PROYECTO – FUTBOLINO
FUTBOLINO

GRUPO 8
Aarón Velasco López – GII
Guillermo Ramos Valverde – GII
Jesús Sánchez Álvarez – GII
1. Introducción.
2. Esquemas de conexión.
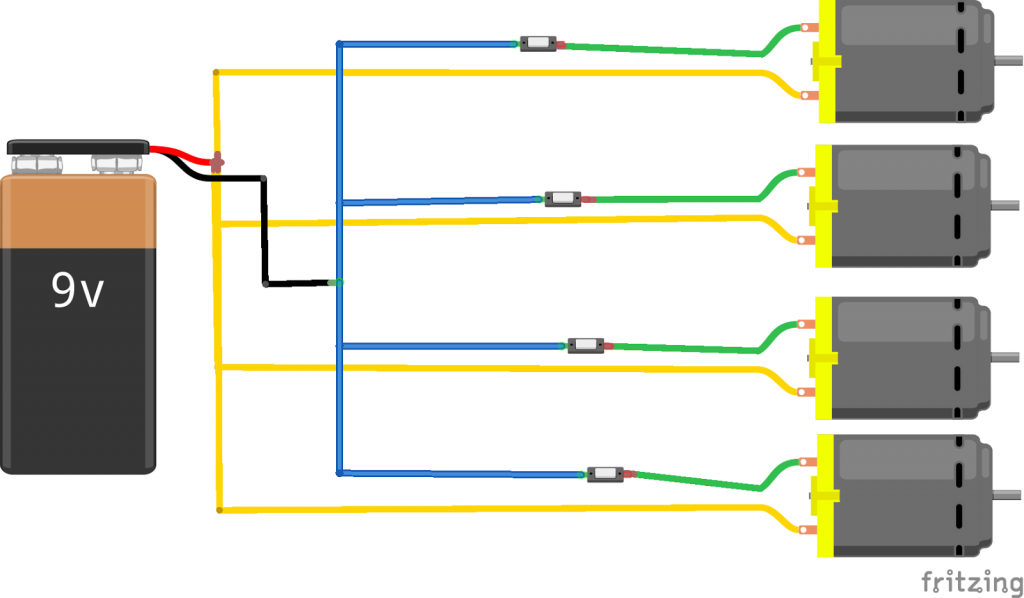
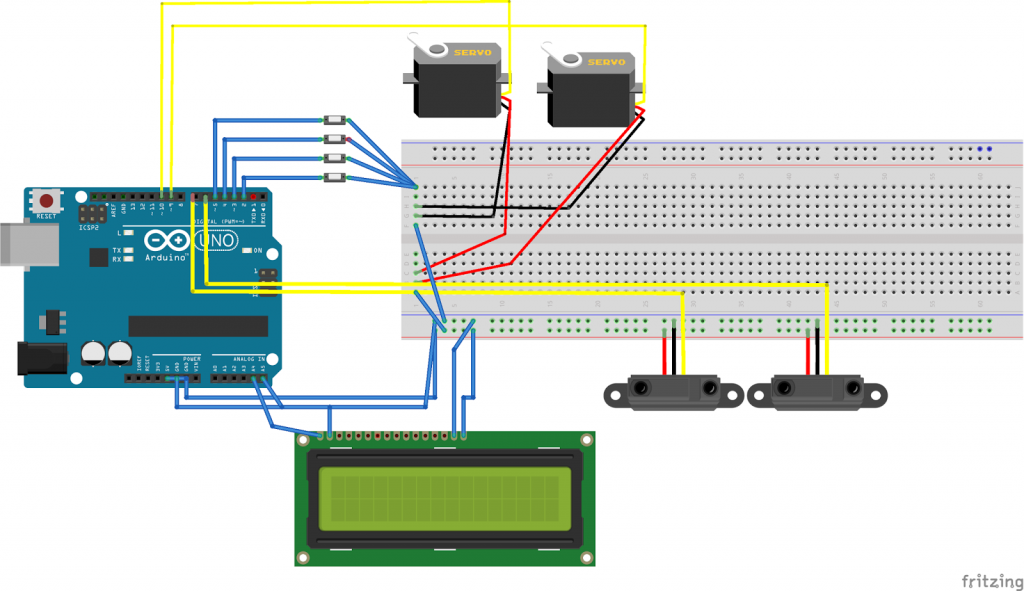
El Futbolino se compone de dos circuitos en paralelo que funcionan de manera independiente. Uno da movimiento a los muñecos del campo y el otro se ocupa de controlar el resto de componentes como los servomotores que mueven los porteros o los sensores infrarrojos que detectan los goles y los suman al marcador en la pantalla LCD.
3. Componentes.
Elemento
Precio unitario
Cantidad
Precio total
Arduino Uno
Proporcionada por el
profesor
1
–
Base Futbolín
19,95 €
1
19,95 €
Interruptores
varios
0,50 €
10
5 €
Servos
7,50 €
2
15 €
LCD 16×2 + I2C
5,90 €
1
5,90 €
Motores CC
6,40 €
5
32 €
Sensores IR 300 mm
2,90 €
2
5,80€
Gomas Elásticas
1 €
1
1 €
Muñecos Futbolín
0,20 €
10
2 €
Baterías 4.5 V
4,95 €
2
9,90 €
TOTAL
96,55€
profesor
varios
4. Funcionamiento básico.
Los jugadores disponen de cuatro interruptores. Con dos de estos interruptores (etiquetados como A y D) se puede manejar a los jugadores del campo en ataque y defensa haciendo girar sus palas, unidas a los motores de corriente continua mediante gomas elásticas a modo de poleas. Con los otros dos interruptores (etiquetados con flechas iquierda y derecha) se puede mover al portero hacia un lado u otro para cubrir los huecos de la portería. Unos sensores infrarrojos situados en el interior de las porterías detectan el paso de la pelota, en cuyo caso actualizan el gol en el marcador, es decir, en la pantalla LCD.
Cuando alguno de los dos jugadores alcance los 10 goles se mostrará un mensaje de victoria del jugador local o visitante respectivamente.
5. Problemas y mejoras.
Interferencias
electromagnéticas:
importante) fue que los motores al girar generan un campo electromagnético que
interfería con Arduino y provocaba que la placa se reiniciase (y con ella todos
los componentes integrados) cada vez que se movían. Resultó bastante frustrante
ya que el circuito de los motores era independiente al de Arduino y tardamos en
darnos cuenta de que la solución se hallaba en alejar la placa unos 30 cm de
los motores.
Servomotores:
de los interruptores asociados a los servos no estaban bien configurados la
placa Arduino leía datos provenientes del entorno y los porteros se movían a
izquierda y derecha de forma aleatoria. Esto se solucionó conectando los
interruptores a tierra y configurando las resistencias internas de los pines
como INPUT_PULLUP.
Sensores
infrarrojos:
eran de gran calidad y esto provocaba que fallasen a menudo. Además la luz
infrarroja a veces no era de suficiente intensidad (lo comprobábamos con la
cámara de un teléfono móvil). Finalmente optamos por reemplazarlos por
pulsadores para aumentar el marcador en el día de la presentación. No obstante
se podía haber solucionado comprando dispositivos de mejor calidad.
Sistema de recogida de pelota:
sistema que devolviera la pelota al campo cuando se produjera un gol. Por
tiempo no se pudo adaptar finalmente. No obstante, se plantea como una posible
mejora para el futuro que se puede implementar de manera relativamente sencilla
con un par de servos.
par de zumbadores o altavoces que reproduzcan sonidos eventuales en caso de gol
o victoria así como leds que se enciendan en tal caso.


{kind=link}