WALLDUINO
1. GRUPO
Los integrantes del grupo son:
Diego Méndez Peño
Belén Bargueño Almendro
Jorge Collado Fuertes
2. INTRODUCCIÓN
El objetivo del proyecto es la construcción de un robot parecido al personaje Wall-e con movimientos controlados a través de una aplicación por bluetooth, con la que seleccionaremos el modo de funcionamiento del robot.
La construcción se basa en el uso de un Arduino UNO, incluyendo los componentes necesarios para realizar los movimientos.


3. COMPONENTES
Componente |
Precio (€) |
4 ruedas y 4 motores |
11,98 |
2 baterías |
12,49 |
Ultrasonic module sensor |
14,95 |
Módulo bluetooth |
8,99 |
L298N module (tablero conductor del motor) |
4,78 |
Micro servo |
2,44 |
Tornillos y tuercas |
– |
Pack cables dupont |
3,99 |
Arduino UNO |
20,72 |
V5.0 expansion board |
12,37 |
Piezas lego |
12,10 |
Muñeco Wall-e (para la cabeza y los brazos) |
14,99 |
Cinta adhesiva |
5 |
Pegamento Loctite |
3 |
Contrachapado |
1,50 |
Total |
129,30 |
4. CÓDIGO
5. FUNCIONAMIENTO
Nuestro robot Wall-e funciona de la siguiente manera:
En primer lugar, necesitamos conectar la aplicación al robot mediante el módulo Bluetooth.
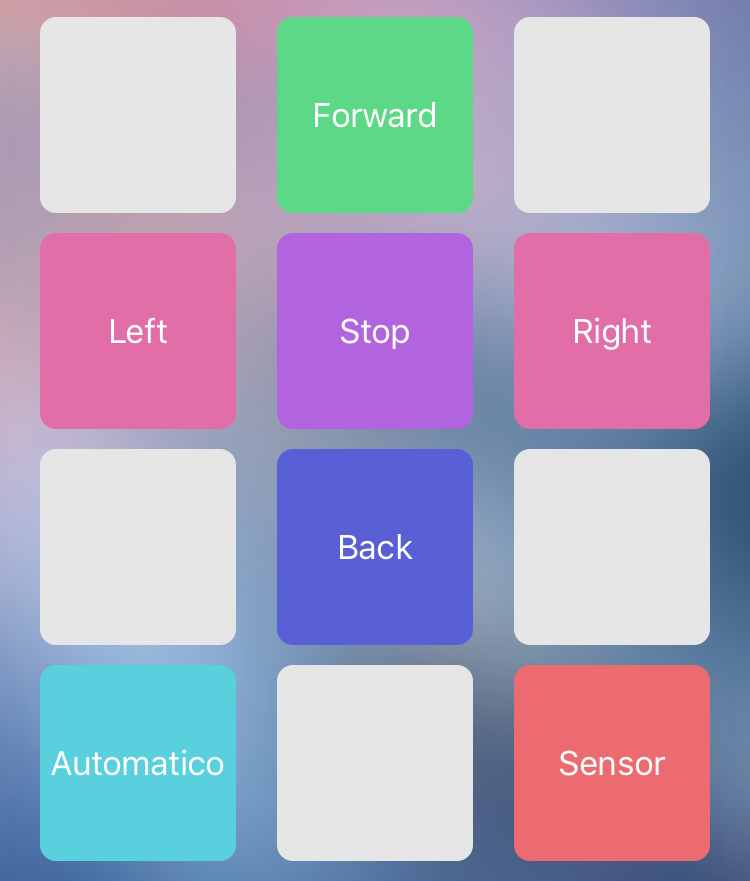
A continuación, la aplicación dispone de diferentes botones. La función de cada uno de ellos al ser pulsados es la siguiente.
- Forward: Wall-e avanza hacia delante.
- Left: Wall-e gira a la izquierda.
- Right: Wall-e gira a la derecha.
