Organizador de Colores Arduino
Introducción
Este proyecto consiste en una máquina la cual es capaz de clasificar bolas/canicas según el color según una serie de colores predeterminados.
Componentes utilizados
- 1 x Placa de Arduino.
- Madera.
- 2 x Servomotores.
- 1 x sensor de color TCS34725.
- Cables.
- Vasos.
- Piezas construidas mediante máquina 3D.
- Bolas de colores.
- Algodón.
Diseño del circuito
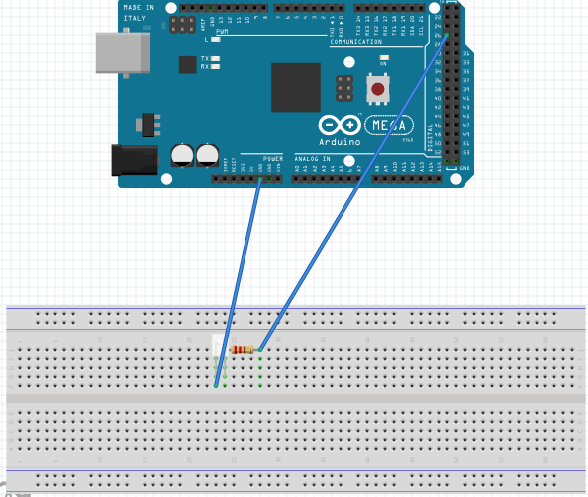
Para el circuito se ha utilizado una placa de Arduino, un sensor de color TCS34725 y dos servomotores, se detalla su esquema en la siguiente imagen:

Proceso de construcción y estructura final
Las piezas 3D fueron desarrolladas con el programa Solid Edge e impresas con la impresora Wanhao Duplicator i3 Plus. Los prototipos de las piezas fueron los siguiente:
Esta pieza (1) es utilizada para bloquear las bolas del tubo para que no puedan salir más de una y también se la encargada de recepcionar la bola para llevarla hacia el sensor.

Esta pieza (2) sirve de apoyo a la pieza (1) para que la bola no se caiga en el proceso del traslado. Al final del recorrido de la pieza hay un agujero por donde se permite el paso de la bola hacia la rampa.
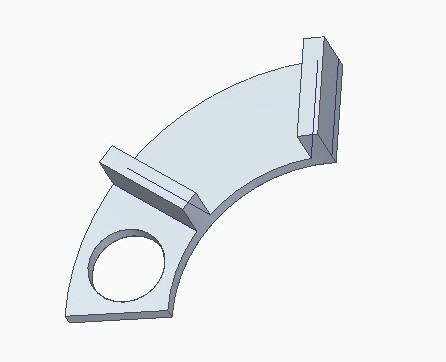
Tubo (3) por el cual se depositan las bolas.

