Nevera Robot

Introducción
Este proyecto ha sido desarrollado por el grupo 13, formado por los alumnos Hugo García Castanedo, Adrián Humia García, Laura Sánchez Muñoz y Óscar Utrilla Mora. El proyecto consiste en una nevera portátil controlable mediante una aplicación móvil. La idea surgió a raíz de la visita a un blog en el que se explicaba cómo se había desarrollado una nevera que seguía a un individuo en función de las coordenadas pasadas a través de un módulo bluetooth (referencia al blog: https://programarfacil.com/podcast/nevera-arduino-perrito-faldero/).
El funcionamiento de nuestro proyecto es muy similar al que se presenta en este blog, pero nuestra implementación incluye algunas mejoras respecto al otro. En primer lugar, en vez de transmitir coordenadas, damos la posibilidad al usuario de controlar directamente el movimiento de la nevera. En segundo lugar, incluimos un sensor de temperatura que nos permite mostrar la temperatura interior de la nevera a través de un anillo de 12 LEDs colocado en el exterior del chasis. Por último, también se incluye una balanza para mostrar el peso de la nevera en todo momento (también a través de un anillo de 12 LEDs).
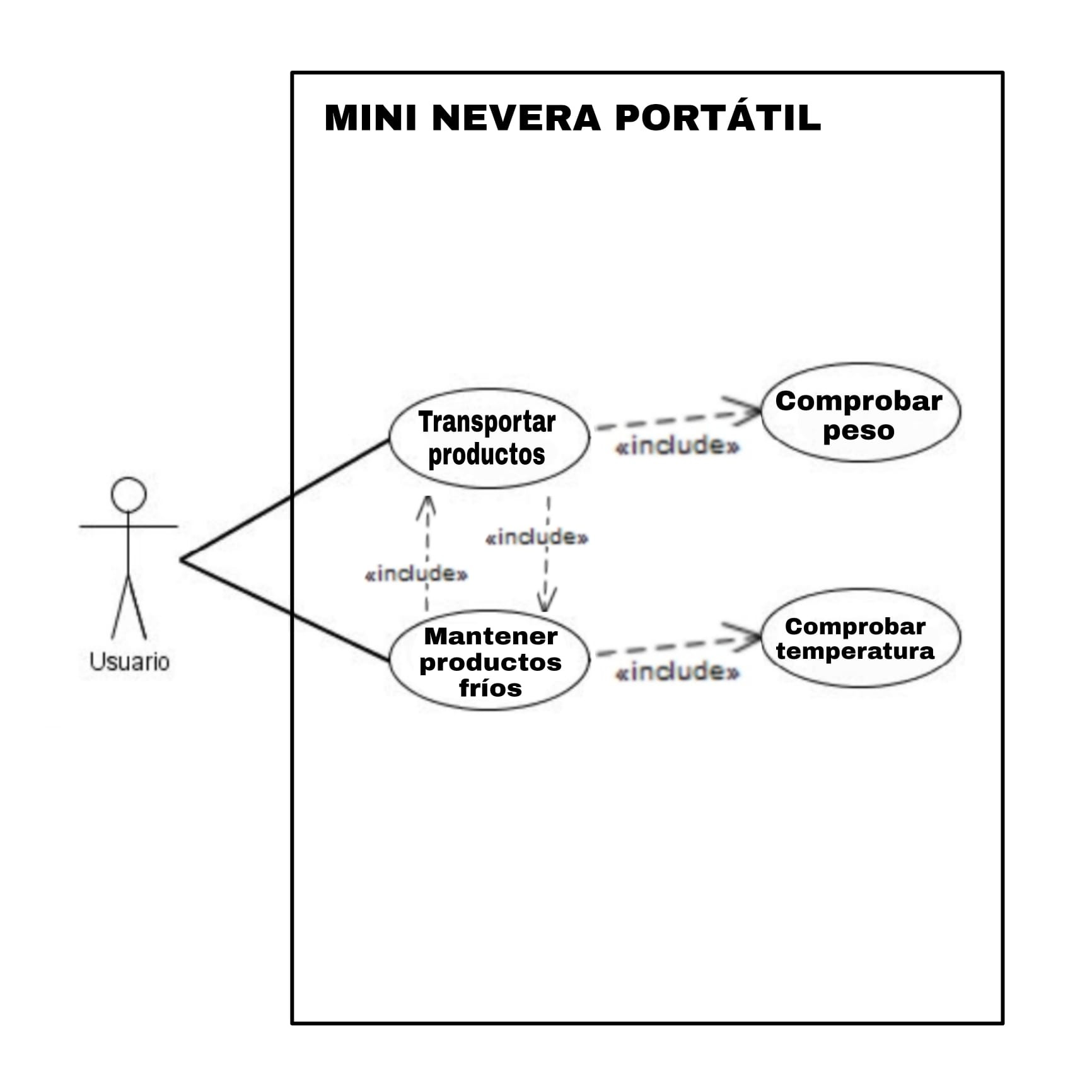
Su utilidad viene determinada por el siguiente diagrama de casos de uso:
Componentes Utilizados
| Placa Arduino uno | 1 | Proporcionado por la universidad |
| Protoboard | 1 | En propiedad del grupo |
| Tornillos y Tuercas | Varias unidades | En propiedad del grupo |
| Pilas AA 1.5V | 8 | 1.60€ |
| Porta pilas 4 pilas AA | 1 | 5.20€ |
| Chasis de plástico | 1 | En propiedad del grupo |
| Interruptor | 1 | 3.50€ |
| Ruedas y motores reductores para coche | 2 ruedas 2 motores | 9.90€ |
| Controlador de movimiento L298N | 1 | 7.99€ |
| Rueda giratoria | 1 | 1.57€ |
