Plataforma para maleta GPS-Bluetooth
1. INTRODUCCIÓN
1.1. Grupo e integrantes
El proyecto de la plataforma para maletas GPS-Bluetooth ha sido realizado por el grupo 5 del campus de Móstoles. Los integrantes del grupo son:
- Ana Martínez Montañez
- Francisco Robles Castro
- Daniel Lois Nuevo
1.2. Presentación del proyecto
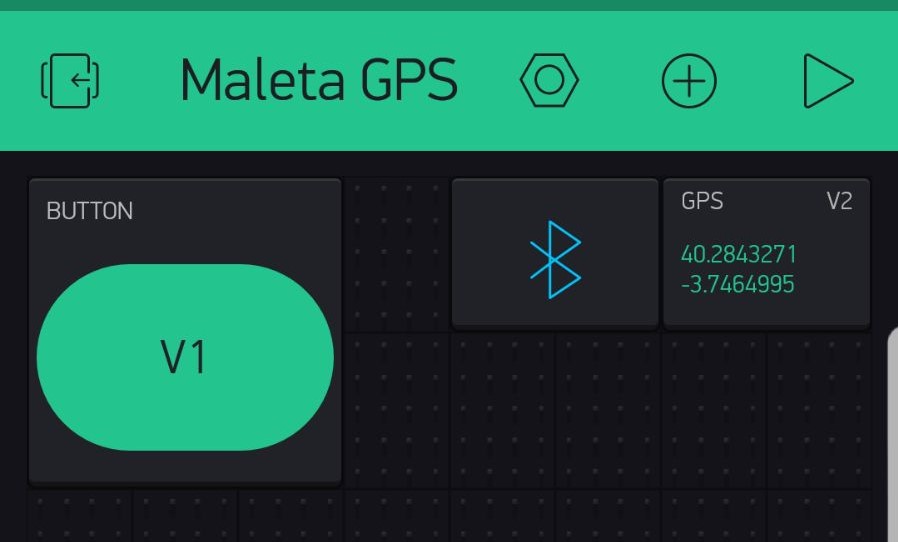
Nuestro proyecto consiste en una plataforma que funciona mediante GPS y Bluetooth (que se conectan a una aplicación móvil) y que trata de facilitar el transporte de maletas para personas con alguna discapacidad o que tengan movilidad reducida. Desde la aplicación móvil se activan tanto los motores como el GPS y Bluetooth del móvil, para que este pueda mandar su posición a sus respectivos módulos de la plataforma, y que esta se mueva según la posición en la que se encuentre la persona.
1.3. Materiales y presupuesto
MATERIALES |
PRECIO (Euros) |
Tornillos |
14.78 |
Ejes Universales (Para robótica) |
8.50 |
2 Ruedas de plástico |
25.00 |
1 Rueda rotatoria |
7.45 |
2 Motores DC de 12V |
47.75 |
1 Batería LiPo 2200mAh 3S 20C |
28.00 |
1 Batería portátil (de móvil es suficiente) 5V |
0.00 (Teníamos) |
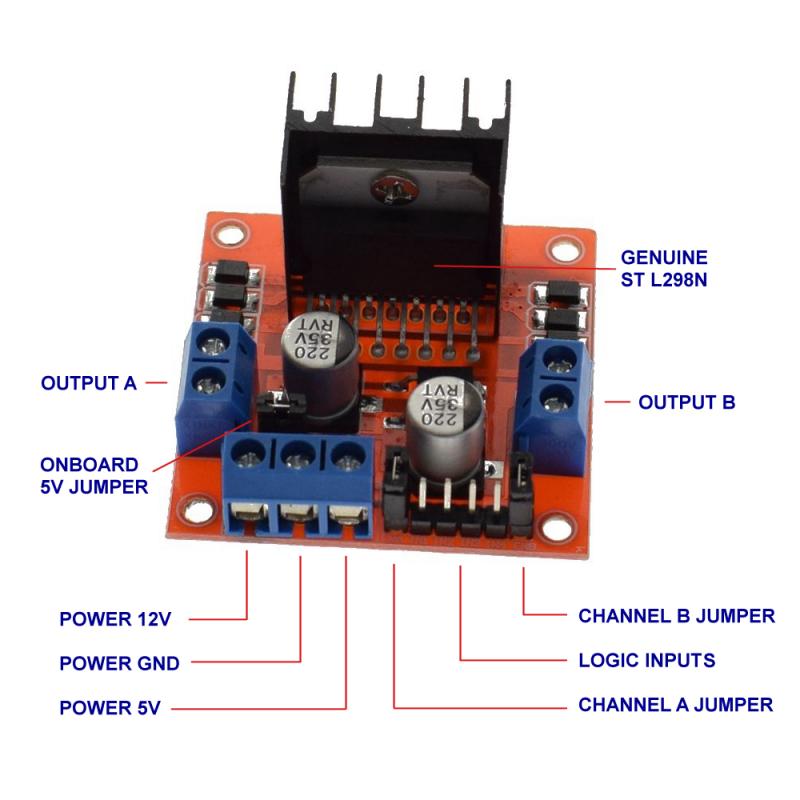
1 Controlador de motor L298n |
6.00 |
1 Placa Arduino |
0.00 (Teníamos) |
1 Módulo GPS NEO-6M |
