ROBOT BALANCÍN
JULIÁN LUDEÑA
ÓSCAR MARTÍN MARTÍN
ERIC ALAN MORSE MORA
SERGIO MUÑOZ
1- Introducción
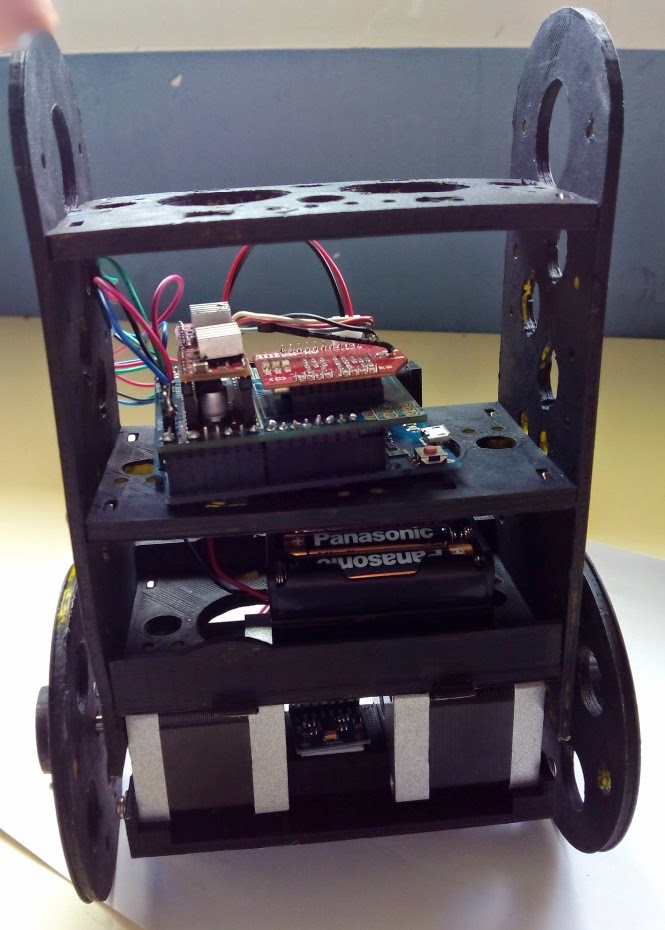
El proyecto realizado es un robot, que utiliza el mismo
principio de funcionamiento que los vehículos tipo segway.
principio de funcionamiento que los vehículos tipo segway.
La idea en origen era equiparle de un sensor para que
detectase obstáculos, pero hemos creído más interesante el dotarle de control
