Torreta Inteligente. Grupo 7. Vicálvaro.
Torreta inteligente
Grupo 7

Idea global
Torreta móvil con dos modos de funcionamiento:
-Automático: mediante una cámara que capta la imagen se reconoce objetos en movimiento y reacciona
moviendo dos servos, uno para el eje X y otro para el eje Y. Estos servos ayudan a apuntar
la torreta hacia el objeto en movimiento.
moviendo dos servos, uno para el eje X y otro para el eje Y. Estos servos ayudan a apuntar
la torreta hacia el objeto en movimiento.
-Modo
manual con joystick: manejamos la torreta nosotros mismos a partir de un joystick.
manual con joystick: manejamos la torreta nosotros mismos a partir de un joystick.
–Modo manual mediante el ratón: manejamos la torreta a través del programa que procesa la imagen proporcionada por la web cam.
Hardware
En
este video tenemos dos servos que a través del teclado los movemos, como
si fuera un videojuego, con la “w” avanza 10 grados y con la “s” decremento 10
grados.
este video tenemos dos servos que a través del teclado los movemos, como
si fuera un videojuego, con la “w” avanza 10 grados y con la “s” decremento 10
grados.
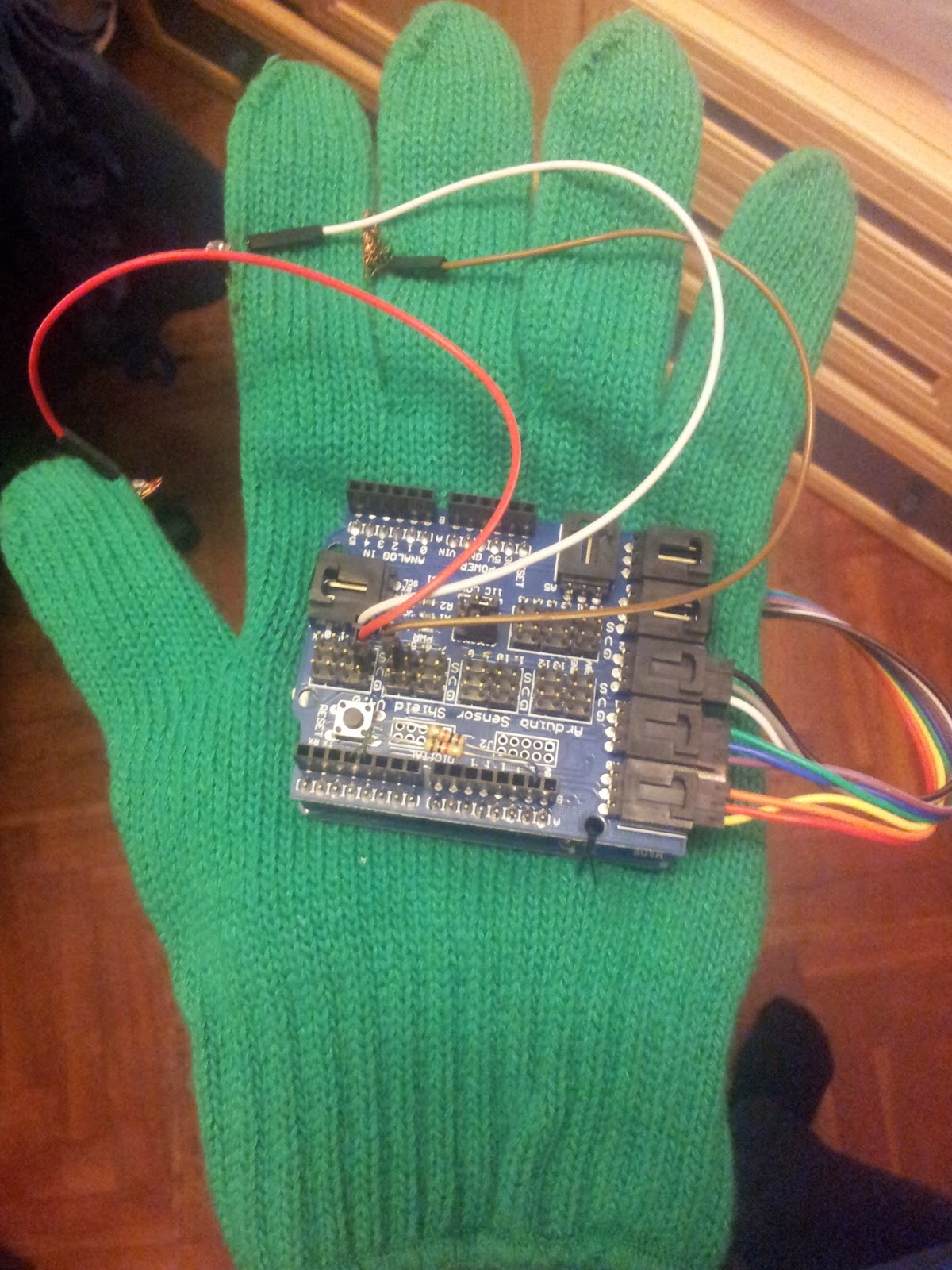
En la siguiente, además de
tener el joystick, añadimos 2 servos que sirven para mover la estructura en los
ejes X e Y, conectados al pin 8 y 9 respectivamente. En la imagen se
observa un tercer servo para activar el gatillo, que finalmente no ha sido utilizado.
tener el joystick, añadimos 2 servos que sirven para mover la estructura en los
ejes X e Y, conectados al pin 8 y 9 respectivamente. En la imagen se
observa un tercer servo para activar el gatillo, que finalmente no ha sido utilizado.