- Back: Wall-e avanza marcha atrás.
- Stop: Wall-e se detiene.
- Automático: Wall-e se mueve hacia delante, hacia atrás, hacia la izquierda y derecha durante un tiempo establecido.
- Sensor: Wall-e avanza, pero cuando se encuentra un obstáculo, cambia de dirección para no chocarse.
Esta es una captura de la pantalla de la aplicación con los diferentes botones de modo de uso:
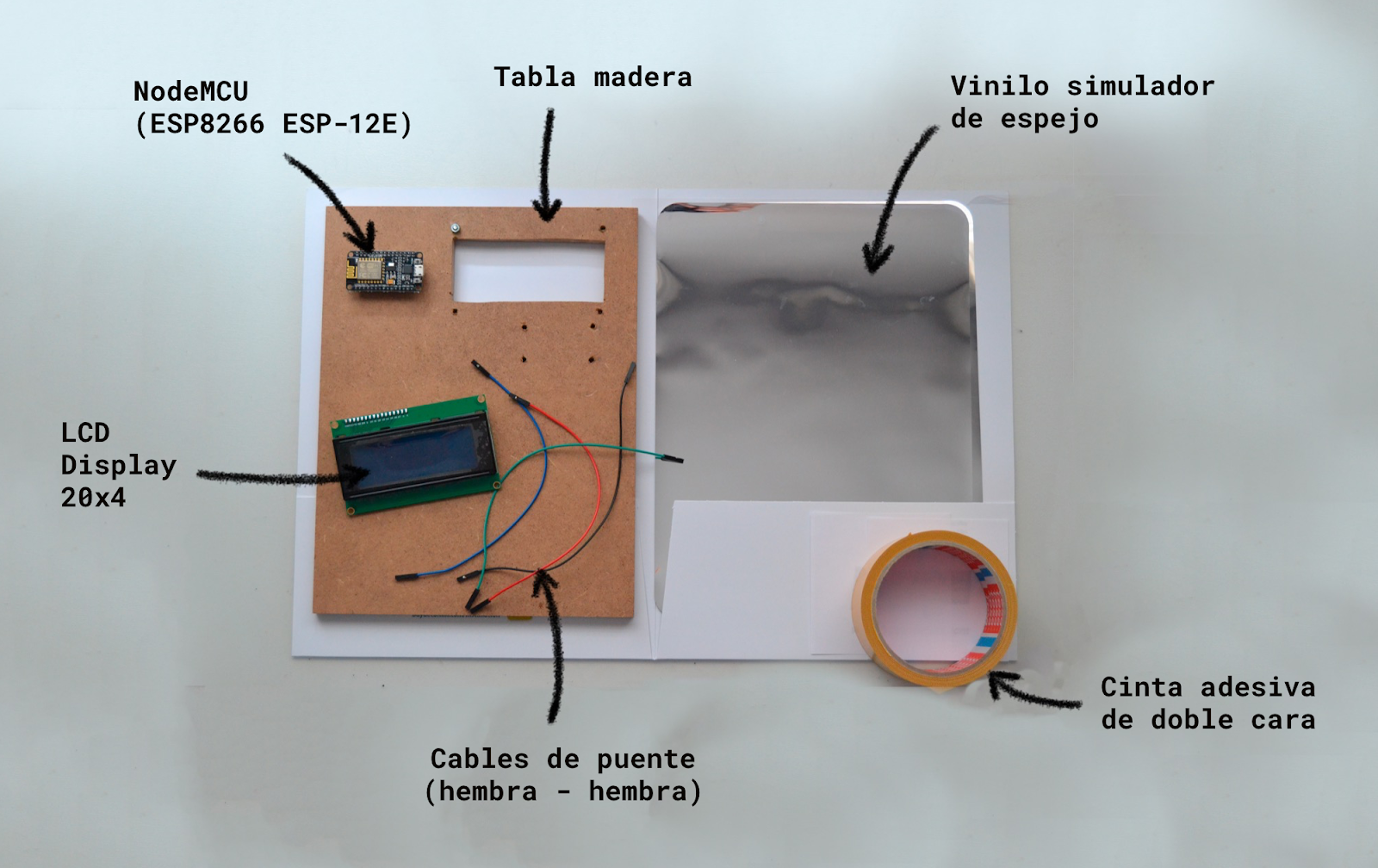
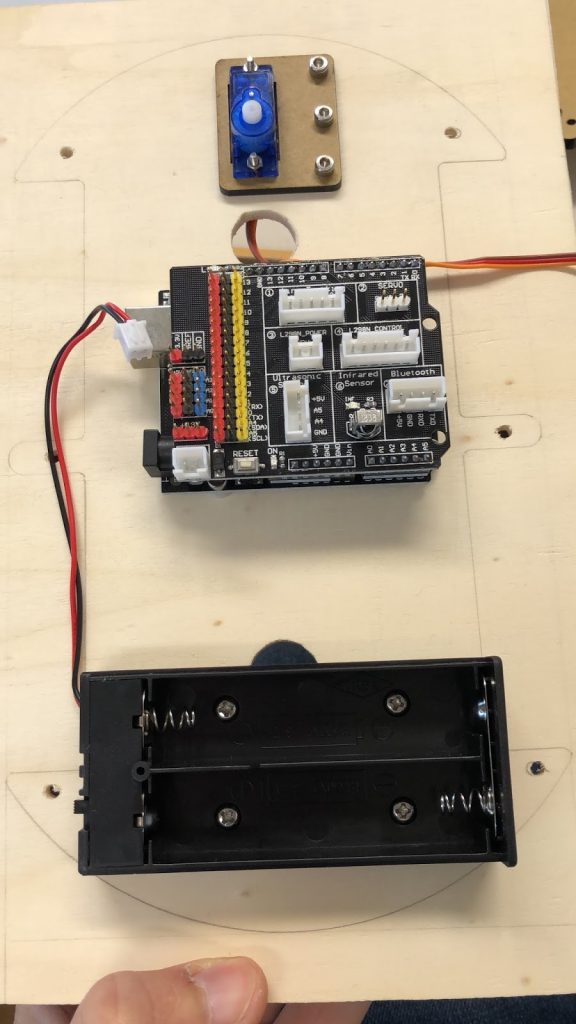