| Báscula HX711 con conversor analógico digital | 1 | 7.99€ |
| Sensor de temperatura y humedad DHT11 | 1 | 6.29€ |
| Anillos RGB LED de 12 Diodos cada uno | 2 | 8.66€ |
| Módulo bluetooth HC-05 | 1 | 8.45€ |
| Coste Total | 65.85€ |
Porta pilas 
Interruptor 
Motores 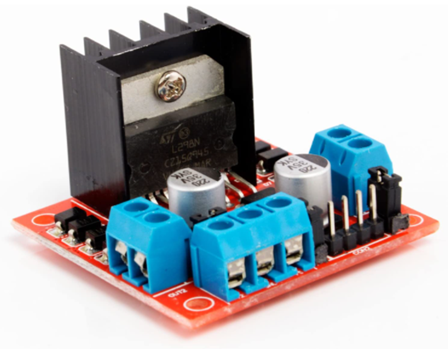
L298N 
Ruedas 
Rueda giratoria 
HC-05 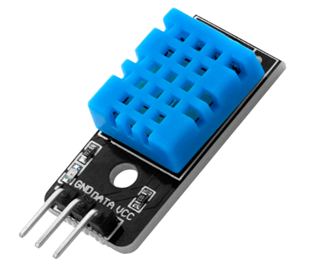
DHT11 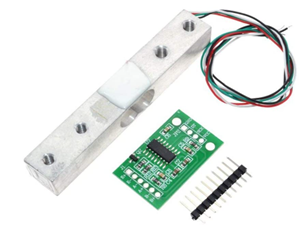
HX711 
LEDs 
Chasis
Esquemas de montaje
En este apartado indicamos los esquemas de montaje de las partes más complicadas, ya que, algunas como la conexión del módulo DHT11 no son muy complejas
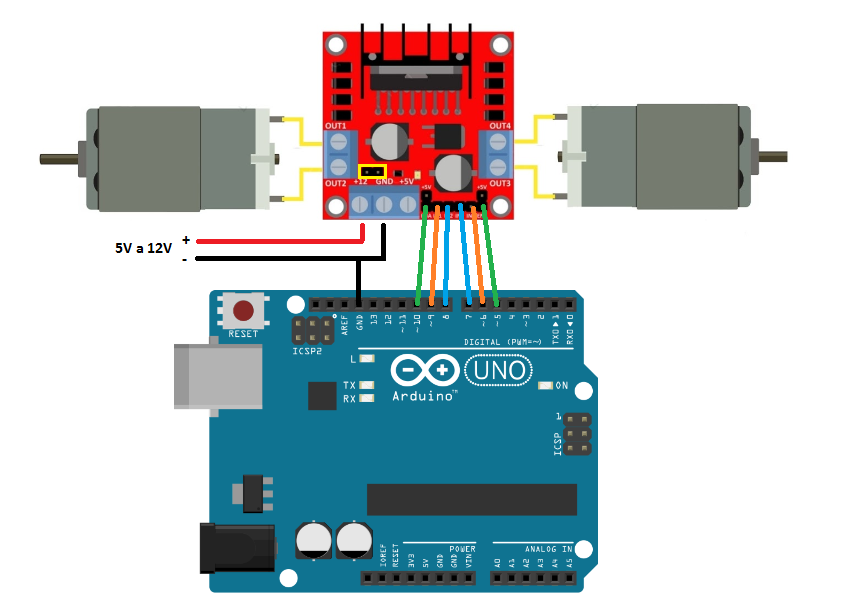
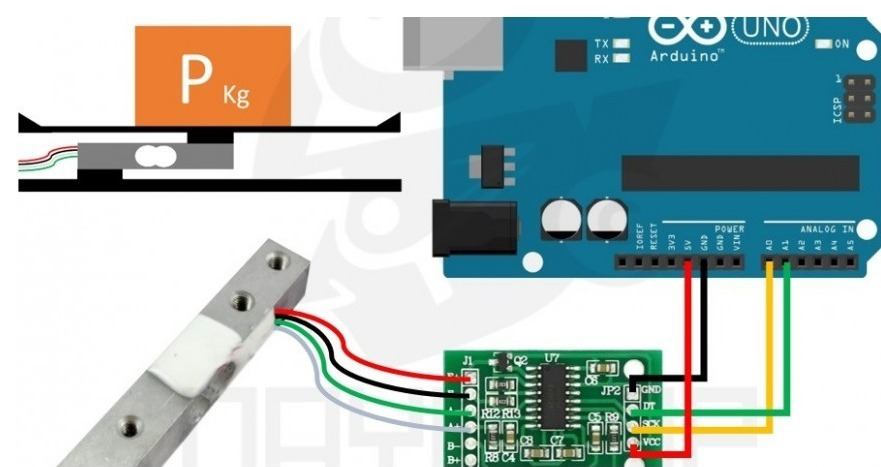
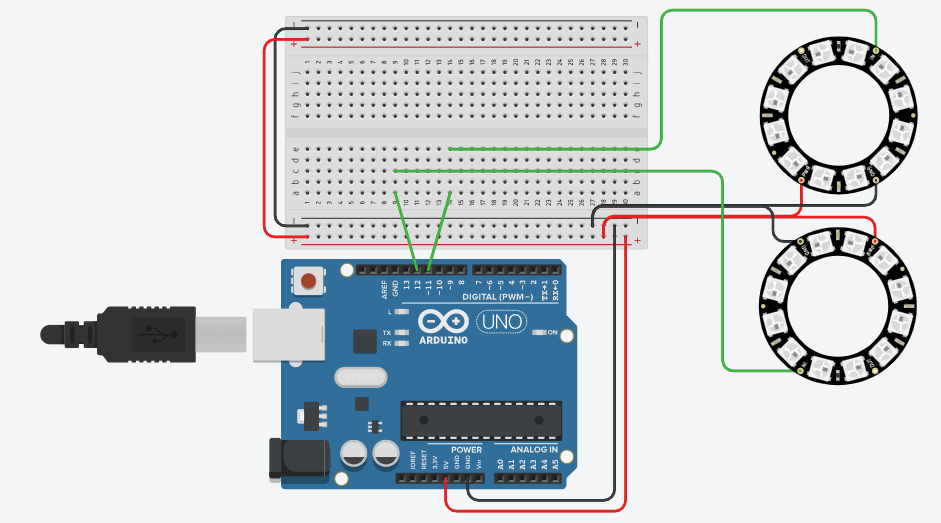
A la hora de montar todos los componentes, necesitamos usar una protoboard externa para poder conectar varios dispositivos, tanto al pin de 5V, como al de tierra del Arduino.