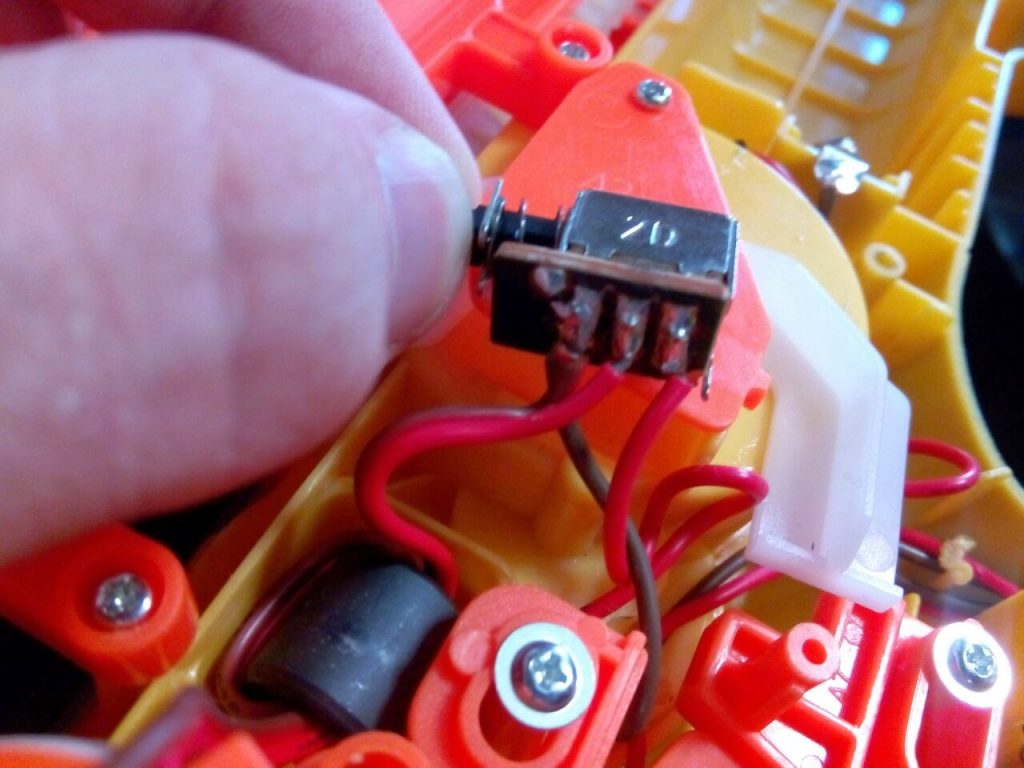
Para activar el gatillo de la pistola hemos puenteado esta como se puede observar en las imágenes:


