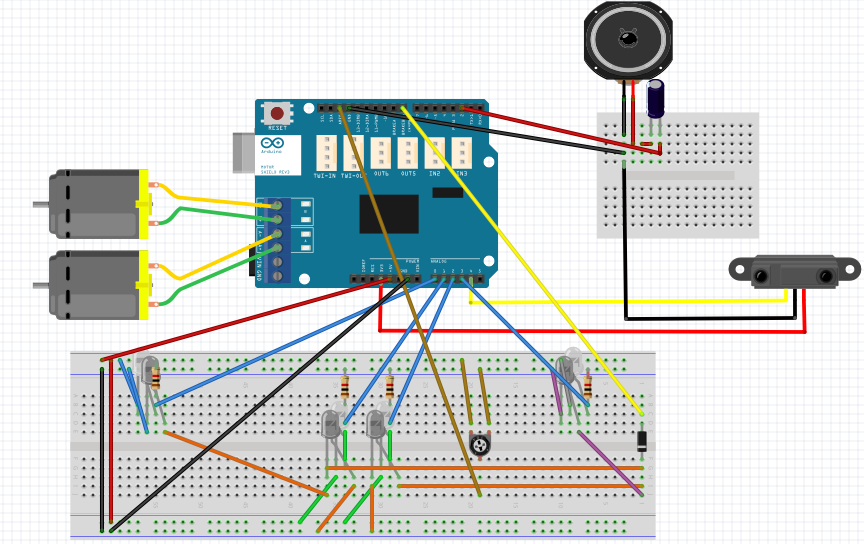
mostramos el esquema hardware completo:
El código completo lo
proporcionaremos en un archivo diferente o también se puede ver en la memoria,
ya que son bastantes líneas y no se pueden apreciar bien algunos detalles.
proporcionaremos en un archivo diferente o también se puede ver en la memoria,
ya que son bastantes líneas y no se pueden apreciar bien algunos detalles.
Vídeo del sigue líneas:
Vídeo
sobre el altavoz:
sobre el altavoz:
Vídeo
sobre el sensor de distancia:
sobre el sensor de distancia:
Vídeo
completo:
completo:
Vídeo
extra:
extra:
Memoria y código del proyecto:
https://drive.google.com/folderview?id=0B6JPFYc14C8-ZU55MjU3andqZms&usp=sharing
Muchas gracias a todos y un saludo.