Mano robótica – Grupo 9
Grupo
9 – Mano robótica
9 – Mano robótica
·
Álvaro González López
Álvaro González López
·
Álvaro Campos Serrano
Álvaro Campos Serrano
·
Alejandro Barona Palencia
Alejandro Barona Palencia
·
Alberto Roldán Ruiz
Alberto Roldán Ruiz
1. Introducción:
Nuestra idea principal para el proyecto se
centra en el desarrollo de una mano robótica que realizará un movimiento al
mover alguno de nuestros dedos, gracias a un guante con sensores de flexión.
centra en el desarrollo de una mano robótica que realizará un movimiento al
mover alguno de nuestros dedos, gracias a un guante con sensores de flexión.
2. Materiales:
Materiales |
Cantidad |
Precio |
Total |
Arduino UNO |
1 |
Ya en propiedad |
|
Resistencias 10K |
5 |
0.004 € |
0.02 € |
Breadboard |
1 |
4.54 € |
4.54 € |
Sensor de flexión 4.5” |
1 |
11.39 € |
11.39 € |
Sensor de flexión 2.2” |
4 |
7.95 € |
31.80 € |
Cables Dupont |
30 |
4.61 € |
4.61 € |
Servo TowerPro SG90 |
5 |
2.04 € |
10.20 € |
Guantes |
1 |
2 € |
2 € |
Cintas elástica |
1 |
2 € |
2 € |
Soldador y estaño |
1 |
Ya en propiedad |
|
Sedal |
1 |
2 € |
2 € |
Bolas para pulseras |
1 |
1.20 € |
1.20 € |
Cinta de carrocero |
1 |
Ya en propiedad |
|
Cartón |
3 |
Ya en propiedad |
|
Total: |
69.76 € |
||
3. Montaje:
- Creación de la estructura de la mano: nuestro primer paso
realizar un primer prototipo de la mano, con el que realizaríamos las primeras
pruebas de funcionamiento. Y así, después, poder crear el prototipo final.
Para crear los dedos
utilizamos 5 tiras de cartón, y para realizar el cuerpo del brazo y mano,
utilizamos dos capas de cartón para otorgarle robustez y dureza.
utilizamos 5 tiras de cartón, y para realizar el cuerpo del brazo y mano,
utilizamos dos capas de cartón para otorgarle robustez y dureza.
Para que los dedos
realizarán bien el movimiento, doblamos las tiras para representar las falanges
y pegamos en los dedos y en la mano unas pequeñas bolitas para hacer pulseras
para así pasar por ellas el sedal.
realizarán bien el movimiento, doblamos las tiras para representar las falanges
y pegamos en los dedos y en la mano unas pequeñas bolitas para hacer pulseras
para así pasar por ellas el sedal.
Para que los dedos
retrocedieran, pegamos en la parte trasera cinta elástica.
retrocedieran, pegamos en la parte trasera cinta elástica.
- Montaje del circuito: los primeros pasos que
realizamos, fue conectar los elementos para el movimiento de un único dedo.
Este paso lo realizamos al principio del primer prototipo de la mano para
comprobar el funcionamiento.
El siguiente paso fue ir
conectando los componentes para ir añadiendo la movilidad al resto de los
dedos.
conectando los componentes para ir añadiendo la movilidad al resto de los
dedos.
- Pasos finales: como último paso,
adecuamos una caja para nuestras necesidades para ocultar el circuito y así
evitar que se vieran tantos cables. Y unimos con otra lámina de cartón la mano
con la caja para dar mayor robustez.
