SEyTR_GII_Mostoles_2016-17,Grupo 13, Plotter
En este enlace se incluye todo lo requerido (código fuente, memoria y diapositivas).
Enlaces a vídeos:
Memoria (Recomendable ver en GitHub, puesto que aquí no se ven las fotos).
GRUPO 13
Patricia de Gregorio Ruiz
Agustín Daniel Schüler
Jorge Aranda García
PLOTTER
Sistemas Empotrados y
de Tiempo Real.Curso 2016/2017.
de Tiempo Real.Curso 2016/2017.
Universidad Rey Juan
Carlos. Móstoles
Carlos. Móstoles

ÍNDICE
1.- INTRODUCCIÓN
En este proyecto el principal objetivo era conseguir que un
robot que ya era capaz de dibujar, a través de fotos vectorizadas que se le
pasaban por un programa específico, fuese capaz de dibujar controlado por un
usuario a través de un joystick, de forma que la persona que lo controla tenga
total libertad a la hora de dibujar o escribir aquello que desee.
robot que ya era capaz de dibujar, a través de fotos vectorizadas que se le
pasaban por un programa específico, fuese capaz de dibujar controlado por un
usuario a través de un joystick, de forma que la persona que lo controla tenga
total libertad a la hora de dibujar o escribir aquello que desee.
2.-MOTIVACIÓN
La motivación de este proyecto es ayudar a aquellas personas
que tengan algún tipo de disfunción en los miembros superiores, a ser capaces
de escribir y expresarse de una forma que no suponga un reto para el usuario.
De esta forma favorecemos la integración de estas personas que de un modo u
otro puedan sentirse un poco apartadas de la sociedad.
que tengan algún tipo de disfunción en los miembros superiores, a ser capaces
de escribir y expresarse de una forma que no suponga un reto para el usuario.
De esta forma favorecemos la integración de estas personas que de un modo u
otro puedan sentirse un poco apartadas de la sociedad.
Además es un proyecto muy interesante para nosotros como
ingenieros, puesto que es uno de los pocos proyectos durante todo el grado en
el que se nos permite manipular todo este tipo de elementos más hardware y
combinarlo con la programación del software. Junto todo a esto y terminado el
proyecto, pensamos que puede ser una buena base para un futuro Trabajo de Fin
de Grado, incluyendo alguna de las mejoras que mencionaremos más tarde.
ingenieros, puesto que es uno de los pocos proyectos durante todo el grado en
el que se nos permite manipular todo este tipo de elementos más hardware y
combinarlo con la programación del software. Junto todo a esto y terminado el
proyecto, pensamos que puede ser una buena base para un futuro Trabajo de Fin
de Grado, incluyendo alguna de las mejoras que mencionaremos más tarde.
3.- COMPONENTES DEL
PROYECTO
Los componentes básicos de nuestro robot, es un pack
denominado XY PLOTTER de la compañía MakeBlock y se compone de los elementos
que se muestran en la siguiente fotografía:
denominado XY PLOTTER de la compañía MakeBlock y se compone de los elementos
que se muestran en la siguiente fotografía:

Cabe destacar la importancia de la placa “Me Orion Board”,
placa incluida en el pack mencionado anteriormente puesto que con ella
controlamos el movimiento del motor del eje X del robot, el del eje Y, además
del Joystick que enviaba su posición para que estos motores se moviesen.
Destacar que todo lo que se puede hacer con la placa Orion se puede hacer con
Arduino Uno, ya que la Orion Board está basada en Arduino Uno.
placa incluida en el pack mencionado anteriormente puesto que con ella
controlamos el movimiento del motor del eje X del robot, el del eje Y, además
del Joystick que enviaba su posición para que estos motores se moviesen.
Destacar que todo lo que se puede hacer con la placa Orion se puede hacer con
Arduino Uno, ya que la Orion Board está basada en Arduino Uno.
Esta placa es un Arduino simple pero facilita la conexión de
los componentes a través de unos puertos similares a los de Ethernet. Por otro
lado esto supuso un problema porque no podíamos integrar al proyecto otros
componentes como algunos de los mencionados a continuación, que fueron
integrados en la placa Arduino Uno proporcionada por el profesor.
los componentes a través de unos puertos similares a los de Ethernet. Por otro
lado esto supuso un problema porque no podíamos integrar al proyecto otros
componentes como algunos de los mencionados a continuación, que fueron
integrados en la placa Arduino Uno proporcionada por el profesor.
Los componentes son los siguientes:
●
4 switches, que controlaban los extremos del robot y
conectados a un par de altavoces emitían un sonido
4 switches, que controlaban los extremos del robot y
conectados a un par de altavoces emitían un sonido
●
2 altavoces
2 altavoces
●
Un servo (Aunque se compraron varios porque era más
económico), para controlar si el robot dibujaba o no, bajando o no el bolígrafo
o rotulador.
Un servo (Aunque se compraron varios porque era más
económico), para controlar si el robot dibujaba o no, bajando o no el bolígrafo
o rotulador.
●
Un pulsador, para controlar el servo a nuestro antojo.
Un pulsador, para controlar el servo a nuestro antojo.
●
Una pila de 9V, para proporcionar alimentación a la
placa
Una pila de 9V, para proporcionar alimentación a la
placa
●
Materiales de bricolaje varios (aceite engrasante,
bridas, tornillos, cinta de doble cara…)
Materiales de bricolaje varios (aceite engrasante,
bridas, tornillos, cinta de doble cara…)
Así como todo aquellos proporcionado por el profesor.
La conexión de estos componentes se corresponde con la
figura aquí debajo:
figura aquí debajo:

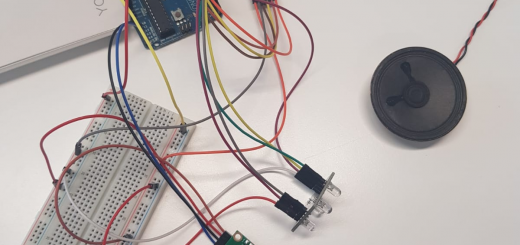
Nótese que los 4 botones que hay entre la placa de Arduino y
la protoboard, son “LimitSwitch” que el robot utiliza para saber cuándo tiene
que parar, pero el programa de simulación no tenía dichos componentes. La pieza
real es la que se muestra a continuación:
la protoboard, son “LimitSwitch” que el robot utiliza para saber cuándo tiene
que parar, pero el programa de simulación no tenía dichos componentes. La pieza
real es la que se muestra a continuación:

4.- PRESUPUESTO

Aunque el presupuesto pueda parecer algo abultado, creemos
que se justifica con nuestra intención de seguir trabajando en el proyecto,
añadiendo mejoras y siendo una posibilidad real de que se presente como TFG.
Como dijimos en clase a la hora de presentar el Plotter, el robot presenta
infinidad de mejoras (agregar un eje Z y poder imprimir en 3D).
que se justifica con nuestra intención de seguir trabajando en el proyecto,
añadiendo mejoras y siendo una posibilidad real de que se presente como TFG.
Como dijimos en clase a la hora de presentar el Plotter, el robot presenta
infinidad de mejoras (agregar un eje Z y poder imprimir en 3D).
5.- EVOLUCIÓN DEL
PROYECTO
●
El inicio de
los tiempos: En esta fotografía
se pueden observar los componentes del robot de Makeblock.
El inicio de
los tiempos: En esta fotografía
se pueden observar los componentes del robot de Makeblock.

●
Fase
intermedia: Tras montar los componentes, el robot estructuralmente
estaba bien, pero no funcionaba de una manera adecuada puesto que los motores
no se movían como debían. Tras comprobar que habíamos cometido un error al
conectarlos, y solventarlo, procedimos a la conexión del servo el cual se
rompió(de ahí la necesidad de tener que comprar nuevos) y más tarde tuvimos que
comprar tornillos, para sujetarlo:
Fase
intermedia: Tras montar los componentes, el robot estructuralmente
estaba bien, pero no funcionaba de una manera adecuada puesto que los motores
no se movían como debían. Tras comprobar que habíamos cometido un error al
conectarlos, y solventarlo, procedimos a la conexión del servo el cual se
rompió(de ahí la necesidad de tener que comprar nuevos) y más tarde tuvimos que
comprar tornillos, para sujetarlo:

En la imagen se puede apreciar como el servo está pegado a
la estructura con cinta aislante, puesto que nos fue complicado encontrar los
tornillos necesarios.
la estructura con cinta aislante, puesto que nos fue complicado encontrar los
tornillos necesarios.
●
Fase Final: Cuando
el problema del servo había sido solucionado, ya empezamos a controlarlo con el
pulsador y definir el sonido que se emitía al ser pulsados los switches.
Realmente esta fase, fue bastante sencilla y dinámica.
Fase Final: Cuando
el problema del servo había sido solucionado, ya empezamos a controlarlo con el
pulsador y definir el sonido que se emitía al ser pulsados los switches.
Realmente esta fase, fue bastante sencilla y dinámica.
En
esta foto se puede apreciar la conexión de los altavoces:
esta foto se puede apreciar la conexión de los altavoces:

Este enlace muestra el vídeo en el que se muestra el correcto
funcionamiento del robot, así como de los switches y los altavoces:
funcionamiento del robot, así como de los switches y los altavoces:
Por último,una foto en la que se puede observar el resultado
final del robot:
final del robot:

6- LIBRERÍAS
Hemos incluido este apartado porque creíamos conveniente,
explicar un poco el motivo por el cual usar algunas librerías.
explicar un poco el motivo por el cual usar algunas librerías.
“MeOrion.h”. Esta librería es la que permite el
funcionamiento de MeOrionBoard. Además nos proporciona aquellas funciones
necesarias para mover los motores( *.move(distancia), *.run()). Además, esta
librería, incluye otra muy importante, “Joystick.h”, puesto que ésta nos
proporciona las funciones para leer los valores del joystick(*.read(1), para el
eje X, *.read(2), para el eje Y).
funcionamiento de MeOrionBoard. Además nos proporciona aquellas funciones
necesarias para mover los motores( *.move(distancia), *.run()). Además, esta
librería, incluye otra muy importante, “Joystick.h”, puesto que ésta nos
proporciona las funciones para leer los valores del joystick(*.read(1), para el
eje X, *.read(2), para el eje Y).
Otra de las librerías es “Servo.h”, propia de Arduino. Nos
permite controlar el movimiento del servomotor. Esta librería incluye
*.write(valor), que hace moverse al servo los grados que se le pasen en el
parámetro valor.
permite controlar el movimiento del servomotor. Esta librería incluye
*.write(valor), que hace moverse al servo los grados que se le pasen en el
parámetro valor.
Enlace sobre librería “MeOrion”:
https://github.com/Makeblock-official/Makeblock-Libraries/tree/master/makeblock/src