RAMBO, robot aspiradora.(Grupo 10).
RAMBO, Robot
aspirador .
aspirador .
Introducción:
Hemos
realizado un robot aspirador con una placa Arduino que detecta y evita
obstáculos. El robot se enciende conectando el cable al positivo de la pila y
empieza a avanzar hasta que detecta un obstáculo, en ese momento gira para el
lado contrario al obstáculo, si el obstáculo esta justo enfrente de él y a
menos de 20 cm el RAMBO retrocede y gira a la izquierda. Para pararlo hay que quitar
el cable.
realizado un robot aspirador con una placa Arduino que detecta y evita
obstáculos. El robot se enciende conectando el cable al positivo de la pila y
empieza a avanzar hasta que detecta un obstáculo, en ese momento gira para el
lado contrario al obstáculo, si el obstáculo esta justo enfrente de él y a
menos de 20 cm el RAMBO retrocede y gira a la izquierda. Para pararlo hay que quitar
el cable.
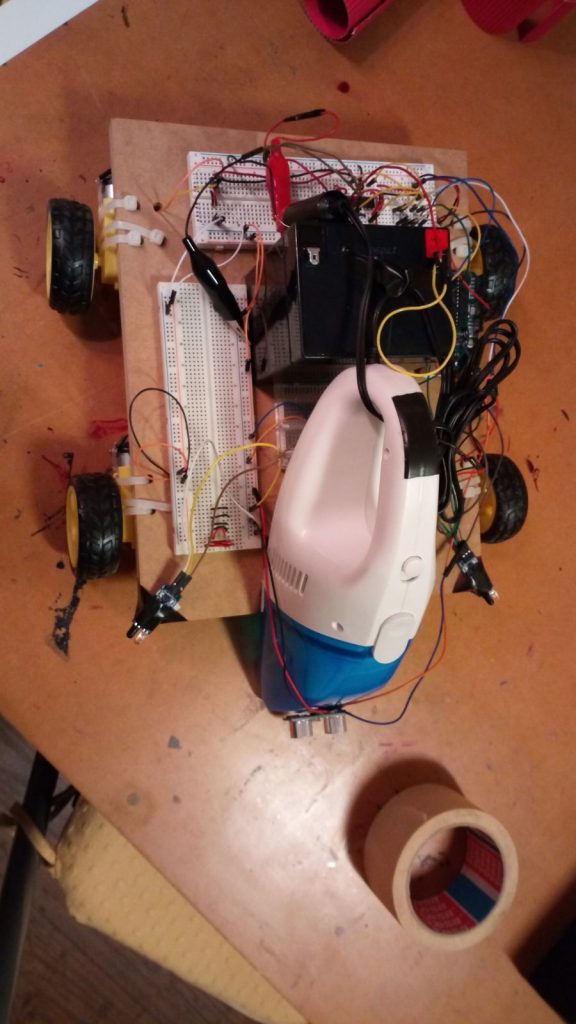
Componentes:
Una placa
Arduino (prestado por el centro).
Arduino (prestado por el centro).
Una protoboard
(hemos usado tres, pero para organizar mejor los cables).
(hemos usado tres, pero para organizar mejor los cables).
Una batería
de 12V y 5 AH. Coste:20 euros.
de 12V y 5 AH. Coste:20 euros.
Una
aspiradora de coche de 12V. Coste:18 euros.
aspiradora de coche de 12V. Coste:18 euros.
Un tablón de
madera de 30.5×24 cm.
madera de 30.5×24 cm.
4 motores de
corriente continua con caja reductora con sus respectivas ruedas. Coste:15
euros.
corriente continua con caja reductora con sus respectivas ruedas. Coste:15
euros.
Un sensor de
ultrasonidos. Coste: 2 euros.
ultrasonidos. Coste: 2 euros.
Dos sensores
de infrarrojos. Coste: 8 euros.
de infrarrojos. Coste: 8 euros.