24.00 |
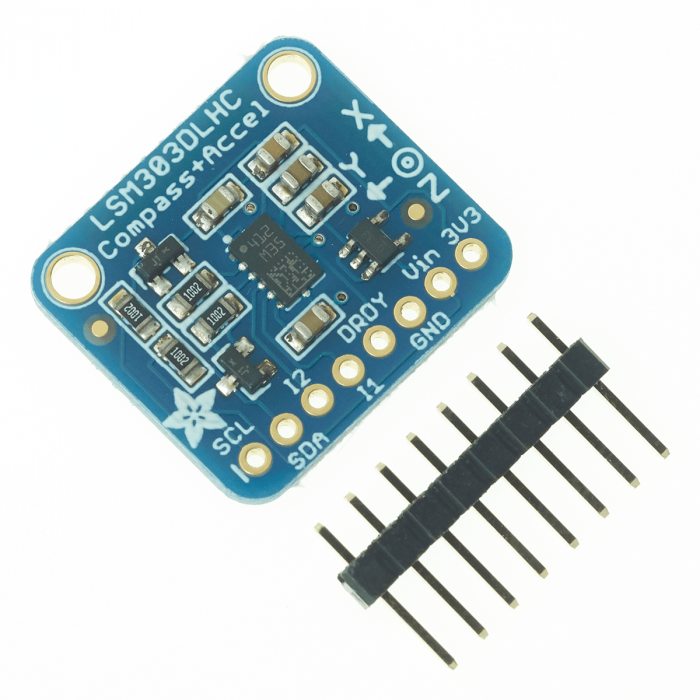
1 Acelerómetro-Magnetómetro (Brújula) LSM303 |
40.20 |
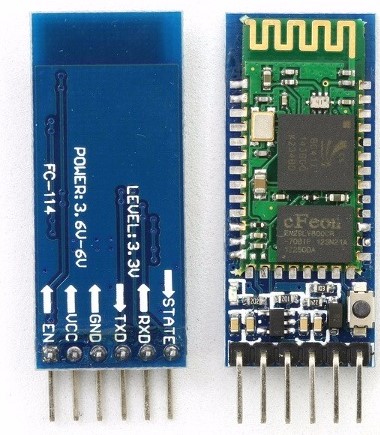
1 Módulo Bluetooth HC-05 |
9.00 |
Tuercas |
2.50 |
Arandelas |
2.50 |
Clavos |
2.00 |
Cables Jumper |
0.00 (Teníamos) |
Cargador IMAX B6 (Para la batería LiPo) |
51.65 |
Velcro para colgar cuadros |
11.35 |
Tablones de madera |
Reciclados de un taller |
TOTAL: |
278.68 |
2. Desarrollo del proyecto
2.1. Construcción
Lo primero que hicimos fue probar que los componentes principales funcionasen y no estuviesen defectuosos. Por ejemplo, para comprobar los motores, usamos dos pilas en serie de 4.5V cada una, y funcionaban bien.
También probamos el compás (brújula) con uno de los muchos sketchs de Arduino que hay en internet para este tipo de módulos, y estuvimos viendo que el norte apuntase al mismo sitio que las brújulas de nuestros móviles. Después probamos el módulo GPS, que necesitaba que estuviésemos cerca de una ventana o al aire libre para que recibiese la señal de los satélites, y la luz de dicho módulo empezase a parpadear indicando que estaba recibiendo correctamente la señal. Una vez hecho esto, fuimos al taller de uno de nuestros padres, ya que al ser una carpintería, tenía herramientas y madera que podíamos reciclar.