remoto vía WI-FI usando el protocolo OSC.
detectase obstáculos, pero hemos creído más interesante el dotarle de control
remoto vía WI-FI usando el protocolo OSC.
2- Materiales y Precios
Pieza |
Precio/ud |
Arduino Leonardo |
26.40 € |
Motores Stepper (NEMA 17) x 2 |
10.95 € |
Driver Steeper (A4988) x 2 |
5.60 € |
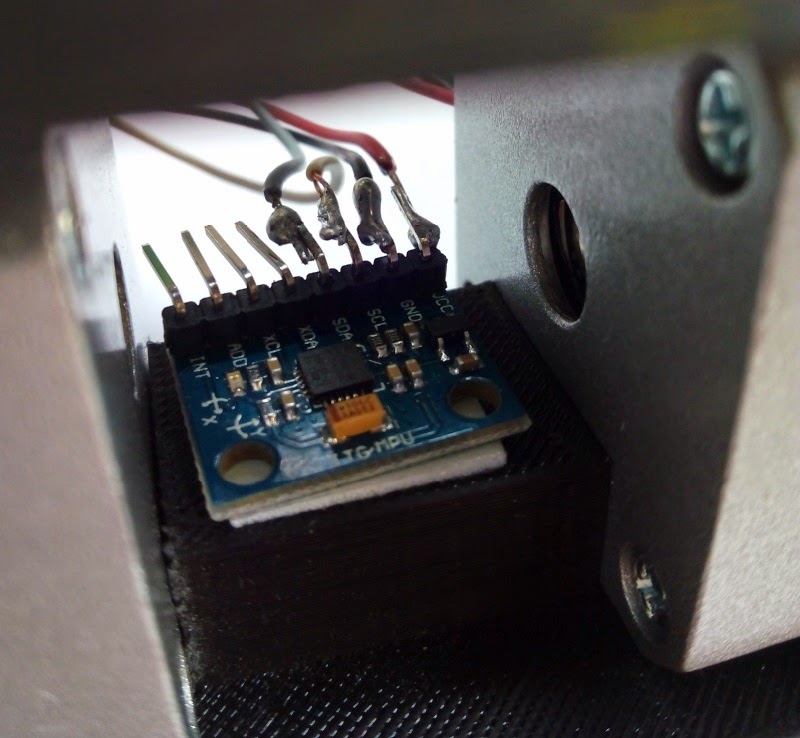
Acelerómetro (MPU-6050) |
8.50 € |
Módulo WiFi (RN-XV) |
45.50 € |
Base Shield Wireless |
29.00 € |
Chasis (Impresión 3D) |
47.95 € |