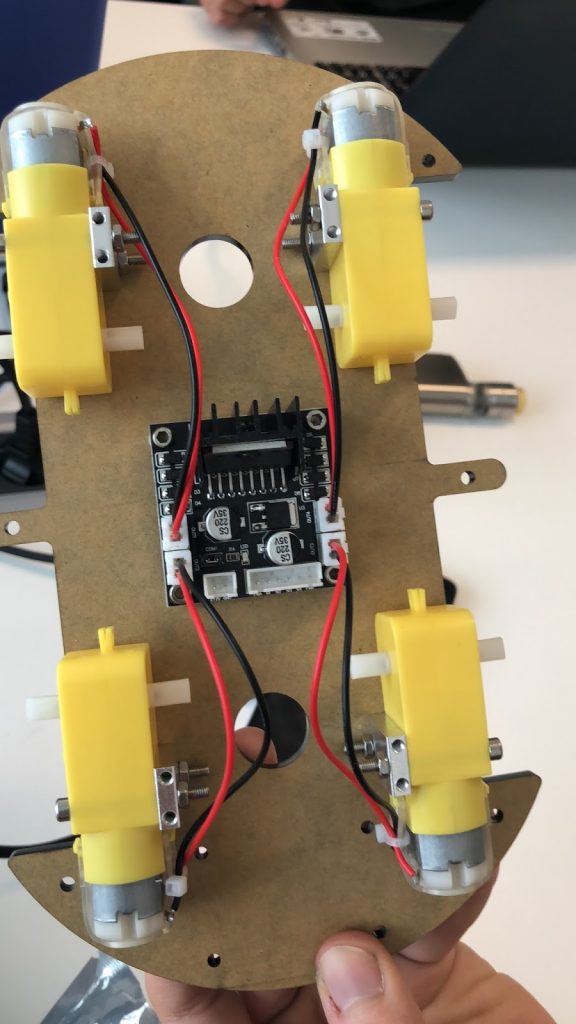
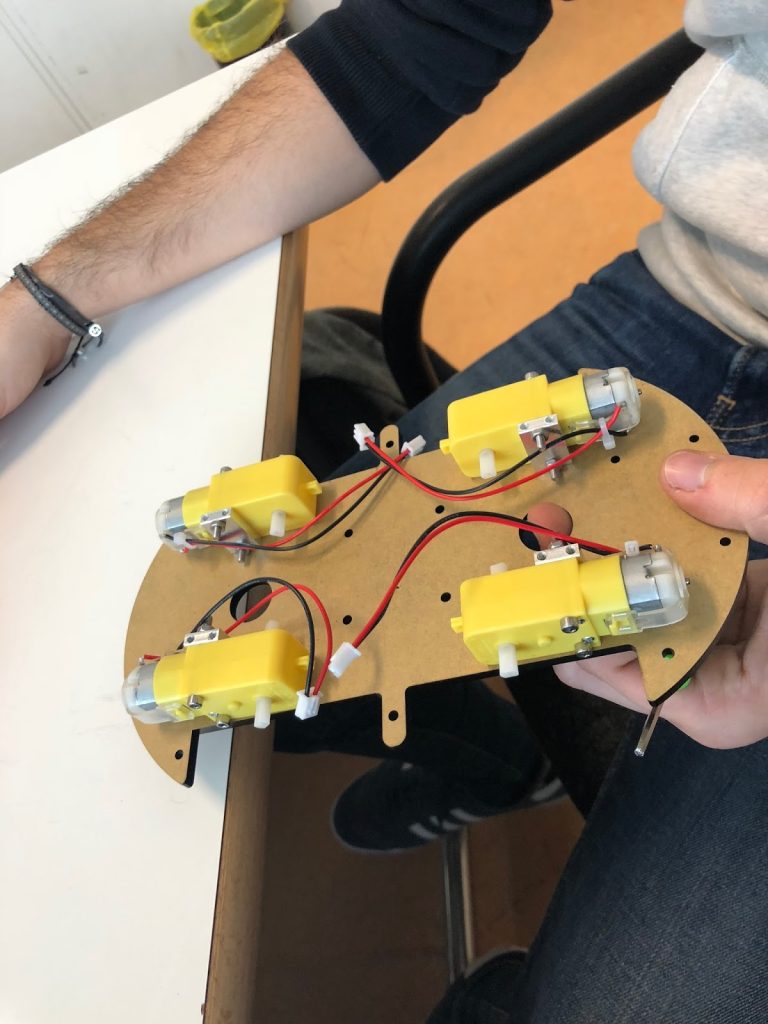
6. FOTOS DEL MONTAJE





7. PROBLEMAS ENCONTRADOS
- Uno de los problemas que nos apareció durante el desarollo del robot , fue la distancia necesitada para poder girar frente a obstáculos.Al principio el robot se paraba demasiado cerca de un obstáculo para emitir el ultrasonido y recibir su respuesta con lo que o no tenía margen para el giro o bien se chocaba.Este problema fue solucionado con el cambio del numero que definía la distancia en el código.
- Hasta poder controlar el modo de funcionamiento del coche a través de la aplicación bluetooth , una vez elegido un modo teníamos problemas para pararlo o para elegir otro modo.Lo solucionamos incluyendo un bucle while en el código que controlaba cuando se recibían las señales de stop para parar un modo y poder usar otro.
8. VÍDEO
9. PRESENTACIÓN
Presentación Power Point