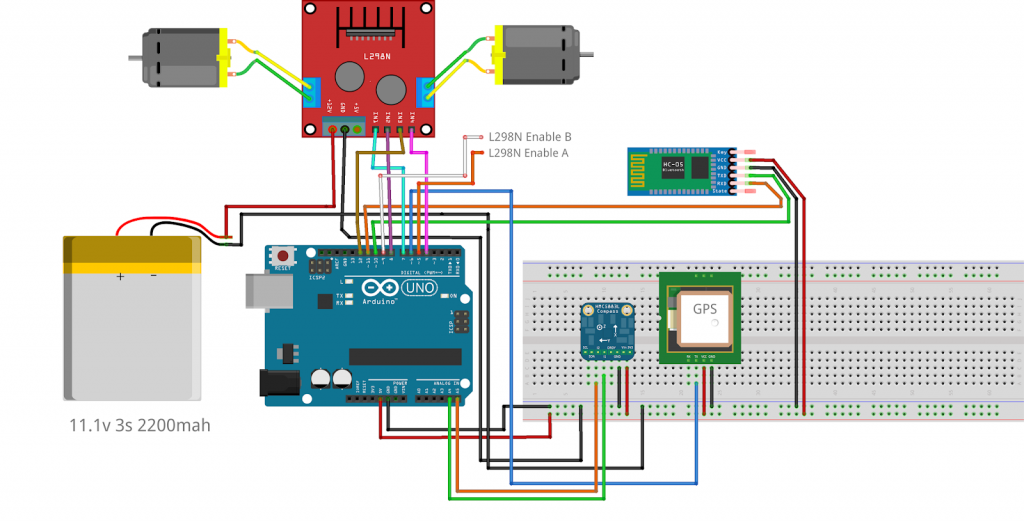
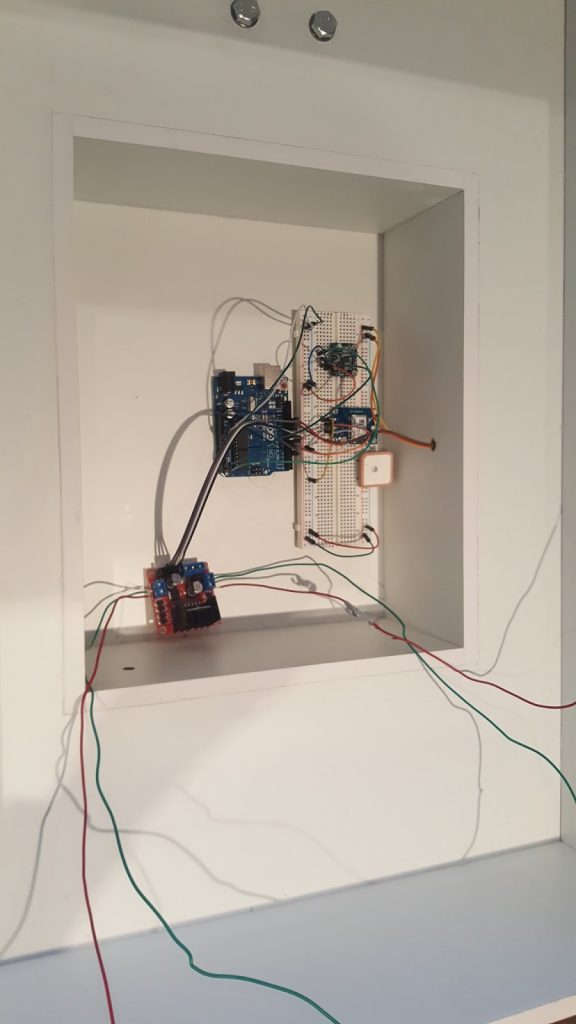
Para hacer la plataforma, usamos madera, clavos, cola y tornillos. Tras tener toda la plataforma, y habiendo hecho un cajón en ella para “esconder” el material electrónico, comenzamos a realizar todas las conexiones con sus respectivos componentes. Hubo piezas que tuvimos que soldar, como por ejemplo la brújula y el módulo GPS, que venían con los pines sueltos. También soldamos los cables que transmiten la electricidad a los motores, para que estos hicieran un buen contacto. Para finalizar, hicimos sucesivas pruebas en las que vimos que tuvimos que cambiar en nuestro código el ángulo de declinación de nuestro GPS para que se calibrase, ya que iba para el lado contrario. Por último, hicimos más pruebas con un resultado satisfactorio.
2.2 Código
Librerías necesarias:
Libreria1
Libreria2
Libreria3
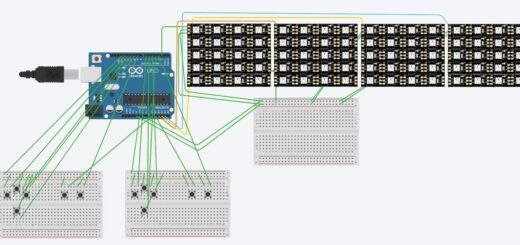
2.3 Esquema
2.4 Fotos










2.5 Problemas encontrados
El módulo de Bluetooth lo tuvimos que poner por fuera del cajón para que tuviese una mejor conexión.
2.6 Posibles mejoras
- Una alarma que se active para cuando la plataforma se aleje del portador de la aplicación a más de una distancia determinada.
- Sensor de peso, para saber si alguien ha quitado la maleta de encima de la plataforma.
- Sensor de proximidad para que cuando se vaya a chocar con algún objeto se pare.
- En vez de usar los soportes de madera para las ruedas, sería mejor imprimir unos en una impresora 3d para que las ruedas queden mejor sujetas y no haga falta usar bridas de plástico.