Problemas y Soluciones
Problema 1: Colocamos de forma errónea los cables del sensor de temperatura, provocando que se estropeara. Esto se debió a la gran similitud entre varios modelos de sensor de temperatura. Al final, tuvimos que comprar uno nuevo.
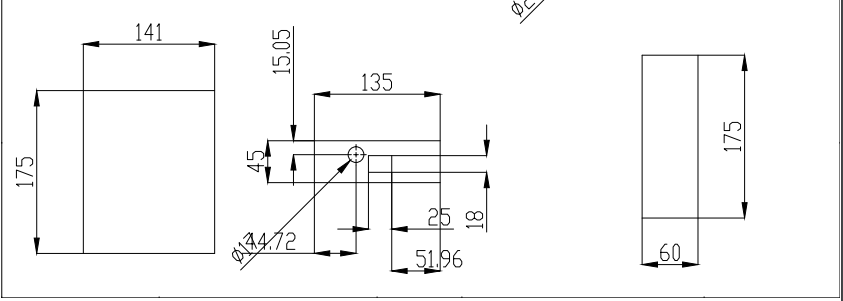
Problema 2: La báscula mide el peso únicamente en el extremo en vez de en la totalidad de su superficie. Debido a esta forma de funcionar de la báscula, tuvimos que ingeniárnoslas para conseguir medir el peso creando esta estructura.

Problema 3: Algunos componentes requerían ser soldados y las soldaduras tenían que ser muy precisas para evitar cortocircuitos.
Video Demostración
Código en Arduino
#include <SoftwareSerial.h>
#include <Adafruit_NeoPixel.h>
#include <elapsedMillis.h>
#include "HX711.h"
#include "DHT.h"
#define PIN_TEMP 11 // PIN del led de la temperatura
#define PIN_PESO 12 // PIN del led de la balanza
//#define PIN_SENSOR_TEMP 13 // PIN del entrada de la temperatura
#define NUMPIXELS 12 // Numero de Diodos del led
#define T_MAX 12 // TEMPERATURA MAXIMA EN GRADOS CELSIUS
#define T_MIN 0
#define P_MAX 1.0 // PESO MAXIMO EN KG
#define P_MIN 0
SoftwareSerial miBT(2, 3); //Instancia la conexion al bluetooth - PIN 2 a TX y PIN 3 a RX
Adafruit_NeoPixel led_temperatura = Adafruit_NeoPixel(NUMPIXELS, PIN_TEMP, NEO_GRB + NEO_KHZ800); // Led de la temperatura
Adafruit_NeoPixel led_balanza = Adafruit_NeoPixel(NUMPIXELS, PIN_PESO, NEO_GRB + NEO_KHZ800); // Led de la balanza
HX711 balanza; // Balanza
//DHT sensor_temperatura(PIN_SENSOR_TEMP, DHT11); // Sensor DHT11
elapsedMillis tiempoPasadoTemperatura;
elapsedMillis tiempoPasadoBalanza;
int temp = 6; // Inicializamos la temperatura a 6 grados
const int DOUT=A1; // CONSTANTE DE LA BALANZA
const int CLK=A0; // CONSTANTE DE LA BALANZA
//Entrada de los motores
int motor1A = 5; // INPUT 1
int motor1B = 6; // INPUT 2
int motor2A = 10; // INPUT 3
int motor2B = 9; // INPUT 4
// Dato recibido atraves de la aplicacion movil
char data = 'S';
void setup()
{
//Definimos las salidas del arduino
pinMode(motor1A , OUTPUT);
pinMode(motor1B , OUTPUT);
pinMode(motor2A , OUTPUT);
pinMode(motor2B , OUTPUT);
Serial.begin(9600); //Inicia la comunicación en el monitor serial a 9600 Baudios
miBT.begin(9600); // inicialmente la comunicacion serial a 9600 Baudios (velocidad de convencional)
// Inicializamos los sensores y leds
inicializarTemperatura();
inicializarBalanza();
//sensor_temperatura.begin();
Serial.println("Módulo conectado");
}
void loop()
{
//Esperamos hasta que haya un Stream de datos
if(miBT.available() > 0){
data = miBT.read();
Serial.println(data);
}
if(data != 'S'){
switch (data) {
case 'F':
avanzar(); // Forward | AVANZAR
break;
case 'B':
retroceder(); // Backward | RETROCEDER
break;
case 'L':
izquierda(); //Left | IZQUIERDA
break;
case 'R':
derecha(); //Right | DERECHA