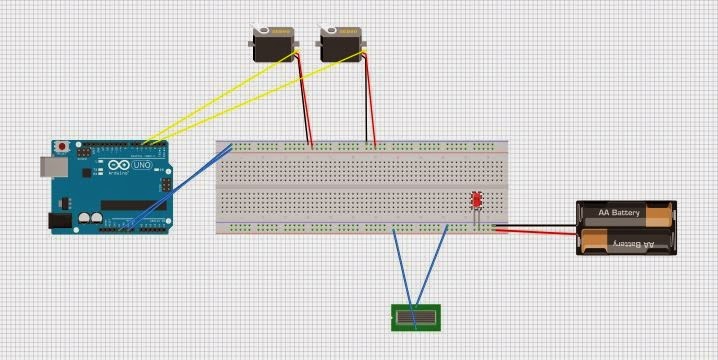
4. Esquema hardware:
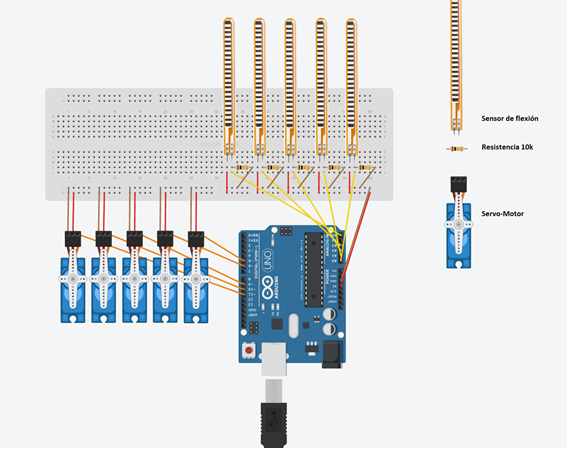
Imagen 1
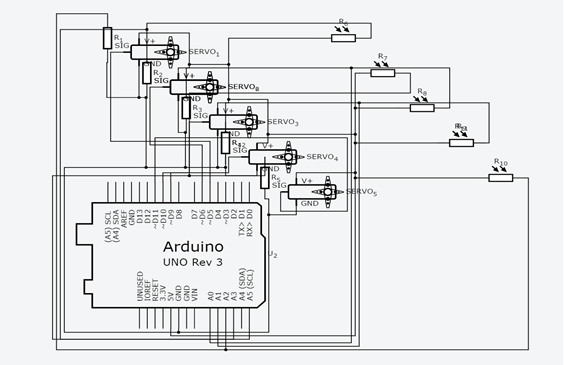
Imagen 2
5. Trabajo realizado por
cada uno de los componentes:
cada uno de los componentes:
En el proyecto han participado cada uno de
los integrantes en:
los integrantes en:
·
Creación de la mano.
Creación de la mano.
·
Elaboración del código.
Elaboración del código.
·
Elaboración del circuito.
Elaboración del circuito.
·
Montaje de la mano junto a la plataforma que contiene el arduino.
Montaje de la mano junto a la plataforma que contiene el arduino.
6. Problemas encontrados:
·
Saber exactamente cómo y con qué materiales íbamos a hacer la mano.
Saber exactamente cómo y con qué materiales íbamos a hacer la mano.
·
Sufrimos muchas interferencias entre las entradas analógicas.
Sufrimos muchas interferencias entre las entradas analógicas.
·
Calibrar la tensión de los flexores para un correcto funcionamiento.
Calibrar la tensión de los flexores para un correcto funcionamiento.
·
Juntar toda la estructura del brazo para que fuese sólida.
Juntar toda la estructura del brazo para que fuese sólida.
7. Anexo :
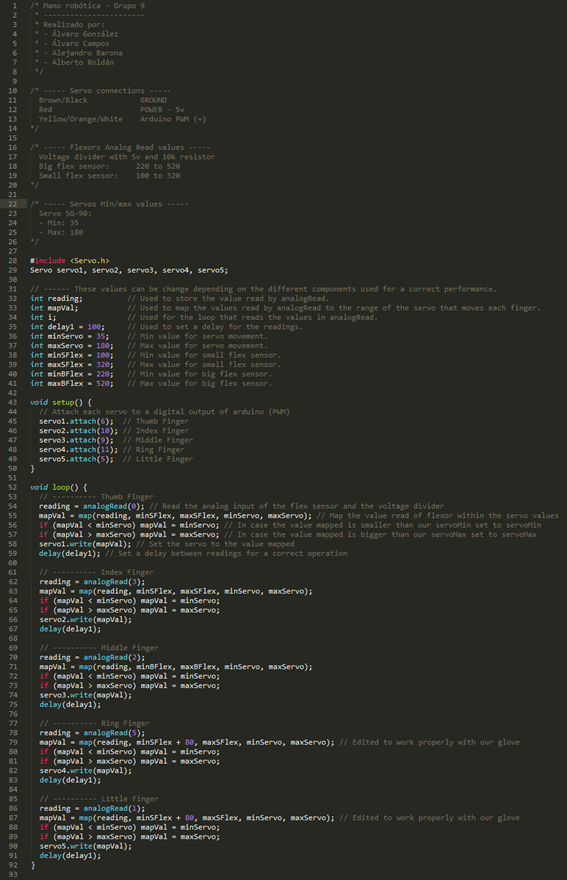
Código
8. Vídeo:
9. Enlace a los documentos: