Picassino

Descripción
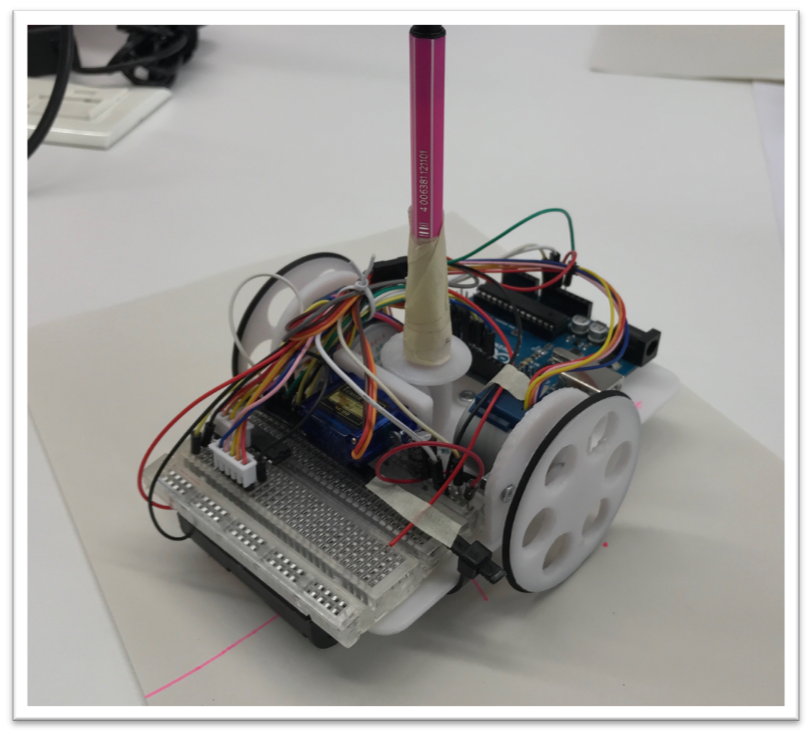
El Picassino es un robot basado
en Arduino capaz de dibujar a partir de líneas rectas cualquier tipo de dibujo.
Esto es posible gracias a sus dos motores laterales para darle movimiento y un
tercer servomotor que pega o despega el rotulador de la hoja. El chasis está completamente
fabricado a partir de impresión 3D.
en Arduino capaz de dibujar a partir de líneas rectas cualquier tipo de dibujo.
Esto es posible gracias a sus dos motores laterales para darle movimiento y un
tercer servomotor que pega o despega el rotulador de la hoja. El chasis está completamente
fabricado a partir de impresión 3D.
Materiales
Los
materiales empleados para su construcción son los siguientes:
materiales empleados para su construcción son los siguientes:
·
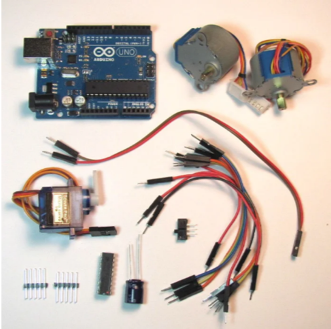
Arduino Uno
Arduino Uno
·
Dos motores paso a paso
Dos motores paso a paso
·
Cables y pines de interconexión
Cables y pines de interconexión
·
Un servomotor
Un servomotor
·
Condensador
Condensador
·
Microcontrolador ULN2803
Microcontrolador ULN2803
·
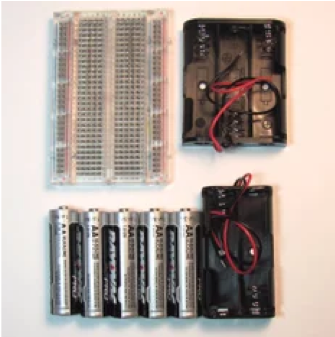
Protoboard
Protoboard
·
Bahía para baterías AA x4
Bahía para baterías AA x4
·
Tornillos y tuercas
Tornillos y tuercas
·
Gomas antideslizantes
Gomas antideslizantes
·
Chasis impreso en 3D
Chasis impreso en 3D


Circuito completo

Código
El código que hemos utilizado presenta varios métodos para
las acciones que realiza el robot, así como moverse hacia delante, hacia
detrás, girar, bajar el rotulador,etc. Los métodos comentados son los
siguientes:
las acciones que realiza el robot, así como moverse hacia delante, hacia
detrás, girar, bajar el rotulador,etc. Los métodos comentados son los
siguientes:






Creatividad
Aparte del código comentado anteriormente, se nos ocurrió la
idea de, a partir de crear una serie de figuras, asignar unas funciones
aleatorias al robot pintor, de manera que se moviese por el papel hacia
diferentes zonas pintando distintas figuras y creando cuadros únicos al del
azar. De esta forma, se podría decir que picassino pinta por él mismo, sin
ningún dibujo predeterminado en su código, concediéndole cierta libertad
creativa. Los resultados fueron cuadros creados a partir de líneas y figuras
simples como círculos y cuadrados que podríamos clasificas como arte abstracto.
idea de, a partir de crear una serie de figuras, asignar unas funciones
aleatorias al robot pintor, de manera que se moviese por el papel hacia
diferentes zonas pintando distintas figuras y creando cuadros únicos al del
azar. De esta forma, se podría decir que picassino pinta por él mismo, sin
ningún dibujo predeterminado en su código, concediéndole cierta libertad
creativa. Los resultados fueron cuadros creados a partir de líneas y figuras
simples como círculos y cuadrados que podríamos clasificas como arte abstracto.
Problemas encontrados
La realización del proyecto, que aunque, el precio total del
robot haya sido muy económico y parezca un robot pequeño y simple, no ha sido
para nada tarea fácil como veremos ahora:
robot haya sido muy económico y parezca un robot pequeño y simple, no ha sido
para nada tarea fácil como veremos ahora:
1.
En primer lugar, el material utilizado para
hacer la base, las ruedas, los apoyos, etc. ha sido impreso con una impresora
3d perteneciente a un integrante del grupo. Al generar cantidad de piezas
pequeñas, hemos tenido bastantes problemas al no imprimirse en la justa medida
o romperse con facilidad, teniendo que volver a imprimir varias piezas o buscar
soluciones con otros materiales.
En primer lugar, el material utilizado para
hacer la base, las ruedas, los apoyos, etc. ha sido impreso con una impresora
3d perteneciente a un integrante del grupo. Al generar cantidad de piezas
pequeñas, hemos tenido bastantes problemas al no imprimirse en la justa medida
o romperse con facilidad, teniendo que volver a imprimir varias piezas o buscar
soluciones con otros materiales.
2.
En segundo lugar, hemos encontrado dificultades
en calibrar el robot en base al código arduino. A base de prueba y error y
medir la longitud de las piezas, así como las ruedas y analizar el funcionamiento
hemos ido cambiando los valores para que se ajustase a la distancia exacta que
tendría que recorrer.
En segundo lugar, hemos encontrado dificultades
en calibrar el robot en base al código arduino. A base de prueba y error y
medir la longitud de las piezas, así como las ruedas y analizar el funcionamiento
hemos ido cambiando los valores para que se ajustase a la distancia exacta que
tendría que recorrer.
3.
También en cuanto al código, la realización de
diferentes figuras geométricas, así como letras nos ha llevado bastante tiempo
al ajustar con precisión cada movimiento del robot.
También en cuanto al código, la realización de
diferentes figuras geométricas, así como letras nos ha llevado bastante tiempo
al ajustar con precisión cada movimiento del robot.
4.
Por último, hemos tenido cierto problema con las
pilas, ya que, intentamos adaptar el proyecto con los recursos prestados en
clase e iba un poco escaso de potencia.
Por último, hemos tenido cierto problema con las
pilas, ya que, intentamos adaptar el proyecto con los recursos prestados en
clase e iba un poco escaso de potencia.
Posibles mejoras
1. Debido
a fallos en la impresión 3D, las ruedas tienen holguras.
a fallos en la impresión 3D, las ruedas tienen holguras.
2. Añadir
más voltaje para mayor velocidad ya que se mueve muy lento.
más voltaje para mayor velocidad ya que se mueve muy lento.
3. El
rotulador es muy fino para el soporte y al hacer giros se mueve, dejando
imprecisiones en el dibujo final.
rotulador es muy fino para el soporte y al hacer giros se mueve, dejando
imprecisiones en el dibujo final.
4. Un
sensor de infrarrojos para detectar obstáculos.
sensor de infrarrojos para detectar obstáculos.


{kind=link}