break;
case 'G':
avanceIzq(); //Stop | Avance Izq
break;
case 'I':
avanceDrcha(); //Stop | Avance Drcha
break;
case 'H':
atrasIzq(); //Stop | Atras Izq
break;
case 'J':
atrasDrcha(); //Stop | Atras Drcha
break;
}
tiempoPasadoBalanza = 0;
}
else{
detener(); //Stop | DETENER
if(tiempoPasadoTemperatura > 1500){ //Actualizamos la temperatura de la nevera cada 1'5 segundos
actualizarTemperatura();
tiempoPasadoTemperatura = 0;
}
if(tiempoPasadoBalanza > 4500){ // Si el coche no se ha movido durante 4'5 segundos, se actualiza la balanza
actualizarPeso();
tiempoPasadoBalanza = 0;
}
}
delay(20);
}
void avanzar(){
// Forward | AVANZAR
digitalWrite(motor1A, HIGH);
//digitalWrite(motor1B, LOW);
digitalWrite(motor2A, HIGH);
//digitalWrite(motor2B, LOW);
}
void retroceder(){
// Backward | RETROCEDER
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, HIGH);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, HIGH);
}
void derecha(){
//Right | DERECHA
digitalWrite(motor1A, HIGH);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, HIGH);
}
void izquierda(){
//Left | IZQUIERDA
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, HIGH);
digitalWrite(motor2A, HIGH);
digitalWrite(motor2B, LOW);
}
void detener(){
//Stop | DETENER
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, LOW);
}
void avanceIzq(){
//Stop | avance Izq
digitalWrite(motor1A, 100);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, HIGH);
digitalWrite(motor2B, LOW);
}
void avanceDrcha(){
//Stop | avance Drcha
digitalWrite(motor1A, HIGH);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, 100);
digitalWrite(motor2B, LOW);
}
void atrasIzq(){
//Stop | atras Izq
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, HIGH);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, 100);
}
void atrasDrcha(){
//Stop | atras Drcha
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, 100);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, HIGH);
}
//CODIGO DEL CONTROL DE LA TEMPERATURA//
void inicializarTemperatura(){
led_temperatura.begin(); //Encendemos el led de la temperatura. Habra que encender tambien el de la balanza
led_temperatura.setBrightness(10); // Predeterminado a 50, pero es mucho
ajustarColoresTemperatura(6); // Inicializamos el led
}
int obtenerTemperatura(){
// Leer la temperatura conlleva unos 250 milisegundos
//float temp = sensor_temperatura.readHumidity();
if(temp == T_MAX){
temp--;
return temp;
}
else if(temp== T_MIN){
temp++;
return temp;
}
else if((int)random(0,2) == 0){
temp--;
return temp;
}else{
temp++;
return temp;
}
}
void actualizarTemperatura(){
switch(obtenerTemperatura()){
case 0:
ajustarColoresTemperatura(12);
break;
case 1:
ajustarColoresTemperatura(11);
break;
case 2:
ajustarColoresTemperatura(10);
break;
case 3:
ajustarColoresTemperatura(9);
break;
case 4:
ajustarColoresTemperatura(8);
break;
