Robot Rambo
Introducción
La idea inicial de nuestro proyecto era la de ser capaces de crear un robot que pudiera recibir comandos y ejecutarlos de manera rápida y eficaz. Elegimos la forma de un perro para el robot, lo que hace que el robot adquiera una imagen entrañable, el cual hemos apodado “Rambo”.
En un principio pensamos que el robot pudiera recibir los comandos por vía radio-control a través de un mando, no obstante descartamos dicha idea, debido a que corroboramos que era algo tedioso y poco original. Tras esto se nos ocurrió realizar una aplicación en Android que reconociera nuestra voz, la decodificara, y enviara dichos comandos vía bluetooth al arduino. De esta forma la interacción entre el robot y el usuario es mucho más natural, simulando de una forma más real el comportamiento de un perro.
Como hemos dicho anteriormente el robot tiene una serie de comandos diseñados por nosotros, los cuales se encuentran acorde a la naturaleza del perro y son los siguientes:
- Despertar.
- Dormir.
- Andar.
- Música.
- Patita.
- Ladra.
- Ataca.
- Rambo.
Partes:
El perro posee 3 partes claramente diferenciadas:
- Las patas del perro, compuestas por 5 piezas cada una, lo que hace que sean articuladas y den lugar al balanceo del perro y permita el movimiento.

b)
El cuerpo del perro, que tiene forma de caja de
zapatos para que las patas estén lo suficientemente alejadas, para que tenga el
suficiente recorrido como para posibilitar el movimiento del perro.
El cuerpo del perro, que tiene forma de caja de
zapatos para que las patas estén lo suficientemente alejadas, para que tenga el
suficiente recorrido como para posibilitar el movimiento del perro.

c)
La cabeza del perro, que posee 2 orificios donde
se introducirán dos láseres emulando a los ojos del perro.
La cabeza del perro, que posee 2 orificios donde
se introducirán dos láseres emulando a los ojos del perro.

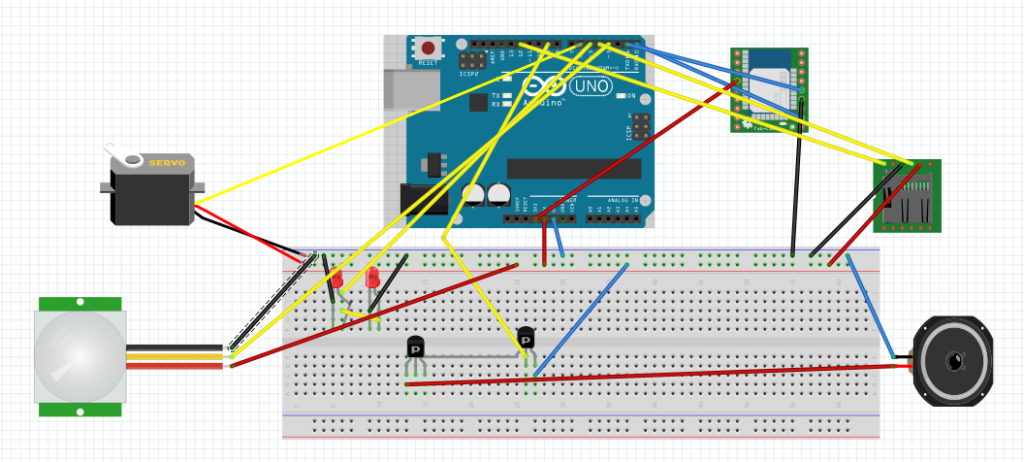
2)
ESQUEMA
ESQUEMA
3)
HARDWARE
HARDWARE
Tras haber explicado en que
consiste nuestro proyecto y haber enumerado sus partes, procedemos a explicar
el hardware utilizado:
consiste nuestro proyecto y haber enumerado sus partes, procedemos a explicar
el hardware utilizado:
· – Arduino uno: Es el elemento más importante del
proyecto, ya que es el que recibe el comando, y dependiendo de cuál sea dicho
comando, ejecuta una u otra sentencia.
proyecto, ya que es el que recibe el comando, y dependiendo de cuál sea dicho
comando, ejecuta una u otra sentencia.

