Petcar
1. Introducción
1.1. Grupo e integrantes
El proyecto ha sido realizado por el grupo 19, cuyos integrantes son: Arturo Marzán Domingo, y Miguel Serralta Jamard.
1.2. Presentación del proyecto
Este proyecto en principio fue pensado para realizar un coche que se manejase bien mediante bluetooth, o bien que fuese un coche autónomo y se manejase solo mediante sensores de proximidad. No obstante, debido al hecho de que uno de los integrantes del grupo tiene una mascota que no se puede mover por culpa de una enfermedad, nos surgió la idea de realizar un coche manejado por bluetooth, donde poder poner a la mascota y poder sacarla a dar paseos.
El coche cuenta con cuatro ruedas equilibradas, y con una tablón encima del coche, donde poder poner una cama, o a la mascota directamente.
1.3. Materiales
*Placa de Arduino Mega x1
*Placa motor shield v1 x1
*Módulo bluetooth HC-06 x1
*Chasis x2
*Ruedas x4
*Motores de 3 a 6 voltios x4
*Portapilas de 4 x1
*Batería x1
*Cables de puente macho hembra x12
*Tornillos y tuercas
*Tablón de madera x1
Todo ello hace un total de 60-65 € aproximadamente
2. Desarrollo del proyecto
2.1. Construcción y montaje

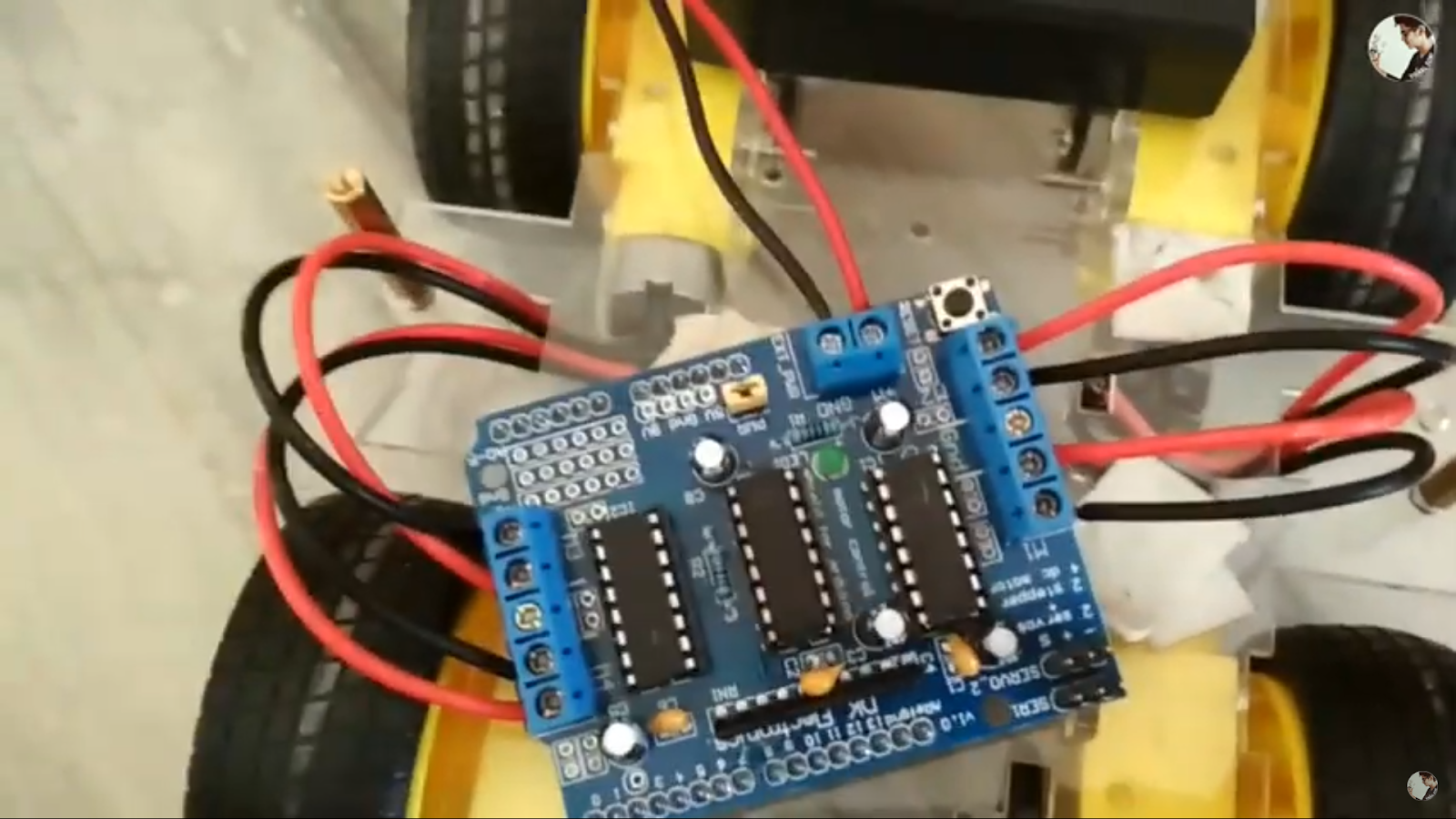
El proceso de construcción lo hemos dividido en fases: Lo primero fue colocar las ruedas con sus respectivos motores y esto colocarlo a la placa, sujetarlo mediante tornillos e ir a la siguiente fase.