Lista de materiales

Montaje
Primer objetivo: conectar dos servos al circuito y uno se
mueve en el eje X y otro para el eje Y.
mueve en el eje X y otro para el eje Y.
 |
| Polea con servo eje Y |
 |
| Polea con servo eje X |
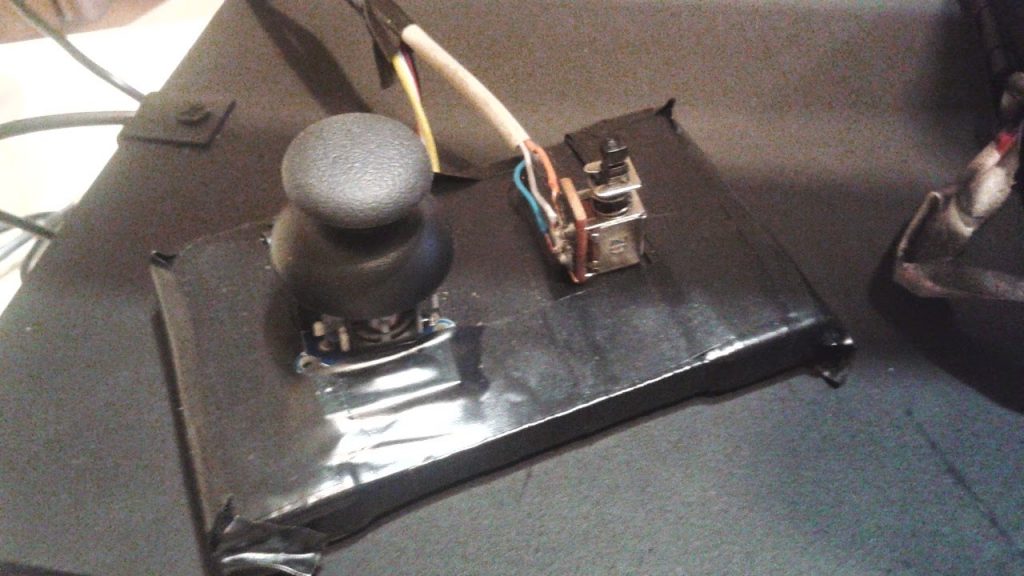
Implementación del joystick para manejar los servos en el modo manual y formamos un mando con el botón y el joystick juntos:
Añadimos a nuestro circuito la
webcam y montamos una caja base (en su interior escondemos parte del circuito) y una torre con dos palas para sujetar el arma.
webcam y montamos una caja base (en su interior escondemos parte del circuito) y una torre con dos palas para sujetar el arma.