Un
controlador L293D Motor
Driver IC. Coste: 2
euros.
controlador L293D Motor
Driver IC. Coste: 2
euros.
12 bridas de
plástico.
plástico.
Cinta de
doble cara. (Se va a utilizar una pequeña cantidad).
doble cara. (Se va a utilizar una pequeña cantidad).
Cinta
americana. (Se va a utilizar una pequeña cantidad).
americana. (Se va a utilizar una pequeña cantidad).
Cables.
Coste
aproximado: 65 euros.
aproximado: 65 euros.
Montaje:
Primero cogemos
la tabla y a 8 cm de la esquina cortamos hasta 5 cm hacia el interior de la
tabla, y lo mismo desde la esquina contraria. Después realizamos una serie de
taladros donde se van a colocar los motores (tres por motor y uno opcional para
introducir los cables al motor) para poder introducir las bridas. El siguiente
paso es usar la cinta de doble cara para pegar la batería a la tabla y usar la
cinta americana para pegar el cable de la aspiradora a la batería (este último
paso hacerlo al final para poder hacer más fácilmente el cableado).
la tabla y a 8 cm de la esquina cortamos hasta 5 cm hacia el interior de la
tabla, y lo mismo desde la esquina contraria. Después realizamos una serie de
taladros donde se van a colocar los motores (tres por motor y uno opcional para
introducir los cables al motor) para poder introducir las bridas. El siguiente
paso es usar la cinta de doble cara para pegar la batería a la tabla y usar la
cinta americana para pegar el cable de la aspiradora a la batería (este último
paso hacerlo al final para poder hacer más fácilmente el cableado).
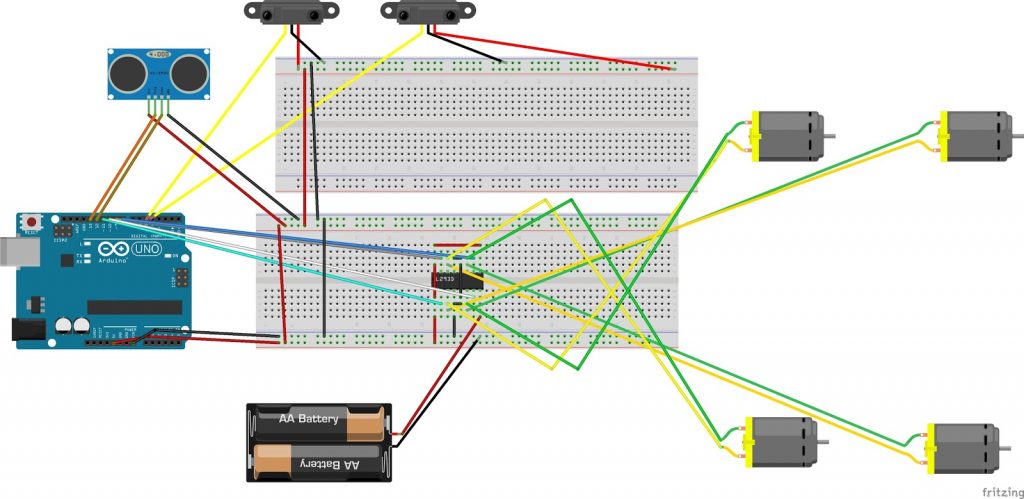
Ahora viene
la parte del circuito, para realizar el circuito tenemos que conectar dos motores
al controlador y el controlador a los puertos 11 y 10 , y los otros dos motores
al otro lado del controlador en sentido inverso y a los puertos 9 y 8 , una vez
realizado eso conectar los infrarrojos a los puertos 6 el derecho y 7 el
izquierdo y el pin VCC al positivo y GND a tierra , después conectar el sensor
de ultrasonidos a tierra, a 5 V y a los puertos 12 el pin TRIG y 13 el pin ECHO.
