Torreta The Punisher – Móstoles Grupo 3
The Punisher

Introducción y Objetivos
Los integrantes del grupo somos Daniel Martín de Castro, Sergio Palacios Gil y Christian Díaz Silva.
Nuestro proyecto empezó con la idea de generar una torreta de apuntado y tiro.
Rápidamente abandonamos la idea de lanzar un objeto por los componentes que requeriríamos y los que disponíamos, por lo que sustituimos un sistema de proyectiles por un sistema de láser marcador.
Uno de los motivos fue que no precisan cálculo balístico al viajar en línea recta, pero el principal fue que de forma visual se aprecia dónde se apunta.
Para aumentar la complejidad del proyecto fuimos añadiendo características adicionales, como un sistema de movimiento y un sistema automático de detección y apuntado.
Finalmente obtuvimos un Cañón Automático Sobre Torreta Inclinada Giratoria Adaptada en Doble Oruga Rotatoria, siglas de CASTIGADOR, en referencia al personaje The Punisher.
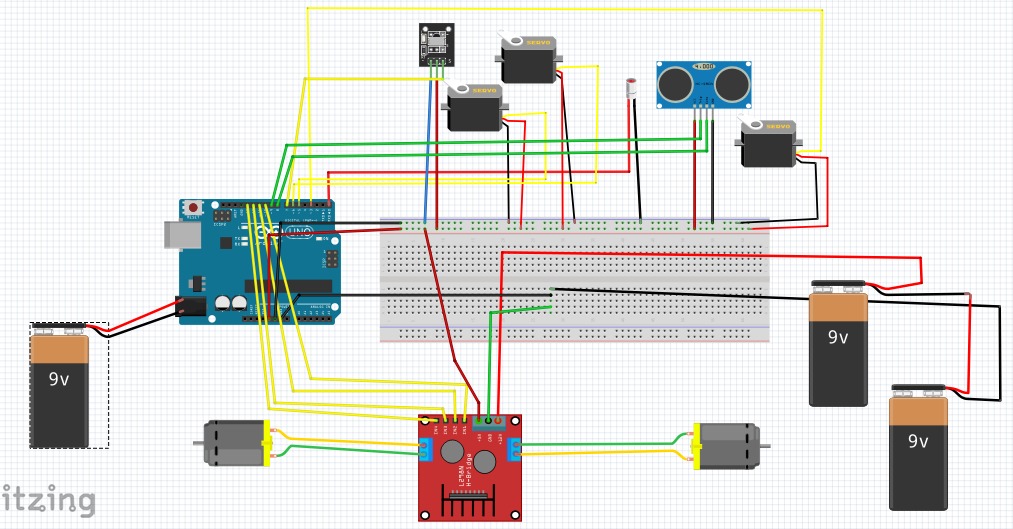
Componentes
- Conector de batería de 9V x3.
- Controlador L298N x1.
- Diodo láser 650nm 5mW 5V x1.
- Plataforma Pan / Tilt (torreta) x1.
- Servo SG90 x3.
- Chasis con dos motores y orugas x1.
- Placa Arduino ONE x1.
- Placa de Expansión de Arduino x1.
- Pilas de 9V x3.
- Receptor IR x1.
- Emisor y receptor de Ultrasonidos x1.
- Mando IR x1.