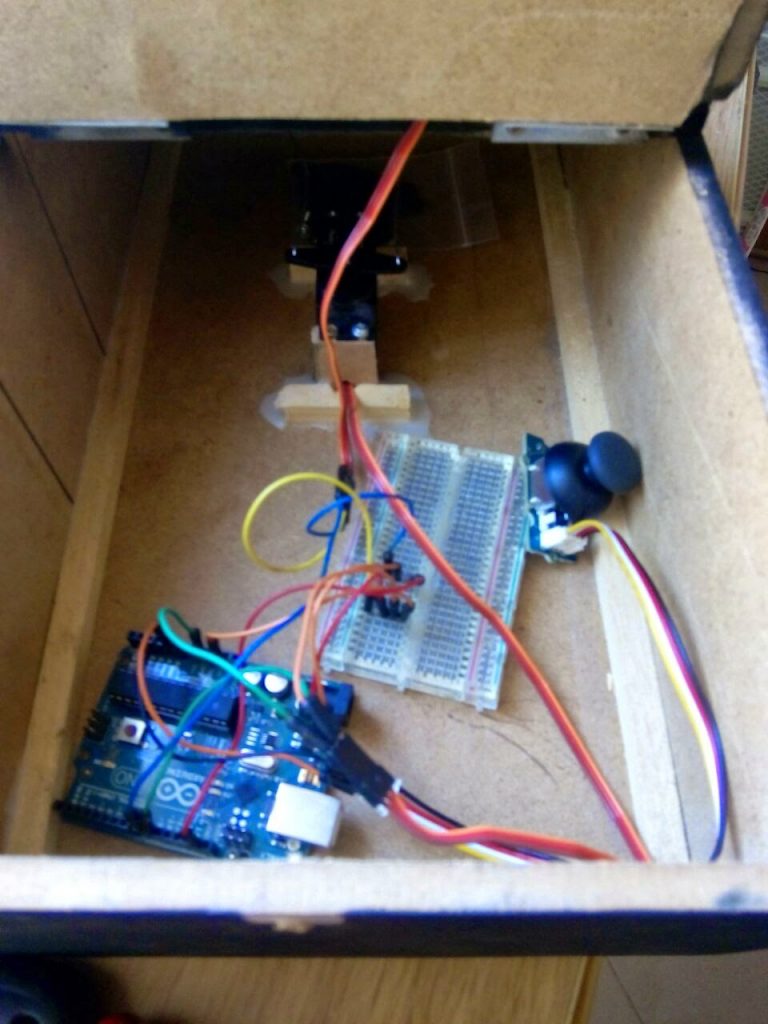
En
la caja base hemos incluido unos LEDS para indicar el modo de funcionamiento en el que se encuentra la torreta.
la caja base hemos incluido unos LEDS para indicar el modo de funcionamiento en el que se encuentra la torreta.
Por
último, pintamos la base, montamos la pistola y
probamos nuestro proyecto.
último, pintamos la base, montamos la pistola y
probamos nuestro proyecto.


Funcionamiento
El
proyecto se compone de tres modos de funcionamiento:
proyecto se compone de tres modos de funcionamiento:
-El
primer modo es el modo manual, permite mover la torreta mediante un joystick similar al de la play station 2.
primer modo es el modo manual, permite mover la torreta mediante un joystick similar al de la play station 2.
-Modo automático: la cámara manda la imagen al ordenador, esta es transformado por la librería de arduino Processing, el cual envía las coordenadas de inclinación al arduino y permite mover los servos correspondientes.
-El
tercer modo de funcionamiento es una combinación de los dos anteriores. Mediante el programa Processing podemos manejar la torreta directamente con el ratón sobre la pantalla proporcionada por la web cam.
tercer modo de funcionamiento es una combinación de los dos anteriores. Mediante el programa Processing podemos manejar la torreta directamente con el ratón sobre la pantalla proporcionada por la web cam.

En esta imagen se
muestra como la cámara detecta a nuestro compañero y el programa manda al
arduino las posiciones a los que se tienen que mover los servos.
muestra como la cámara detecta a nuestro compañero y el programa manda al
arduino las posiciones a los que se tienen que mover los servos.
Por último, los LED tienen como función principal, indicar el modo en el que se encuentra la torreta. Podemos diferenciar:
-El LED rojo, se enciende cuando la torreta se encuentra en modo automático y la cámara detecta movimiento.
-El LED verde, se enciende cuando la torreta se encuentra en modo manual.
Esquema

Photo finish



Demostración modo manual: objetivo
humano.
humano.
https://www.youtube.com/watch?v=Rli2QnQNo8M
Demostración modo automático
https://www.youtube.com/watch?v=KjWNH32ua1g
Demostración modo manual: objetivo
cubo rubik
cubo rubik
https://www.youtube.com/watch?v=LEGdk2s3HYs