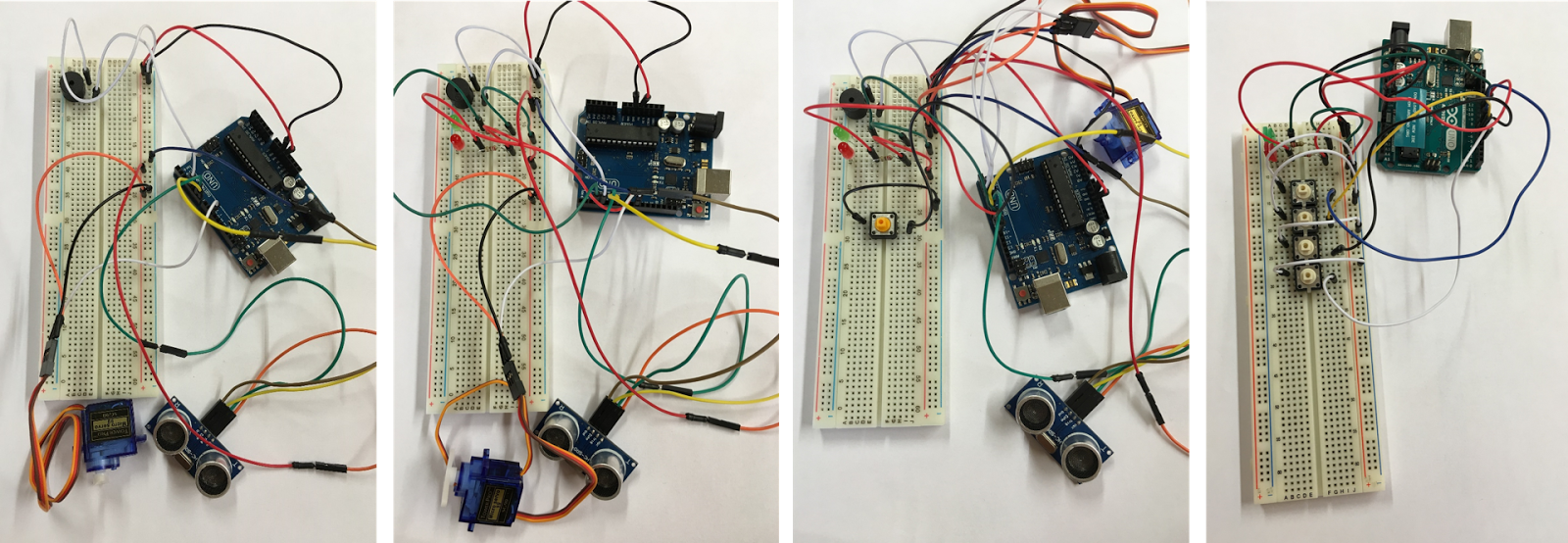
Después de cortar y pegar la madera para montar la estructura, se procedió a colocar las piezas 3D, los servos y el sensor de color, quedando así finalmente la estructura final del proyecto:


Funcionamiento
El funcionamiento del proyecto se detalla a continuación:
Una vez se han introducido los bolas por el tubo cuya ubicación se encuentra en lo más alto de la estructura, se inicia la ejecución de la máquina. La bola cae en una plataforma fijada por el servomotor de la parte superior de la máquina. Este servomotor empieza a funcionar y gira la plataforma donde está depositada la esfera hacia el sensor de color. Cuando la esfera llega al sensor, el servomotor se para unos segundos hasta que se analiza el pigmento de esta.
A continuación, el servomotor de la parte inferior gira la rampa según la posición donde debe de almacenarse la bola. Por último, se vuelve a iniciar el servomotor de la parte superior hasta que llega a la parte final de su recorrido, donde la esfera cae por su propio peso a través de la rampa y llega al almacén (vaso) correspondiente.
Se deja un vídeo donde se puede ver más fácilmente el funcionamiento del aparato:
Librerías y código utilizado
Librerías
<Servo.h>
<Adafruit_TCS34725.h>
<ColorConverterLib.h>
<Wire.h>
Código
https://github.com/lblay/proyecto_DSE
Problemas y soluciones encontradas
- Ajuste de todo el mecanismo, ya que para hacer funcionar todo de forma perfecta hacía falta ajustar todo correctamente y con bastante precisión.
- En un principio utilizamos el sensor de color TCS3200, pero este nos dio bastante problemas a la hora de calibrarlo y utilizarlo, por no hablar que solo es capaz de detectar los colores primarios, así que fue sustituido en su lugar por el TCS34725.
- Problemas con el peso de la rampa, al tener un peso un tanto elevado para la posición que debía de ser colocada encima del servomotor, hubo que añadir un apoyo con una esfera (también valdría una rueda), con el fin de que el servomotor pudiese aguantar el peso.
- El tubo por donde se introducen las bolas debido a lo fino que era se nos rompió en dos ocasiones teniendo que utilizar cinta aislante para la reparación.
- Las piezas impresas en 3D deberían de haberse hecho en color blanco, no azul, ya que tuvimos problemas con el sensor de color (realizaba falsas lecturas) y nos tocó pintarlas de blanco.
Aspectos a mejorar
- Reducir el peso de la rampa con el fin de liberar tensión al servomotor.
- Agilizar la velocidad del proyecto en general, para que haga más rápido las tareas.
- En vez de utilizar un tubo, usar o fabricar mejor un embudo, ya que el tubo limita mucho la capacidad de las bolas y es un engorro echarlas de una en una.