En el
siguiente dibujo se puede ver de forma gráfica las conexiones entre los motores,
los sensores, el controlador y el Arduino.
siguiente dibujo se puede ver de forma gráfica las conexiones entre los motores,
los sensores, el controlador y el Arduino.
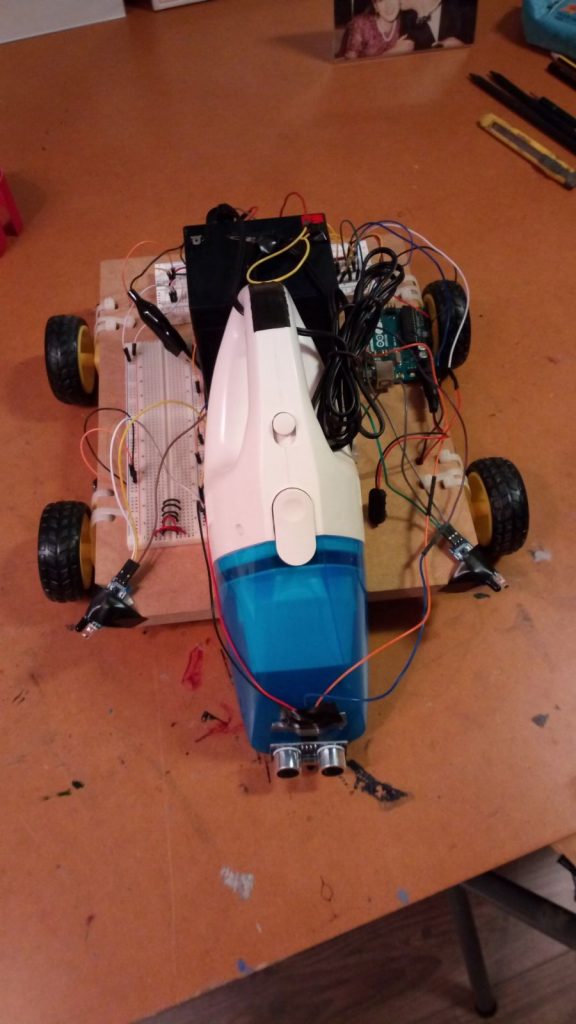
Para unirlo
a la aspiradora el conectar el final del cargador al positivo de la batería y
una de las piezas de hierro de los lados al negativo (es importante no conectar
una pieza de hierro de un lado al positivo y la del otro lado al negativo) .
a la aspiradora el conectar el final del cargador al positivo de la batería y
una de las piezas de hierro de los lados al negativo (es importante no conectar
una pieza de hierro de un lado al positivo y la del otro lado al negativo) .
Código para el Arduino.
#define
trigPin 12
trigPin 12
#define
echoPin 13
echoPin 13
#define ir1
7
7
#define ir2
6
6
void setup()
{
Serial.begin(9600);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode(11,OUTPUT);
pinMode(trigPin,OUTPUT);
pinMode(echoPin,INPUT);
pinMode(ir1,INPUT);
pinMode(ir2,INPUT);
}
void loop(){
int duration, distance;
int flag,valIzq,valDcha;
valIzq=digitalRead(ir1);
valDcha=digitalRead(ir2);
Serial.println(valIzq);
Serial.println(valDcha);
digitalWrite(trigPin,LOW);
delayMicroseconds(100);
digitalWrite(trigPin,HIGH);
delayMicroseconds(100);
digitalWrite(trigPin,LOW);
duration = pulseIn(echoPin,HIGH);
distance = (duration/2/29);
if (distance >= 400 || distance <= 0){
Serial.println(«Out of range»);
Serial.print(distance);
Serial.println(» cm»);
}else {
Serial.print(distance);
Serial.println(» cm»);
}
delay(1000);
if (valIzq==0){
Serial.println(«GIRA A LA DERECHA»);
digitalWrite(8,LOW);
digitalWrite(9,HIGH);
digitalWrite(10,HIGH);
digitalWrite(11,LOW);
delay(50ç0);
Serial.println(«STOP»);
digitalWrite(8,LOW);
digitalWrite(9,LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
}else if (valDcha==0){
Serial.println(«GIRA A LA IZQUIERDA»);
digitalWrite(8,HIGH);
digitalWrite(9,LOW);
digitalWrite(10,LOW);
digitalWrite(11,HIGH);
delay(500);
Serial.println(«PARA»);
digitalWrite(8,LOW);
digitalWrite(9,LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
}else if (distance >=20 || distance
<=0){
<=0){
Serial.println(«AVANZA»);
digitalWrite(8,HIGH);
digitalWrite(9,LOW);
digitalWrite(10,HIGH);
digitalWrite(11,LOW);
delay(150);
Serial.println(«PARA»);
digitalWrite(8,LOW);
digitalWrite(9,LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
}else{
Serial.println(«RETROCEDE Y GIRA»);
digitalWrite(8,LOW);
digitalWrite(9,HIGH);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
delay(500);
Serial.println(«PARA»);
digitalWrite(8,LOW);
digitalWrite(9,LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
}
}
}
Problemas encontrados.