La siguiente fase tratará de conectar los motores de las ruedas a la placa arduino shield v1, en concreto a la motores de la placa que alimentaran las ruedas. Para realizar esto, es necesario en cada motor de la rueda poner dos cables, y estos conectarlos a los motores de la placa. Es muy importante el orden de los cables, ya que colocarlos al revés significaría cambiar el sentido del giro de la rueda.
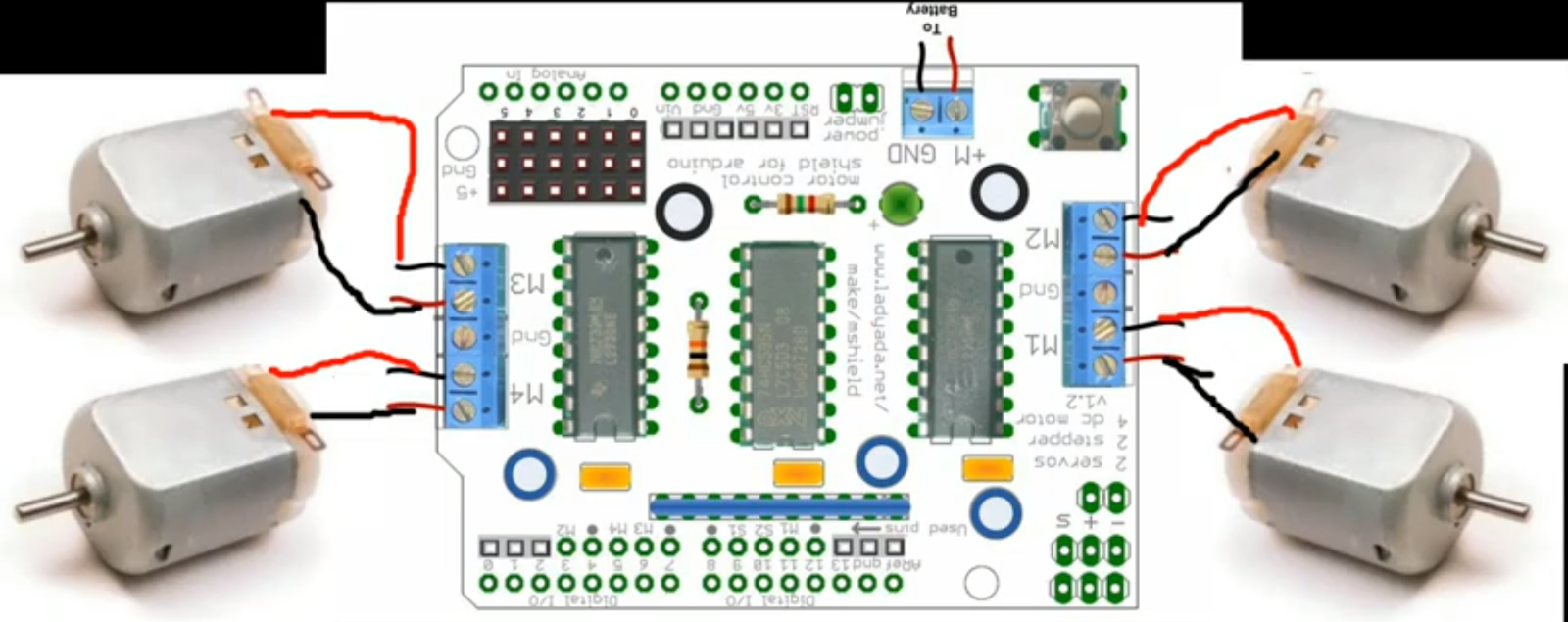
Tras todo ello lo que deberíamos hacer sería cargar el código en la placa de Arduino Mega, y conectarla por los puntos concretos, es decir, que todos los pines cuadrasen, con la placa shield. Tras ello lo que haremos, será conectar el módulo HC-06 a los pines correspondientes. El positivo ira al servo positivo de la placa shield, y el negativo al negativo, el pin rx irá al tx y viceversa entre el módulo y la placa Mega. Una vez hecho todo eso, lo posterior será organizar los cables para que no se enreden, tras ello conectaremos las placas a una batería y a pilas.

2.2. Código
#include <AFMotor.h>
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
char bt=’S’;
void setup()
{
Serial.begin(9600);
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
Stop();
}
void loop() {
bt=Serial.read();
if(bt==’F’)
{
forward();
}
if(bt==’B’)
{
backward();
}
if(bt==’L’)
{
left();
}
if(bt==’R’)
{
right();
}
if(bt==’G’)
{
Fright();
}
if(bt==’I’)
{
Fleft();
}
if(bt==’H’)
{
Bleft();
}
if(bt==’J’)
{
Bright();
}
if(bt==’S’)
{
Stop();
}
}
void forward()
{
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void backward()
{
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}
void left()
{