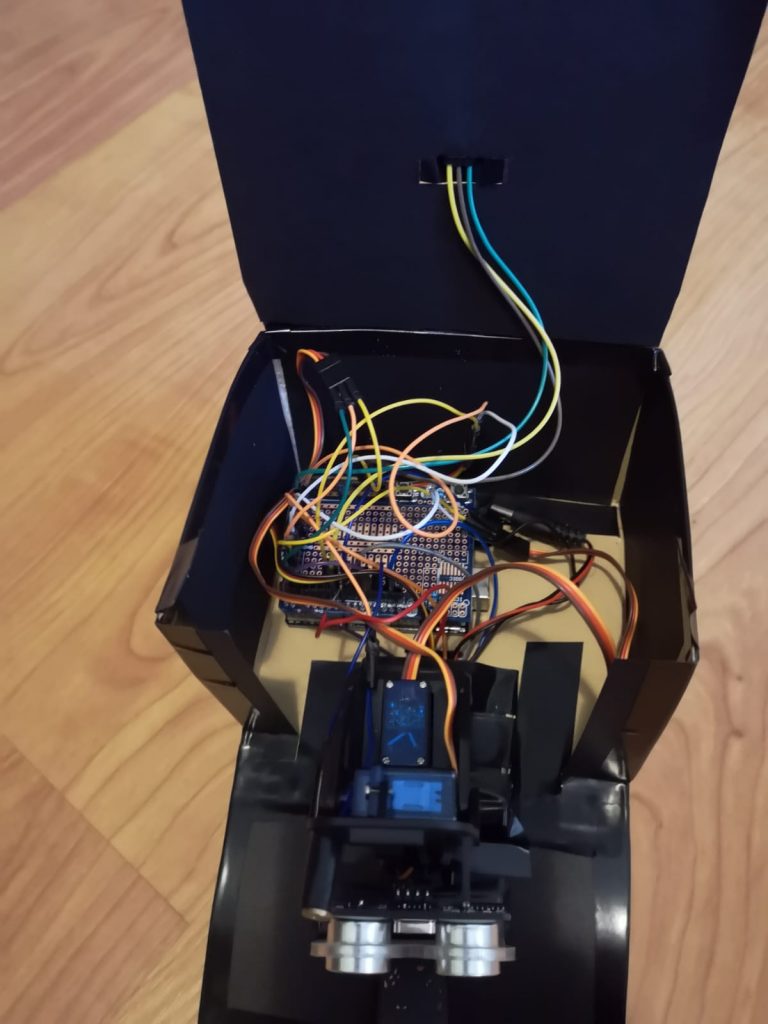
Versión Final

Problemas Encontrados y Posibles Mejoras
aprendizaje del Arduino, no teníamos claros algunos pines y los temas de
voltaje, pero con documentación e investigación hemos conseguido que funcione
todo correctamente.
realizarlas, ya que el receptor IR detectaba las señales de algún otro
dispositivo de algún otro grupo del aula.
de componentes hardware por desgaste o por mal uso debido a nuestro
desconocimiento. Por ejemplo, se quemó un controlador L298N porque no sabíamos
bien como funcionaba el tema de los jumpers
y su alimentación. También nos dejó de funcionar uno de los pines del Arduino.
Y en el transcurso de la práctica hemos tenido que tirar tres servos SG90.
básica. Al querer que fuese autónomo y no conectado a un ordenador como fuente
de alimentación, se incluyeron todos los materiales en la plataforma,
incluyendo una pila de alimentación de Arduino y cuatro pilas AA para alimentar
los motores. Al hacer esto, pesaba demasiado para moverse, así que necesitamos
reducir peso. La solución a la que llegamos fue quitar el receptáculo de pilas
AA y hacer sitio para poner una pila de 9V, que pesaba menos, pero seguíamos
teniendo menos potencia de la necesaria, así que le añadimos otra pila de 9V,
que añadía peso pero más voltaje, consiguiendo finalmente que la plataforma se
moviera de forma autónoma.
montaje, se soltó un cable de alimentación de uno de los motores de la base
oruga, y al intentar arreglarlo acabamos dañando más allá de cualquier posible
reparación uno de los motores de las ruedas, y sin tiempo para tenerlo
arreglado de caras a la presentación en clase.
para que se mueva bien, una posible mejora es añadir un lanzador físico a la
torreta, del tipo disparador de aire comprimido o un pulsador solenoide.
Informe Detallado y Código Final
Los interesados (y el profesor) pueden descargar un informe detallado paso por paso y etapa a etapa con todos los códigos y fases del proyecto en el siguiente enlace. También incluye el código Arduino y la genial presentación en PowerPoint vista en clase.
https://drive.google.com/open?id=1jpGHMhjDbyxbzBWxniVtCMYOZ1DQDtao
Muchas gracias.