case 5:
ajustarColoresTemperatura(7);
break;
case 6:
ajustarColoresTemperatura(6);
break;
case 7:
ajustarColoresTemperatura(5);
break;
case 8:
ajustarColoresTemperatura(4);
break;
case 9:
ajustarColoresTemperatura(3);
break;
case 10:
ajustarColoresTemperatura(2);
break;
case 11:
ajustarColoresTemperatura(1);
break;
case 12:
ajustarColoresTemperatura(0);
}
}
void ajustarColoresTemperatura(int numPixeles){
for(int i = 0; i < numPixeles; i++){
led_temperatura.setPixelColor(i, led_temperatura.Color(0, 0, 255));
}
for(int i = numPixeles; i < NUMPIXELS; i++){
led_temperatura.setPixelColor(i, led_temperatura.Color(255, 0, 0));
}
led_temperatura.show(); // Actualiza el led para que coincida con el valor de la temperatura
}
// CODIGO DE LA BALANZA //
void inicializarBalanza(){
balanza.begin(DOUT, CLK);
Serial.print("Lectura del valor del ADC: ");
Serial.println(balanza.read());
Serial.println("No ponga ningun objeto sobre la balanza");
Serial.println("Destarando...");
Serial.println("...");
balanza.set_scale(439430.25); // Establecemos la escala
balanza.tare(20); //El peso actual es considerado Tara
led_balanza.begin(); //Encendemos el led de la temperatura. Habra que encender tambien el de la balanza
led_balanza.setBrightness(5); // Predeterminado a 50, pero es excesivo
ajustarColoresBalanza(0); // Inicializamos el led a Blanco
Serial.println("Listo para pesar");
}
float medirPeso(){
return balanza.get_units(20);
}
void actualizarPeso(){
float peso = medirPeso();
Serial.println(peso);
if((0 * 0.0833) < peso < (0.0833))
ajustarColoresBalanza(1);
else if((0.0833) <= peso <= (2*0.0833))
ajustarColoresBalanza(2);
else if((2*0.0833) <= peso <= (3*0.0833))
ajustarColoresBalanza(3);
else if((3*0.0833) <= peso <= (4*0.0833))
ajustarColoresBalanza(4);
else if((4*0.0833) <= peso <= (5*0.0833))
ajustarColoresBalanza(5);
else if((5*0.0833) <= peso <= (6*0.0833))
ajustarColoresBalanza(6);
else if((6*0.0833) <= peso <= (7*0.0833))
ajustarColoresBalanza(7);
else if((7*0.0833) <= peso <= (8*0.0833))
ajustarColoresBalanza(8);
else if((8*0.0833) <= peso <= (9*0.0833))
ajustarColoresBalanza(9);
else if((9*0.0833) <= peso <= (10*0.0833))
ajustarColoresBalanza(10);
else if((10*0.0833) <= peso <= (11*0.0833))
ajustarColoresBalanza(11);
else if(peso >= (12*0.0833))
ajustarColoresBalanza(12);
else
ajustarColoresBalanza(0);
}
void ajustarColoresBalanza(int numPixeles){
int i = 0;
for(i; i < numPixeles; i++){
if(i <= 5)
led_balanza.setPixelColor(i, led_balanza.Color(0, 255, 0)); // VERDE
else if(i <= 9)
led_balanza.setPixelColor(i, led_balanza.Color(255, 255, 0)); // AMARILLO
else
led_balanza.setPixelColor(i, led_balanza.Color(255, 0, 0)); // ROJO
}
for(i; i < NUMPIXELS; i++)
led_balanza.setPixelColor(i, led_balanza.Color(255, 255, 255)); // BLANCO
led_balanza.show(); // Actualiza el led para que coincida con el valor de la temperatura
}