·
Servomotores: Se encuentran en las patas,
habiendo 4 servos en total. Gracias a ellos el perro posee movimiento.
Servomotores: Se encuentran en las patas,
habiendo 4 servos en total. Gracias a ellos el perro posee movimiento.

·
Módulo bluetooth HC-06: Es el que realiza la
función de comunicación entre el arduino y la aplicación de Android, la cual
envía el comando.
Módulo bluetooth HC-06: Es el que realiza la
función de comunicación entre el arduino y la aplicación de Android, la cual
envía el comando.

·
Módulo Micro SD: Permite al arduino acceder a
información almacenada en una tarjeta micro SD. En dicha tarjeta habrá
diferentes sonidos los cuales aparecerán en los diferentes comandos.
Módulo Micro SD: Permite al arduino acceder a
información almacenada en una tarjeta micro SD. En dicha tarjeta habrá
diferentes sonidos los cuales aparecerán en los diferentes comandos.

·
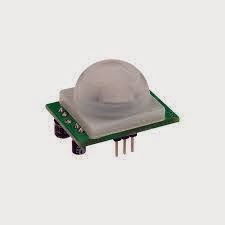
Sensor PIR: Es el utilizado en el comando
“patita” para que el arduino sepa en qué momento debe bajar la pata.
Sensor PIR: Es el utilizado en el comando
“patita” para que el arduino sepa en qué momento debe bajar la pata.
4)
SOFTWARE
SOFTWARE
El
código utilizado es el siguiente:
código utilizado es el siguiente:
https://www.dropbox.com/home/SETR?preview=codigo_rambo.ino
https://www.dropbox.com/home/SETR?preview=codigo_rambo.txt
https://www.dropbox.com/home/SETR?preview=codigo_rambo.txt
5)
ELEMENTOS UTILIZADOS:
ELEMENTOS UTILIZADOS:
NOMBRE |
PRECIO |
ARDUINO UNO |
CEDIDO POR LA UNIVERSIDAD |
ALTAVOZ |
CEDIDO POR LA UNIVERSIDAD |
CABLES |
CEDIDO POR LA UNIVERSIDAD |
MÓDULO BLUETOOTH |
6 € |
MÓDULO MICRO SD |
2 € |
4 SERVOMOTORES |
20 € |
SENSOR PIR |
2 € |
2 PLACAS PROTOBOARD |
7 € |
2 LÁSERES |
2 € |
2 PLACAS DE ALUMINIO |
30 € |
TORNILLOS, TUERCAS, ARANDELAS… |
4 € |
TOTAL |
73 € |
6)
POSIBLES MEJORAS.
POSIBLES MEJORAS.
La
precisión en el movimiento del perro depende de forma considerable de la
superficie, esto debe en mayor medida en la potencia de los servomotores,
debido a esto en ocasiones el robot es incapaz de andar. Optimizar el
desplazamiento del perro sería una mejora a tener en cuenta en futuros
prototipos.
precisión en el movimiento del perro depende de forma considerable de la
superficie, esto debe en mayor medida en la potencia de los servomotores,
debido a esto en ocasiones el robot es incapaz de andar. Optimizar el
desplazamiento del perro sería una mejora a tener en cuenta en futuros
prototipos.
Otra
mejora que se podría realizar es la insertar sensores ultrasonidos tanto en la
parte trasera como delantera del perro, impidiendo que colisiones con
diferentes obstáculos.
mejora que se podría realizar es la insertar sensores ultrasonidos tanto en la
parte trasera como delantera del perro, impidiendo que colisiones con
diferentes obstáculos.
Finalmente
se podría implementar el comando “Busca”, el cual consistiría en tirar una
pelota, y que el perro por sensores de proximidad fuera capaz de encontrarla en
un espacio reducido.
VÍDEO DEL PROYECTO:
https://www.youtube.com/watch?v=ZDoXpvbT524&feature=youtu.be
se podría implementar el comando “Busca”, el cual consistiría en tirar una
pelota, y que el perro por sensores de proximidad fuera capaz de encontrarla en
un espacio reducido.
VÍDEO DEL PROYECTO:
https://www.youtube.com/watch?v=ZDoXpvbT524&feature=youtu.be