TouchOSC (Aplicación móvil control) |
4.95 € |
Varios (cables/interruptor/soporte…) |
– € |
Total |
178.85 € |
3- Memoria
Adjuntamos enlace a la memoria en Dropbox:
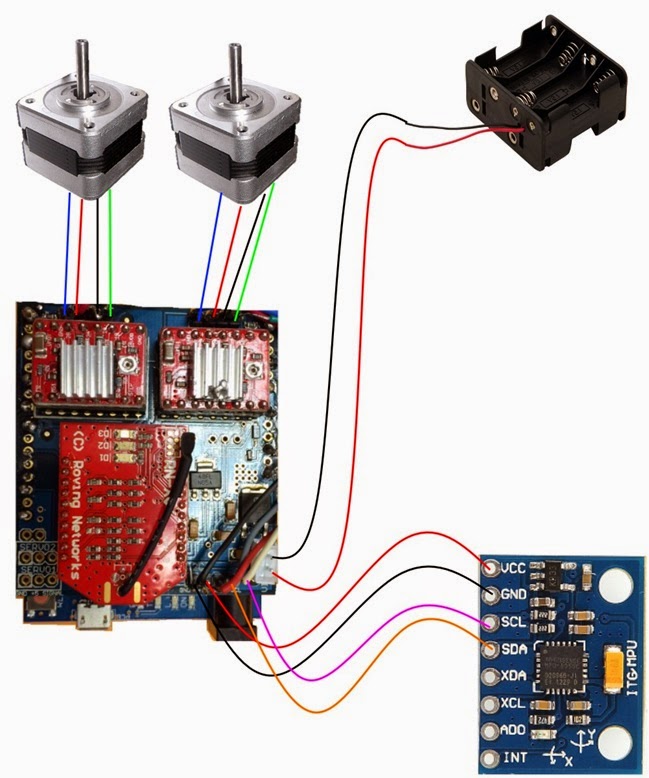
4- Esquemas
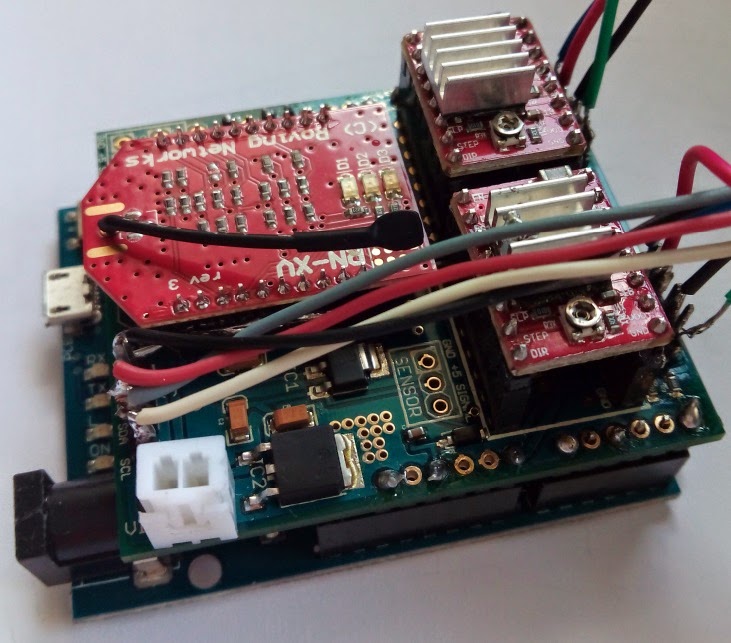
Un esquema general de las conexiones que incluye motores, drivers, el Arduino Leonardo y las pilas es:
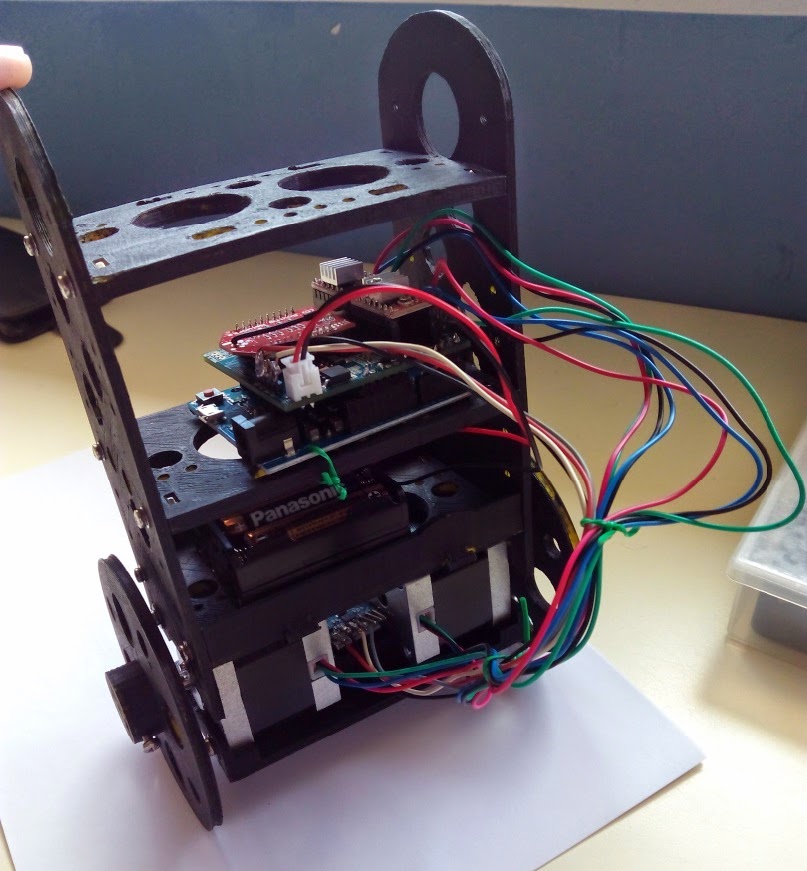
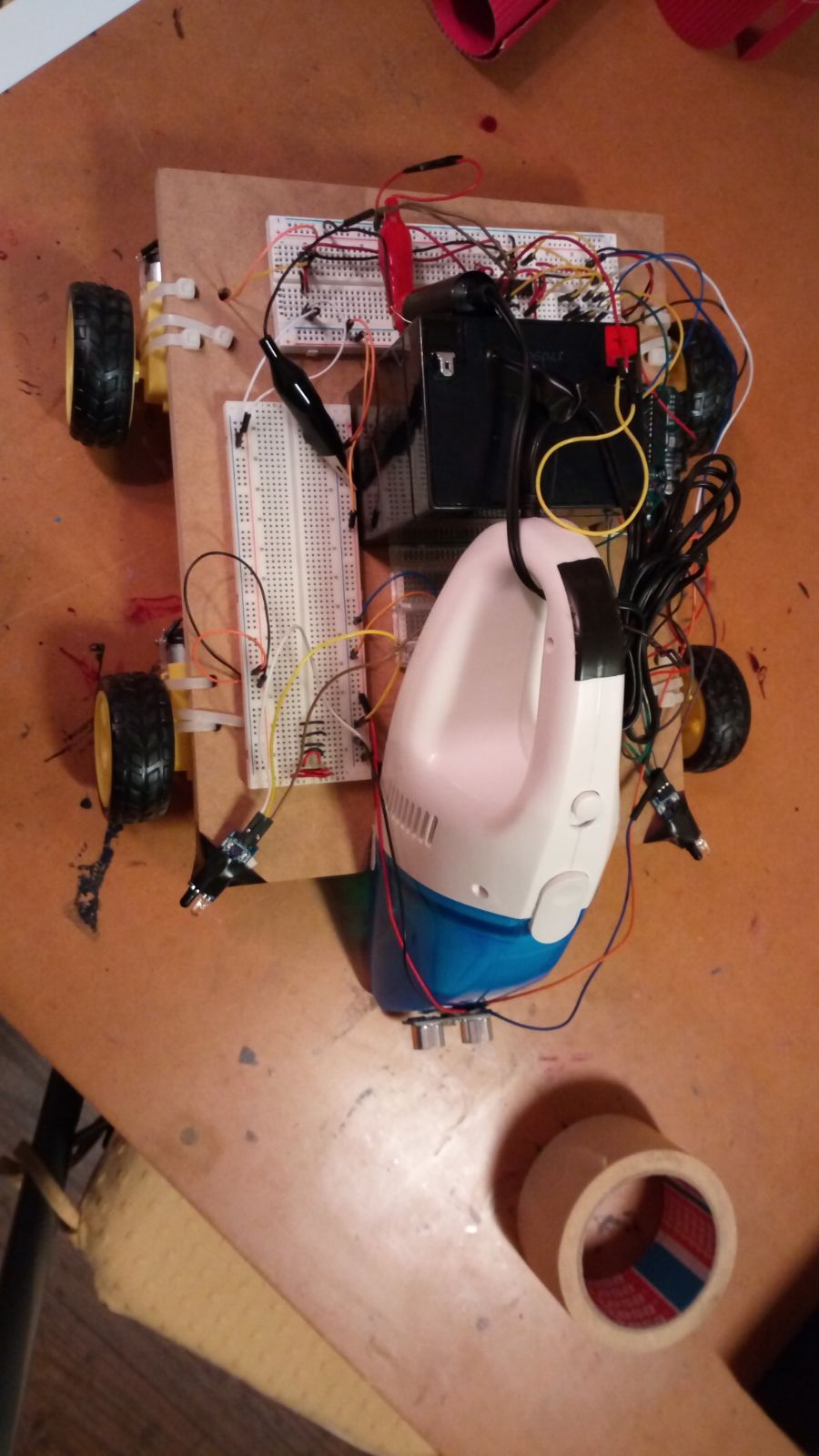
5- Imágenes del robot