Los
materiales no llegaban o llegaban muy justos, hemos tenido que ir a alguna
tienda o volver a pedir otros que llegasen antes.
materiales no llegaban o llegaban muy justos, hemos tenido que ir a alguna
tienda o volver a pedir otros que llegasen antes.
Los motores
que compramos no tenían caja reductora por lo que al poner algo de resistencia
se paraba y no recupera su velocidad, es decir tenían muchos rpm, pero no
tenían potencia.
que compramos no tenían caja reductora por lo que al poner algo de resistencia
se paraba y no recupera su velocidad, es decir tenían muchos rpm, pero no
tenían potencia.
Los sensores
de ultrasonidos dejaron funcionar, lo supimos ya que el sensor devolvía todo el
rato 0, hubo que comprar otro.
de ultrasonidos dejaron funcionar, lo supimos ya que el sensor devolvía todo el
rato 0, hubo que comprar otro.
El
controlador L293 se quemó debido a una mala conexión en los cables y hubo que
comprar otro.
controlador L293 se quemó debido a una mala conexión en los cables y hubo que
comprar otro.
Los sensores
infrarrojos son muy sensibles a la luz y estaban detectando obstáculos cuando
no los había y tuvimos que manipularlos a mano, giran una especie de rueda que
tienen en una caja pequeña azul.
infrarrojos son muy sensibles a la luz y estaban detectando obstáculos cuando
no los había y tuvimos que manipularlos a mano, giran una especie de rueda que
tienen en una caja pequeña azul.
MEJORAS POSIBLES.
• Añadir
un botón de encendido y apagado o permitir hacerlo de manera remota.
un botón de encendido y apagado o permitir hacerlo de manera remota.
•
Programar
una hora para que se ponga en funcionamiento.
Programar
una hora para que se ponga en funcionamiento.
• Poner
un tiempo para que se pare sola después de que se termine ese tiempo y que te
avise de manera sonora al terminar.
un tiempo para que se pare sola después de que se termine ese tiempo y que te
avise de manera sonora al terminar.
•
Añadir
una aspiradora con mayor potencia de absorción.
Añadir
una aspiradora con mayor potencia de absorción.
•
Añadir
una batería que dure más.
Añadir
una batería que dure más.
•
Hacer
posible cargar la batería conectándola a la red.
Hacer
posible cargar la batería conectándola a la red.
• Añadir
una carrocería o carcasa para proteger el cableado y hacer a RAMBO más
elegante.
una carrocería o carcasa para proteger el cableado y hacer a RAMBO más
elegante.
•
Mejorar
el algoritmo de desplazamiento para que limpie por toda la casa de manera
adecuada.
Mejorar
el algoritmo de desplazamiento para que limpie por toda la casa de manera
adecuada.
VÍDEO.