motor1.run(FORWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(FORWARD);
}
void right()
{
motor1.run(BACKWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(BACKWARD);
}
void Fright()
{
motor1.run(RELEASE);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(RELEASE);
}
void Fleft()
{
motor1.run(FORWARD);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(FORWARD);
}
void Bright()
{
motor1.run(RELEASE);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(RELEASE);
}
void Bleft()
{
motor1.run(BACKWARD);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(BACKWARD);
}
void Stop()
{
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
}
3. Problemas encontrados
Lo principal fue calibrar bien las ruedas y el giro para que fuese lo más preciso posible. También darle la máxima potencia posible, y calibrar bien las ruedas y las placas para que aguantase más peso.
Debido a que se trata de la alimentación de 4 motores más la placa Mega, al principio contábamos con problemas, ya que la potencia no fue suficiente, y se paraba, o alguna rueda dejaba de funcionar; para ello fuimos subiendo el voltaje, no obstante, no hubo resultado alguno. Tras ello, lo que hicimos fue poner la batería final, con un amperaje mayor, y de este modo conseguimos que funcionase.
4. Posibles mejoras
*Ruedas más grandes y gruesas que aguanten mayor peso.
* Motos con mayor potencia para mover más peso.
* Tamaño más grande para mover mascotas de tamaño superior.
* Añadir luces y sonido.
* Mejorar las distancia remota.
